apiVersion: kafka.strimzi.io/v1beta1
kind: CustomResourceDefinition
metadata: (1)
name: kafkatopics.kafka.strimzi.io
labels:
app: strimzi
spec: (2)
group: kafka.strimzi.io
versions:
v1beta1
scope: Namespaced
names:
# ...
singular: kafkatopic
plural: kafkatopics
shortNames:
- kt (3)
additionalPrinterColumns: (4)
# ...
subresources:
status: {} (5)
validation: (6)
openAPIV3Schema:
properties:
spec:
type: object
properties:
partitions:
type: integer
minimum: 1
replicas:
type: integer
minimum: 1
maximum: 32767
# ...Using Strimzi (0.20.0)
Table of Contents
- 1. Overview of Strimzi
- 2. Deployment configuration
- 2.1. Kafka cluster configuration
- 2.1.1. Sample Kafka YAML configuration
- 2.1.2. Data storage considerations
- 2.1.3. Kafka and ZooKeeper storage types
- 2.1.4. Kafka broker replicas
- 2.1.5. Kafka broker configuration
- 2.1.6. Listener configuration
- 2.1.7. ZooKeeper replicas
- 2.1.8. ZooKeeper configuration
- 2.1.9. ZooKeeper connection
- 2.1.10. Entity Operator
- 2.1.11. CPU and memory resources
- 2.1.12. Kafka loggers
- 2.1.13. Kafka rack awareness
- 2.1.14. Healthchecks
- 2.1.15. Prometheus metrics
- 2.1.16. JMX Options
- 2.1.17. Retrieving JMX metrics with JMXTrans
- 2.1.18. JVM Options
- 2.1.19. Container images
- 2.1.20. TLS sidecar
- 2.1.21. Configuring pod scheduling
- 2.1.22. Kafka Exporter
- 2.1.23. Performing a rolling update of a Kafka cluster
- 2.1.24. Performing a rolling update of a ZooKeeper cluster
- 2.1.25. Scaling clusters
- 2.1.26. Deleting Kafka nodes manually
- 2.1.27. Deleting ZooKeeper nodes manually
- 2.1.28. Maintenance time windows for rolling updates
- 2.1.29. Renewing CA certificates manually
- 2.1.30. Replacing private keys
- 2.1.31. List of resources created as part of Kafka cluster
- 2.2. Kafka Connect/S2I cluster configuration
- 2.3. Kafka MirrorMaker cluster configuration
- 2.4. Kafka MirrorMaker 2.0 cluster configuration
- 2.5. Kafka Bridge cluster configuration
- 2.6. Customizing Kubernetes resources
- 2.7. External logging
- 2.1. Kafka cluster configuration
- 3. Configuring external listeners
- 4. Managing secure access to Kafka
- 4.1. Security options for Kafka
- 4.2. Security options for Kafka clients
- 4.3. Securing access to Kafka brokers
- 4.4. Using OAuth 2.0 token-based authentication
- 4.4.1. OAuth 2.0 authentication mechanism
- 4.4.2. OAuth 2.0 Kafka broker configuration
- 4.4.3. Session re-authentication for Kafka brokers
- 4.4.4. OAuth 2.0 Kafka client configuration
- 4.4.5. OAuth 2.0 client authentication flow
- 4.4.6. Configuring OAuth 2.0 authentication
- 4.4.7. Authorization server examples
- 4.5. Using OAuth 2.0 token-based authorization
- 5. Using Strimzi Operators
- 6. Kafka Bridge
- 6.1. Kafka Bridge overview
- 6.2. Kafka Bridge quickstart
- 6.2.1. Deploying the Kafka Bridge to your Kubernetes cluster
- 6.2.2. Exposing the Kafka Bridge service to your local machine
- 6.2.3. Producing messages to topics and partitions
- 6.2.4. Creating a Kafka Bridge consumer
- 6.2.5. Subscribing a Kafka Bridge consumer to topics
- 6.2.6. Retrieving the latest messages from a Kafka Bridge consumer
- 6.2.7. Commiting offsets to the log
- 6.2.8. Seeking to offsets for a partition
- 6.2.9. Deleting a Kafka Bridge consumer
- 7. Cruise Control for cluster rebalancing
- 7.1. Why use Cruise Control?
- 7.2. Optimization goals overview
- 7.3. Optimization proposals overview
- 7.4. Rebalance performance tuning overview
- 7.5. Cruise Control configuration
- 7.6. Deploying Cruise Control
- 7.7. Generating optimization proposals
- 7.8. Approving an optimization proposal
- 7.9. Stopping a cluster rebalance
- 7.10. Fixing problems with a
KafkaRebalanceresource
- 8. Distributed tracing
- 9. Managing TLS certificates
- 10. Managing Strimzi
- Appendix A: Frequently asked questions
- A.1. Questions related to the Cluster Operator
- A.1.1. Why do I need cluster administrator privileges to install Strimzi?
- A.1.2. Why does the Cluster Operator need to create
ClusterRoleBindings? - A.1.3. Can standard Kubernetes users create Kafka custom resources?
- A.1.4. What do the failed to acquire lock warnings in the log mean?
- A.1.5. Why is hostname verification failing when connecting to NodePorts using TLS?
- A.1. Questions related to the Cluster Operator
- Appendix B: Custom Resource API Reference
- B.1. Common configuration properties
- B.2.
Kafkaschema reference - B.3.
KafkaSpecschema reference - B.4.
KafkaClusterSpecschema reference - B.5.
EphemeralStorageschema reference - B.6.
PersistentClaimStorageschema reference - B.7.
PersistentClaimStorageOverrideschema reference - B.8.
JbodStorageschema reference - B.9.
GenericKafkaListenerschema reference - B.10.
KafkaListenerAuthenticationTlsschema reference - B.11.
KafkaListenerAuthenticationScramSha512schema reference - B.12.
KafkaListenerAuthenticationOAuthschema reference - B.13.
GenericSecretSourceschema reference - B.14.
CertSecretSourceschema reference - B.15.
GenericKafkaListenerConfigurationschema reference - B.16.
CertAndKeySecretSourceschema reference - B.17.
GenericKafkaListenerConfigurationBootstrapschema reference - B.18.
GenericKafkaListenerConfigurationBrokerschema reference - B.19.
KafkaListenersschema reference - B.20.
KafkaListenerPlainschema reference - B.21.
KafkaListenerTlsschema reference - B.22.
TlsListenerConfigurationschema reference - B.23.
KafkaListenerExternalRouteschema reference - B.24.
RouteListenerOverrideschema reference - B.25.
RouteListenerBootstrapOverrideschema reference - B.26.
RouteListenerBrokerOverrideschema reference - B.27.
KafkaListenerExternalConfigurationschema reference - B.28.
KafkaListenerExternalLoadBalancerschema reference - B.29.
LoadBalancerListenerOverrideschema reference - B.30.
LoadBalancerListenerBootstrapOverrideschema reference - B.31.
LoadBalancerListenerBrokerOverrideschema reference - B.32.
KafkaListenerExternalNodePortschema reference - B.33.
NodePortListenerOverrideschema reference - B.34.
NodePortListenerBootstrapOverrideschema reference - B.35.
NodePortListenerBrokerOverrideschema reference - B.36.
NodePortListenerConfigurationschema reference - B.37.
KafkaListenerExternalIngressschema reference - B.38.
IngressListenerConfigurationschema reference - B.39.
IngressListenerBootstrapConfigurationschema reference - B.40.
IngressListenerBrokerConfigurationschema reference - B.41.
KafkaAuthorizationSimpleschema reference - B.42.
KafkaAuthorizationOpaschema reference - B.43.
KafkaAuthorizationKeycloakschema reference - B.44.
Rackschema reference - B.45.
Probeschema reference - B.46.
JvmOptionsschema reference - B.47.
SystemPropertyschema reference - B.48.
KafkaJmxOptionsschema reference - B.49.
KafkaJmxAuthenticationPasswordschema reference - B.50.
InlineLoggingschema reference - B.51.
ExternalLoggingschema reference - B.52.
TlsSidecarschema reference - B.53.
KafkaClusterTemplateschema reference - B.54.
StatefulSetTemplateschema reference - B.55.
MetadataTemplateschema reference - B.56.
PodTemplateschema reference - B.57.
ResourceTemplateschema reference - B.58.
ExternalServiceTemplateschema reference - B.59.
PodDisruptionBudgetTemplateschema reference - B.60.
ContainerTemplateschema reference - B.61.
ContainerEnvVarschema reference - B.62.
ZookeeperClusterSpecschema reference - B.63.
ZookeeperClusterTemplateschema reference - B.64.
TopicOperatorSpecschema reference - B.65.
EntityOperatorSpecschema reference - B.66.
EntityTopicOperatorSpecschema reference - B.67.
EntityUserOperatorSpecschema reference - B.68.
EntityOperatorTemplateschema reference - B.69.
CertificateAuthorityschema reference - B.70.
CruiseControlSpecschema reference - B.71.
CruiseControlTemplateschema reference - B.72.
BrokerCapacityschema reference - B.73.
JmxTransSpecschema reference - B.74.
JmxTransOutputDefinitionTemplateschema reference - B.75.
JmxTransQueryTemplateschema reference - B.76.
JmxTransTemplateschema reference - B.77.
KafkaExporterSpecschema reference - B.78.
KafkaExporterTemplateschema reference - B.79.
KafkaStatusschema reference - B.80.
Conditionschema reference - B.81.
ListenerStatusschema reference - B.82.
ListenerAddressschema reference - B.83.
KafkaConnectschema reference - B.84.
KafkaConnectSpecschema reference - B.85.
KafkaConnectTlsschema reference - B.86.
KafkaClientAuthenticationTlsschema reference - B.87.
KafkaClientAuthenticationScramSha512schema reference - B.88.
PasswordSecretSourceschema reference - B.89.
KafkaClientAuthenticationPlainschema reference - B.90.
KafkaClientAuthenticationOAuthschema reference - B.91.
JaegerTracingschema reference - B.92.
KafkaConnectTemplateschema reference - B.93.
ExternalConfigurationschema reference - B.94.
ExternalConfigurationEnvschema reference - B.95.
ExternalConfigurationEnvVarSourceschema reference - B.96.
ExternalConfigurationVolumeSourceschema reference - B.97.
KafkaConnectStatusschema reference - B.98.
ConnectorPluginschema reference - B.99.
KafkaConnectS2Ischema reference - B.100.
KafkaConnectS2ISpecschema reference - B.101.
KafkaConnectS2IStatusschema reference - B.102.
KafkaTopicschema reference - B.103.
KafkaTopicSpecschema reference - B.104.
KafkaTopicStatusschema reference - B.105.
KafkaUserschema reference - B.106.
KafkaUserSpecschema reference - B.107.
KafkaUserTlsClientAuthenticationschema reference - B.108.
KafkaUserScramSha512ClientAuthenticationschema reference - B.109.
KafkaUserAuthorizationSimpleschema reference - B.110.
AclRuleschema reference - B.111.
AclRuleTopicResourceschema reference - B.112.
AclRuleGroupResourceschema reference - B.113.
AclRuleClusterResourceschema reference - B.114.
AclRuleTransactionalIdResourceschema reference - B.115.
KafkaUserQuotasschema reference - B.116.
KafkaUserTemplateschema reference - B.117.
KafkaUserStatusschema reference - B.118.
KafkaMirrorMakerschema reference - B.119.
KafkaMirrorMakerSpecschema reference - B.120.
KafkaMirrorMakerConsumerSpecschema reference - B.121.
KafkaMirrorMakerTlsschema reference - B.122.
KafkaMirrorMakerProducerSpecschema reference - B.123.
KafkaMirrorMakerTemplateschema reference - B.124.
KafkaMirrorMakerStatusschema reference - B.125.
KafkaBridgeschema reference - B.126.
KafkaBridgeSpecschema reference - B.127.
KafkaBridgeTlsschema reference - B.128.
KafkaBridgeHttpConfigschema reference - B.129.
KafkaBridgeHttpCorsschema reference - B.130.
KafkaBridgeConsumerSpecschema reference - B.131.
KafkaBridgeProducerSpecschema reference - B.132.
KafkaBridgeTemplateschema reference - B.133.
KafkaBridgeStatusschema reference - B.134.
KafkaConnectorschema reference - B.135.
KafkaConnectorSpecschema reference - B.136.
KafkaConnectorStatusschema reference - B.137.
KafkaMirrorMaker2schema reference - B.138.
KafkaMirrorMaker2Specschema reference - B.139.
KafkaMirrorMaker2ClusterSpecschema reference - B.140.
KafkaMirrorMaker2Tlsschema reference - B.141.
KafkaMirrorMaker2MirrorSpecschema reference - B.142.
KafkaMirrorMaker2ConnectorSpecschema reference - B.143.
KafkaMirrorMaker2Statusschema reference - B.144.
KafkaRebalanceschema reference - B.145.
KafkaRebalanceSpecschema reference - B.146.
KafkaRebalanceStatusschema reference
1. Overview of Strimzi
Strimzi simplifies the process of running Apache Kafka in a Kubernetes cluster.
This guide provides instructions for configuring Kafka components and using Strimzi Operators. Procedures relate to how you might want to modify your deployment and introduce additional features, such as Cruise Control or distributed tracing.
You can configure your deployment using Strimzi custom resources. The Custom resource API reference describes the properties you can use in your configuration.
|
Note
|
Looking to get started with Strimzi? For step-by-step deployment instructions, see the Deploying Strimzi guide. |
1.1. Kafka capabilities
The underlying data stream-processing capabilities and component architecture of Kafka can deliver:
-
Microservices and other applications to share data with extremely high throughput and low latency
-
Message ordering guarantees
-
Message rewind/replay from data storage to reconstruct an application state
-
Message compaction to remove old records when using a key-value log
-
Horizontal scalability in a cluster configuration
-
Replication of data to control fault tolerance
-
Retention of high volumes of data for immediate access
1.2. Kafka use cases
Kafka’s capabilities make it suitable for:
-
Event-driven architectures
-
Event sourcing to capture changes to the state of an application as a log of events
-
Message brokering
-
Website activity tracking
-
Operational monitoring through metrics
-
Log collection and aggregation
-
Commit logs for distributed systems
-
Stream processing so that applications can respond to data in real time
1.3. How Strimzi supports Kafka
Strimzi provides container images and Operators for running Kafka on Kubernetes. Strimzi Operators are fundamental to the running of Strimzi. The Operators provided with Strimzi are purpose-built with specialist operational knowledge to effectively manage Kafka.
Operators simplify the process of:
-
Deploying and running Kafka clusters
-
Deploying and running Kafka components
-
Configuring access to Kafka
-
Securing access to Kafka
-
Upgrading Kafka
-
Managing brokers
-
Creating and managing topics
-
Creating and managing users
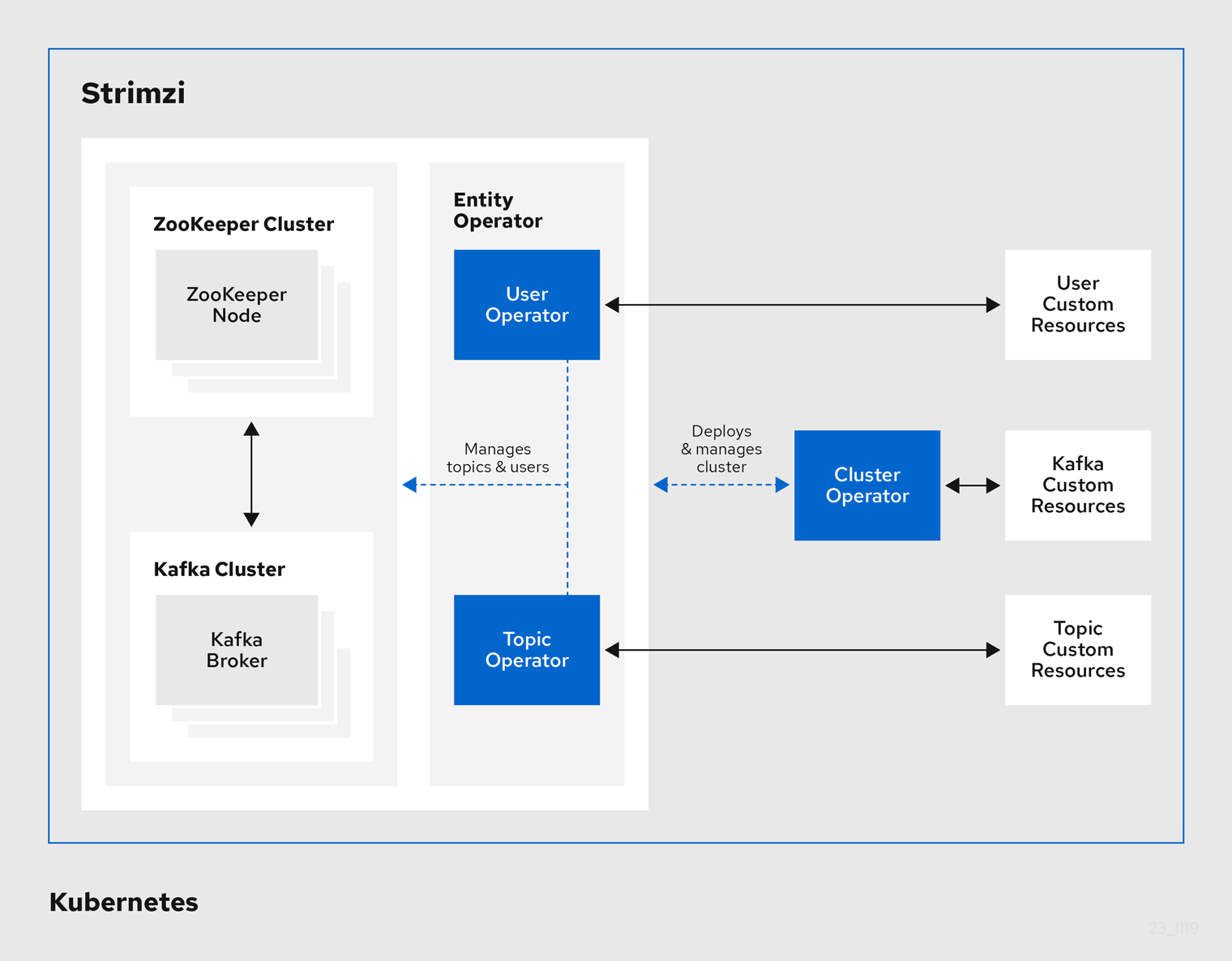
1.4. Strimzi Operators
Strimzi supports Kafka using Operators to deploy and manage the components and dependencies of Kafka to Kubernetes.
Operators are a method of packaging, deploying, and managing a Kubernetes application. Strimzi Operators extend Kubernetes functionality, automating common and complex tasks related to a Kafka deployment. By implementing knowledge of Kafka operations in code, Kafka administration tasks are simplified and require less manual intervention.
Operators
Strimzi provides Operators for managing a Kafka cluster running within a Kubernetes cluster.
- Cluster Operator
-
Deploys and manages Apache Kafka clusters, Kafka Connect, Kafka MirrorMaker, Kafka Bridge, Kafka Exporter, and the Entity Operator
- Entity Operator
-
Comprises the Topic Operator and User Operator
- Topic Operator
-
Manages Kafka topics
- User Operator
-
Manages Kafka users
The Cluster Operator can deploy the Topic Operator and User Operator as part of an Entity Operator configuration at the same time as a Kafka cluster.
Operators within the Strimzi architecture
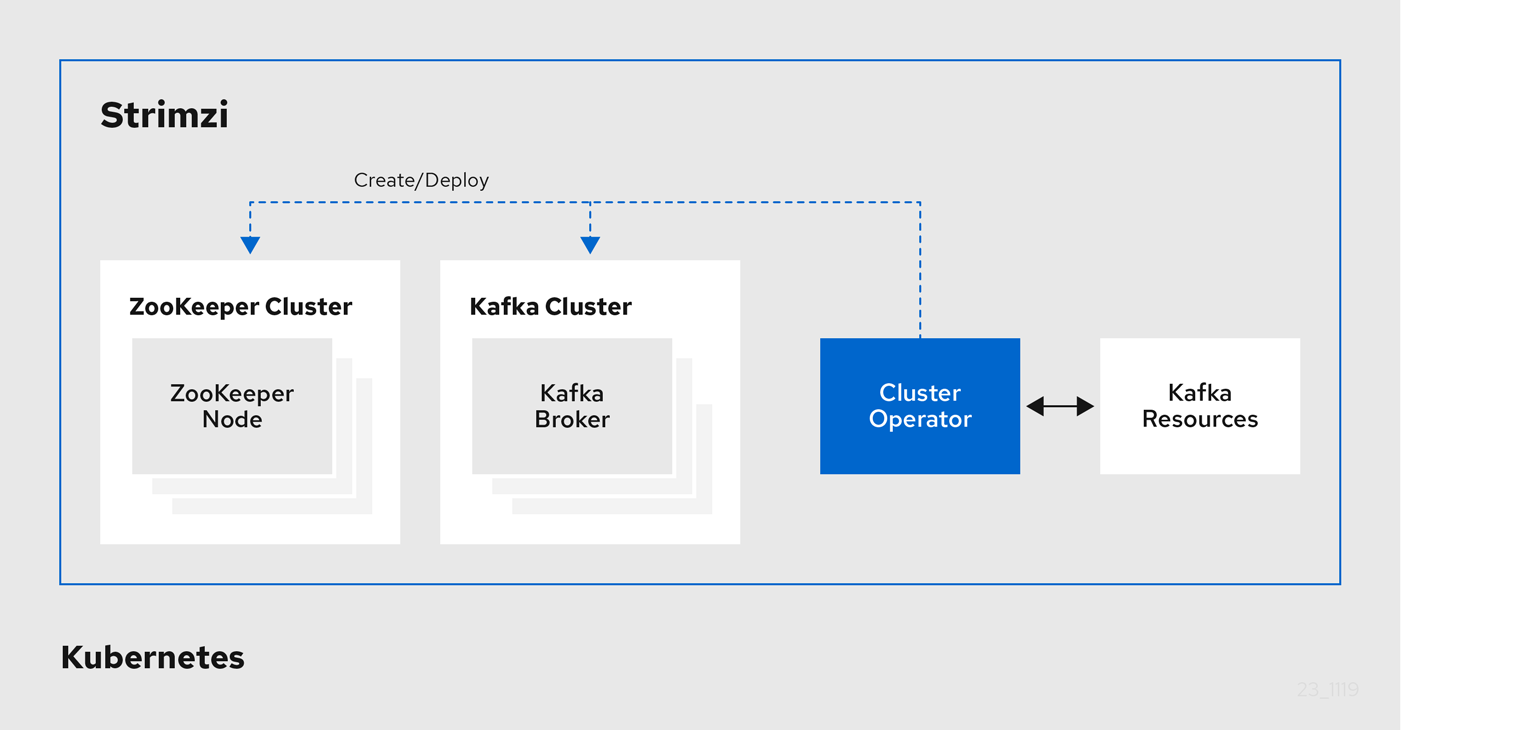
1.4.1. Cluster Operator
Strimzi uses the Cluster Operator to deploy and manage clusters for:
-
Kafka (including ZooKeeper, Entity Operator, Kafka Exporter, and Cruise Control)
-
Kafka Connect
-
Kafka MirrorMaker
-
Kafka Bridge
Custom resources are used to deploy the clusters.
For example, to deploy a Kafka cluster:
-
A
Kafkaresource with the cluster configuration is created within the Kubernetes cluster. -
The Cluster Operator deploys a corresponding Kafka cluster, based on what is declared in the
Kafkaresource.
The Cluster Operator can also deploy (through configuration of the Kafka resource):
-
A Topic Operator to provide operator-style topic management through
KafkaTopiccustom resources -
A User Operator to provide operator-style user management through
KafkaUsercustom resources
The Topic Operator and User Operator function within the Entity Operator on deployment.
Example architecture for the Cluster Operator
1.4.2. Topic Operator
The Topic Operator provides a way of managing topics in a Kafka cluster through Kubernetes resources.
Example architecture for the Topic Operator
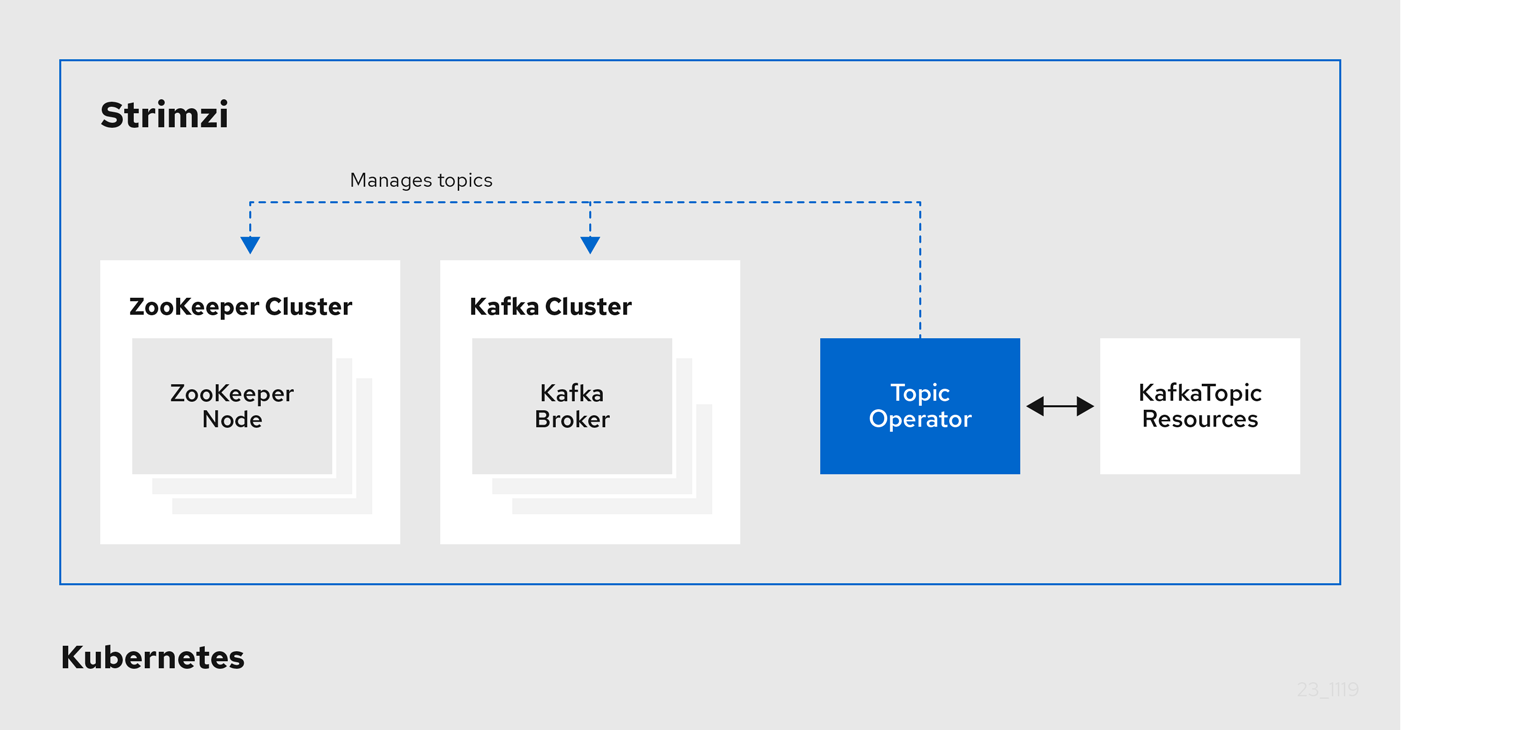
The role of the Topic Operator is to keep a set of KafkaTopic Kubernetes resources describing Kafka topics in-sync with corresponding Kafka topics.
Specifically, if a KafkaTopic is:
-
Created, the Topic Operator creates the topic
-
Deleted, the Topic Operator deletes the topic
-
Changed, the Topic Operator updates the topic
Working in the other direction, if a topic is:
-
Created within the Kafka cluster, the Operator creates a
KafkaTopic -
Deleted from the Kafka cluster, the Operator deletes the
KafkaTopic -
Changed in the Kafka cluster, the Operator updates the
KafkaTopic
This allows you to declare a KafkaTopic as part of your application’s deployment and the Topic Operator will take care of creating the topic for you.
Your application just needs to deal with producing or consuming from the necessary topics.
If the topic is reconfigured or reassigned to different Kafka nodes, the KafkaTopic will always be up to date.
1.4.3. User Operator
The User Operator manages Kafka users for a Kafka cluster by watching for KafkaUser resources that describe Kafka users,
and ensuring that they are configured properly in the Kafka cluster.
For example, if a KafkaUser is:
-
Created, the User Operator creates the user it describes
-
Deleted, the User Operator deletes the user it describes
-
Changed, the User Operator updates the user it describes
Unlike the Topic Operator, the User Operator does not sync any changes from the Kafka cluster with the Kubernetes resources. Kafka topics can be created by applications directly in Kafka, but it is not expected that the users will be managed directly in the Kafka cluster in parallel with the User Operator.
The User Operator allows you to declare a KafkaUser resource as part of your application’s deployment.
You can specify the authentication and authorization mechanism for the user.
You can also configure user quotas that control usage of Kafka resources to ensure, for example, that a user does not monopolize access to a broker.
When the user is created, the user credentials are created in a Secret.
Your application needs to use the user and its credentials for authentication and to produce or consume messages.
In addition to managing credentials for authentication, the User Operator also manages authorization rules by including a description of the user’s access rights in the KafkaUser declaration.
1.5. Strimzi custom resources
A deployment of Kafka components to a Kubernetes cluster using Strimzi is highly configurable through the application of custom resources. Custom resources are created as instances of APIs added by Custom resource definitions (CRDs) to extend Kubernetes resources.
CRDs act as configuration instructions to describe the custom resources in a Kubernetes cluster, and are provided with Strimzi for each Kafka component used in a deployment, as well as users and topics. CRDs and custom resources are defined as YAML files. Example YAML files are provided with the Strimzi distribution.
CRDs also allow Strimzi resources to benefit from native Kubernetes features like CLI accessibility and configuration validation.
Additional resources
1.5.1. Strimzi custom resource example
CRDs require a one-time installation in a cluster to define the schemas used to instantiate and manage Strimzi-specific resources.
After a new custom resource type is added to your cluster by installing a CRD, you can create instances of the resource based on its specification.
Depending on the cluster setup, installation typically requires cluster admin privileges.
|
Note
|
Access to manage custom resources is limited to Strimzi administrators. For more information, see Designating Strimzi administrators in the Deploying Strimzi guide. |
A CRD defines a new kind of resource, such as kind:Kafka, within a Kubernetes cluster.
The Kubernetes API server allows custom resources to be created based on the kind and understands from the CRD how to validate and store the custom resource when it is added to the Kubernetes cluster.
|
Warning
|
When CRDs are deleted, custom resources of that type are also deleted. Additionally, the resources created by the custom resource, such as pods and statefulsets are also deleted. |
Each Strimzi-specific custom resource conforms to the schema defined by the CRD for the resource’s kind.
The custom resources for Strimzi components have common configuration properties, which are defined under spec.
To understand the relationship between a CRD and a custom resource, let’s look at a sample of the CRD for a Kafka topic.
Kafka topic CRD
-
The metadata for the topic CRD, its name and a label to identify the CRD.
-
The specification for this CRD, including the group (domain) name, the plural name and the supported schema version, which are used in the URL to access the API of the topic. The other names are used to identify instance resources in the CLI. For example,
kubectl get kafkatopic my-topicorkubectl get kafkatopics. -
The shortname can be used in CLI commands. For example,
kubectl get ktcan be used as an abbreviation instead ofkubectl get kafkatopic. -
The information presented when using a
getcommand on the custom resource. -
The current status of the CRD as described in the schema reference for the resource.
-
openAPIV3Schema validation provides validation for the creation of topic custom resources. For example, a topic requires at least one partition and one replica.
|
Note
|
You can identify the CRD YAML files supplied with the Strimzi installation files, because the file names contain an index number followed by ‘Crd’. |
Here is a corresponding example of a KafkaTopic custom resource.
Kafka topic custom resource
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaTopic (1)
metadata:
name: my-topic
labels:
strimzi.io/cluster: my-cluster (2)
spec: (3)
partitions: 1
replicas: 1
config:
retention.ms: 7200000
segment.bytes: 1073741824
status:
conditions: (4)
lastTransitionTime: "2019-08-20T11:37:00.706Z"
status: "True"
type: Ready
observedGeneration: 1
/ ...-
The
kindandapiVersionidentify the CRD of which the custom resource is an instance. -
A label, applicable only to
KafkaTopicandKafkaUserresources, that defines the name of the Kafka cluster (which is same as the name of theKafkaresource) to which a topic or user belongs. -
The spec shows the number of partitions and replicas for the topic as well as the configuration parameters for the topic itself. In this example, the retention period for a message to remain in the topic and the segment file size for the log are specified.
-
Status conditions for the
KafkaTopicresource. Thetypecondition changed toReadyat thelastTransitionTime.
Custom resources can be applied to a cluster through the platform CLI. When the custom resource is created, it uses the same validation as the built-in resources of the Kubernetes API.
After a KafkaTopic custom resource is created, the Topic Operator is notified and corresponding Kafka topics are created in Strimzi.
1.6. Listener configuration
Listeners are used to connect to Kafka brokers.
Strimzi provides a generic GenericKafkaListener schema with properties to configure listeners through the Kafka resource.
The GenericKafkaListener provides a flexible approach to listener configuration.
You can specify properties to configure internal listeners for connecting within the Kubernetes cluster, or external listeners for connecting outside the Kubernetes cluster.
Generic listener configuration
Each listener is defined as an array in the Kafka resource.
For more information on listener configuration, see the GenericKafkaListener schema reference.
Generic listener configuration replaces the previous approach to listener configuration using the KafkaListeners schema reference,
which is deprecated.
However, you can convert the old format into the new format with backwards compatibility.
The KafkaListeners schema uses sub-properties for plain, tls and external listeners, with fixed ports for each.
Because of the limits inherent in the architecture of the schema, it is only possible to configure three listeners, with configuration options limited to the type of listener.
With the GenericKafkaListener schema, you can configure as many listeners as required,
as long as their names and ports are unique.
You might want to configure multiple external listeners, for example, to handle access from networks that require different authentication mechanisms.
Or you might need to join your Kubernetes network to an outside network.
In which case, you can configure internal listeners (using the useServiceDnsDomain property) so that the Kubernetes service DNS domain (typically .cluster.local) is not used.
Configuring listeners to secure access to Kafka brokers
You can configure listeners for secure connection using authentication. For more information on securing access to Kafka brokers, see Managing access to Kafka.
Configuring external listeners for client access outside Kubernetes
You can configure external listeners for client access outside a Kubernetes environment using a specified connection mechanism, such as a loadbalancer. For more information on the configuration options for connecting an external client, see Configuring external listeners.
Listener certificates
You can provide your own server certificates, called Kafka listener certificates, for TLS listeners or external listeners which have TLS encryption enabled. For more information, see Kafka listener certificates.
1.7. Document Conventions
Replaceables
In this document, replaceable text is styled in monospace, with italics, uppercase, and hyphens.
For example, in the following code, you will want to replace MY-NAMESPACE with the name of your namespace:
sed -i 's/namespace: .*/namespace: MY-NAMESPACE/' install/cluster-operator/*RoleBinding*.yaml2. Deployment configuration
This chapter describes how to configure different aspects of the supported deployments using custom resources:
-
Kafka clusters
-
Kafka Connect clusters
-
Kafka Connect clusters with Source2Image support
-
Kafka MirrorMaker
-
Kafka Bridge
-
Cruise Control
|
Note
|
Labels applied to a custom resource are also applied to the Kubernetes resources comprising Kafka MirrorMaker. This provides a convenient mechanism for resources to be labeled as required. |
The Deploying Strimzi guide describes how to monitor your Strimzi deployment.
2.1. Kafka cluster configuration
The full schema of the Kafka resource is described in the Kafka schema reference.
All labels that are applied to the desired Kafka resource will also be applied to the Kubernetes resources making up the Kafka cluster.
This provides a convenient mechanism for resources to be labeled as required.
2.1.1. Sample Kafka YAML configuration
For help in understanding the configuration options available for your Kafka deployment, refer to sample YAML file provided here.
The sample shows only some of the possible configuration options, but those that are particularly important include:
-
Resource requests (CPU / Memory)
-
JVM options for maximum and minimum memory allocation
-
Listeners (and authentication)
-
Authentication
-
Storage
-
Rack awareness
-
Metrics
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
replicas: 3 (1)
version: 0.20.0 (2)
resources: (3)
requests:
memory: 64Gi
cpu: "8"
limits: (4)
memory: 64Gi
cpu: "12"
jvmOptions: (5)
-Xms: 8192m
-Xmx: 8192m
listeners: (6)
- name: plain (7)
port: 9092 (8)
type: internal (9)
tls: false (10)
configuration:
useServiceDnsDomain: true (11)
- name: tls
port: 9093
type: internal
tls: true
authentication: (12)
type: tls
- name: external (13)
port: 9094
type: route
tls: true
configuration:
brokerCertChainAndKey: (14)
secretName: my-secret
certificate: my-certificate.crt
key: my-key.key
authorization: (15)
type: simple
config: (16)
auto.create.topics.enable: "false"
offsets.topic.replication.factor: 3
transaction.state.log.replication.factor: 3
transaction.state.log.min.isr: 2
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384" (17)
ssl.enabled.protocols: "TLSv1.2"
ssl.protocol: "TLSv1.2"
storage: (18)
type: persistent-claim (19)
size: 10000Gi (20)
rack: (21)
topologyKey: topology.kubernetes.io/zone
metrics: (22)
lowercaseOutputName: true
rules: (23)
# Special cases and very specific rules
- pattern : kafka.server<type=(.+), name=(.+), clientId=(.+), topic=(.+), partition=(.*)><>Value
name: kafka_server_$1_$2
type: GAUGE
labels:
clientId: "$3"
topic: "$4"
partition: "$5"
# ...
zookeeper: (24)
replicas: 3
resources:
requests:
memory: 8Gi
cpu: "2"
limits:
memory: 8Gi
cpu: "2"
jvmOptions:
-Xms: 4096m
-Xmx: 4096m
storage:
type: persistent-claim
size: 1000Gi
metrics:
# ...
entityOperator: (25)
topicOperator:
resources:
requests:
memory: 512Mi
cpu: "1"
limits:
memory: 512Mi
cpu: "1"
userOperator:
resources:
requests:
memory: 512Mi
cpu: "1"
limits:
memory: 512Mi
cpu: "1"
kafkaExporter: (26)
# ...
cruiseControl: (27)
# ...-
Replicas specifies the number of broker nodes.
-
Kafka version, which can be changed by following the upgrade procedure.
-
Resource requests specify the resources to reserve for a given container.
-
Resource limits specify the maximum resources that can be consumed by a container.
-
JVM options can specify the minimum (
-Xms) and maximum (-Xmx) memory allocation for JVM. -
Listeners configure how clients connect to the Kafka cluster via bootstrap addresses. Listeners are configured as internal or external listeners for connection inside or outside the Kubernetes cluster.
-
Name to identify the listener. Must be unique within the Kafka cluster.
-
Port number used by the listener inside Kafka. The port number has to be unique within a given Kafka cluster. Allowed port numbers are 9092 and higher with the exception of ports 9404 and 9999, which are already used for Prometheus and JMX. Depending on the listener type, the port number might not be the same as the port number that connects Kafka clients.
-
Listener type specified as
internal, or for external listeners, asroute,loadbalancer,nodeportoringress. -
Enables TLS encryption for each listener. Default is
false. TLS encryption is not required forroutelisteners. -
Defines whether the fully-qualified DNS names including the cluster service suffix (usually
.cluster.local) are assigned. -
Listener authentication mechanism specified as mutual TLS, SCRAM-SHA-512 or token-based OAuth 2.0.
-
External listener configuration specifies how the Kafka cluster is exposed outside Kubernetes, such as through a
route,loadbalancerornodeport. -
Optional configuration for a Kafka listener certificate managed by an external Certificate Authority. The
brokerCertChainAndKeyproperty specifies aSecretthat holds a server certificate and a private key. Kafka listener certificates can also be configured for TLS listeners. -
Authorization enables simple, OAUTH 2.0 or OPA authorization on the Kafka broker. Simple authorization uses the
AclAuthorizerKafka plugin. -
Config specifies the broker configuration. Standard Apache Kafka configuration may be provided, restricted to those properties not managed directly by Strimzi.
-
SSL properties for external listeners to run with a specific cipher suite for a TLS version.
-
Storage is configured as
ephemeral,persistent-claimorjbod. -
Storage size for persistent volumes may be increased and additional volumes may be added to JBOD storage.
-
Persistent storage has additional configuration options, such as a storage
idandclassfor dynamic volume provisioning. -
Rack awareness is configured to spread replicas across different racks. A
topologykey must match the label of a cluster node. -
Kafka rules for exporting metrics to a Grafana dashboard through the JMX Exporter. A set of rules provided with Strimzi may be copied to your Kafka resource configuration.
-
ZooKeeper-specific configuration, which contains properties similar to the Kafka configuration.
-
Entity Operator configuration, which specifies the configuration for the Topic Operator and User Operator.
-
Kafka Exporter configuration, which is used to expose data as Prometheus metrics.
-
Cruise Control configuration, which is used to rebalance the Kafka cluster.
2.1.2. Data storage considerations
An efficient data storage infrastructure is essential to the optimal performance of Strimzi.
Block storage is required. File storage, such as NFS, does not work with Kafka.
For your block storage, you can choose, for example:
-
Cloud-based block storage solutions, such as Amazon Elastic Block Store (EBS)
-
Storage Area Network (SAN) volumes accessed by a protocol such as Fibre Channel or iSCSI
|
Note
|
Strimzi does not require Kubernetes raw block volumes. |
File systems
It is recommended that you configure your storage system to use the XFS file system. Strimzi is also compatible with the ext4 file system, but this might require additional configuration for best results.
Apache Kafka and ZooKeeper storage
Use separate disks for Apache Kafka and ZooKeeper.
Three types of data storage are supported:
-
Ephemeral (Recommended for development only)
-
Persistent
-
JBOD (Just a Bunch of Disks, suitable for Kafka only)
For more information, see Kafka and ZooKeeper storage.
Solid-state drives (SSDs), though not essential, can improve the performance of Kafka in large clusters where data is sent to and received from multiple topics asynchronously. SSDs are particularly effective with ZooKeeper, which requires fast, low latency data access.
|
Note
|
You do not need to provision replicated storage because Kafka and ZooKeeper both have built-in data replication. |
2.1.3. Kafka and ZooKeeper storage types
As stateful applications, Kafka and ZooKeeper need to store data on disk. Strimzi supports three storage types for this data:
-
Ephemeral
-
Persistent
-
JBOD storage
|
Note
|
JBOD storage is supported only for Kafka, not for ZooKeeper. |
When configuring a Kafka resource, you can specify the type of storage used by the Kafka broker and its corresponding ZooKeeper node. You configure the storage type using the storage property in the following resources:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper
The storage type is configured in the type field.
|
Warning
|
The storage type cannot be changed after a Kafka cluster is deployed. |
Additional resources
-
For more information about ephemeral storage, see ephemeral storage schema reference.
-
For more information about persistent storage, see persistent storage schema reference.
-
For more information about JBOD storage, see JBOD schema reference.
-
For more information about the schema for
Kafka, seeKafkaschema reference.
Ephemeral storage
Ephemeral storage uses the emptyDir volumes to store data.
To use ephemeral storage, the type field should be set to ephemeral.
|
Important
|
emptyDir volumes are not persistent and the data stored in them will be lost when the Pod is restarted.
After the new pod is started, it has to recover all data from other nodes of the cluster.
Ephemeral storage is not suitable for use with single node ZooKeeper clusters and for Kafka topics with replication factor 1, because it will lead to data loss.
|
An example of Ephemeral storage
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
storage:
type: ephemeral
# ...
zookeeper:
# ...
storage:
type: ephemeral
# ...Log directories
The ephemeral volume will be used by the Kafka brokers as log directories mounted into the following path:
/var/lib/kafka/data/kafka-log_idx_-
Where
idxis the Kafka broker pod index. For example/var/lib/kafka/data/kafka-log0.
Persistent storage
Persistent storage uses Persistent Volume Claims to provision persistent volumes for storing data. Persistent Volume Claims can be used to provision volumes of many different types, depending on the Storage Class which will provision the volume. The data types which can be used with persistent volume claims include many types of SAN storage as well as Local persistent volumes.
To use persistent storage, the type has to be set to persistent-claim.
Persistent storage supports additional configuration options:
id(optional)-
Storage identification number. This option is mandatory for storage volumes defined in a JBOD storage declaration. Default is
0. size(required)-
Defines the size of the persistent volume claim, for example, "1000Gi".
class(optional)-
The Kubernetes Storage Class to use for dynamic volume provisioning.
selector(optional)-
Allows selecting a specific persistent volume to use. It contains key:value pairs representing labels for selecting such a volume.
deleteClaim(optional)-
Boolean value which specifies if the Persistent Volume Claim has to be deleted when the cluster is undeployed. Default is
false.
|
Warning
|
Increasing the size of persistent volumes in an existing Strimzi cluster is only supported in Kubernetes versions that support persistent volume resizing. The persistent volume to be resized must use a storage class that supports volume expansion. For other versions of Kubernetes and storage classes which do not support volume expansion, you must decide the necessary storage size before deploying the cluster. Decreasing the size of existing persistent volumes is not possible. |
Example fragment of persistent storage configuration with 1000Gi
size# ...
storage:
type: persistent-claim
size: 1000Gi
# ...The following example demonstrates the use of a storage class.
Example fragment of persistent storage configuration with specific Storage Class
# ...
storage:
type: persistent-claim
size: 1Gi
class: my-storage-class
# ...Finally, a selector can be used to select a specific labeled persistent volume to provide needed features such as an SSD.
Example fragment of persistent storage configuration with selector
# ...
storage:
type: persistent-claim
size: 1Gi
selector:
hdd-type: ssd
deleteClaim: true
# ...Storage class overrides
You can specify a different storage class for one or more Kafka brokers or ZooKeeper nodes, instead of using the default storage class.
This is useful if, for example, storage classes are restricted to different availability zones or data centers.
You can use the overrides field for this purpose.
In this example, the default storage class is named my-storage-class:
Example Strimzi cluster using storage class overrides
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
labels:
app: my-cluster
name: my-cluster
namespace: myproject
spec:
# ...
kafka:
replicas: 3
storage:
deleteClaim: true
size: 100Gi
type: persistent-claim
class: my-storage-class
overrides:
- broker: 0
class: my-storage-class-zone-1a
- broker: 1
class: my-storage-class-zone-1b
- broker: 2
class: my-storage-class-zone-1c
# ...
zookeeper:
replicas: 3
storage:
deleteClaim: true
size: 100Gi
type: persistent-claim
class: my-storage-class
overrides:
- broker: 0
class: my-storage-class-zone-1a
- broker: 1
class: my-storage-class-zone-1b
- broker: 2
class: my-storage-class-zone-1c
# ...As a result of the configured overrides property, the volumes use the following storage classes:
-
The persistent volumes of ZooKeeper node 0 will use
my-storage-class-zone-1a. -
The persistent volumes of ZooKeeper node 1 will use
my-storage-class-zone-1b. -
The persistent volumes of ZooKeeepr node 2 will use
my-storage-class-zone-1c. -
The persistent volumes of Kafka broker 0 will use
my-storage-class-zone-1a. -
The persistent volumes of Kafka broker 1 will use
my-storage-class-zone-1b. -
The persistent volumes of Kafka broker 2 will use
my-storage-class-zone-1c.
The overrides property is currently used only to override storage class configurations. Overriding other storage configuration fields is not currently supported.
Other fields from the storage configuration are currently not supported.
Persistent Volume Claim naming
When persistent storage is used, it creates Persistent Volume Claims with the following names:
data-cluster-name-kafka-idx-
Persistent Volume Claim for the volume used for storing data for the Kafka broker pod
idx. data-cluster-name-zookeeper-idx-
Persistent Volume Claim for the volume used for storing data for the ZooKeeper node pod
idx.
Log directories
The persistent volume will be used by the Kafka brokers as log directories mounted into the following path:
/var/lib/kafka/data/kafka-log_idx_-
Where
idxis the Kafka broker pod index. For example/var/lib/kafka/data/kafka-log0.
Resizing persistent volumes
You can provision increased storage capacity by increasing the size of the persistent volumes used by an existing Strimzi cluster. Resizing persistent volumes is supported in clusters that use either a single persistent volume or multiple persistent volumes in a JBOD storage configuration.
|
Note
|
You can increase but not decrease the size of persistent volumes. Decreasing the size of persistent volumes is not currently supported in Kubernetes. |
Prerequisites
-
A Kubernetes cluster with support for volume resizing.
-
The Cluster Operator is running.
-
A Kafka cluster using persistent volumes created using a storage class that supports volume expansion.
Procedure
-
In a
Kafkaresource, increase the size of the persistent volume allocated to the Kafka cluster, the ZooKeeper cluster, or both.-
To increase the volume size allocated to the Kafka cluster, edit the
spec.kafka.storageproperty. -
To increase the volume size allocated to the ZooKeeper cluster, edit the
spec.zookeeper.storageproperty.For example, to increase the volume size from
1000Gito2000Gi:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... storage: type: persistent-claim size: 2000Gi class: my-storage-class # ... zookeeper: # ...
-
-
Create or update the resource.
Use
kubectl apply:kubectl apply -f your-fileKubernetes increases the capacity of the selected persistent volumes in response to a request from the Cluster Operator. When the resizing is complete, the Cluster Operator restarts all pods that use the resized persistent volumes. This happens automatically.
Additional resources
For more information about resizing persistent volumes in Kubernetes, see Resizing Persistent Volumes using Kubernetes.
JBOD storage overview
You can configure Strimzi to use JBOD, a data storage configuration of multiple disks or volumes. JBOD is one approach to providing increased data storage for Kafka brokers. It can also improve performance.
A JBOD configuration is described by one or more volumes, each of which can be either ephemeral or persistent. The rules and constraints for JBOD volume declarations are the same as those for ephemeral and persistent storage. For example, you cannot change the size of a persistent storage volume after it has been provisioned.
JBOD configuration
To use JBOD with Strimzi, the storage type must be set to jbod. The volumes property allows you to describe the disks that make up your JBOD storage array or configuration. The following fragment shows an example JBOD configuration:
# ...
storage:
type: jbod
volumes:
- id: 0
type: persistent-claim
size: 100Gi
deleteClaim: false
- id: 1
type: persistent-claim
size: 100Gi
deleteClaim: false
# ...The ids cannot be changed once the JBOD volumes are created.
Users can add or remove volumes from the JBOD configuration.
JBOD and Persistent Volume Claims
When persistent storage is used to declare JBOD volumes, the naming scheme of the resulting Persistent Volume Claims is as follows:
data-id-cluster-name-kafka-idx-
Where
idis the ID of the volume used for storing data for Kafka broker podidx.
Log directories
The JBOD volumes will be used by the Kafka brokers as log directories mounted into the following path:
/var/lib/kafka/data-id/kafka-log_idx_-
Where
idis the ID of the volume used for storing data for Kafka broker podidx. For example/var/lib/kafka/data-0/kafka-log0.
Adding volumes to JBOD storage
This procedure describes how to add volumes to a Kafka cluster configured to use JBOD storage. It cannot be applied to Kafka clusters configured to use any other storage type.
|
Note
|
When adding a new volume under an id which was already used in the past and removed, you have to make sure that the previously used PersistentVolumeClaims have been deleted.
|
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
-
A Kafka cluster with JBOD storage
Procedure
-
Edit the
spec.kafka.storage.volumesproperty in theKafkaresource. Add the new volumes to thevolumesarray. For example, add the new volume with id2:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... storage: type: jbod volumes: - id: 0 type: persistent-claim size: 100Gi deleteClaim: false - id: 1 type: persistent-claim size: 100Gi deleteClaim: false - id: 2 type: persistent-claim size: 100Gi deleteClaim: false # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f KAFKA-CONFIG-FILE -
Create new topics or reassign existing partitions to the new disks.
Additional resources
For more information about reassigning topics, see Partition reassignment.
Removing volumes from JBOD storage
This procedure describes how to remove volumes from Kafka cluster configured to use JBOD storage. It cannot be applied to Kafka clusters configured to use any other storage type. The JBOD storage always has to contain at least one volume.
|
Important
|
To avoid data loss, you have to move all partitions before removing the volumes. |
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
-
A Kafka cluster with JBOD storage with two or more volumes
Procedure
-
Reassign all partitions from the disks which are you going to remove. Any data in partitions still assigned to the disks which are going to be removed might be lost.
-
Edit the
spec.kafka.storage.volumesproperty in theKafkaresource. Remove one or more volumes from thevolumesarray. For example, remove the volumes with ids1and2:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... storage: type: jbod volumes: - id: 0 type: persistent-claim size: 100Gi deleteClaim: false # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Additional resources
For more information about reassigning topics, see Partition reassignment.
2.1.4. Kafka broker replicas
A Kafka cluster can run with many brokers.
You can configure the number of brokers used for the Kafka cluster in Kafka.spec.kafka.replicas.
The best number of brokers for your cluster has to be determined based on your specific use case.
Configuring the number of broker nodes
This procedure describes how to configure the number of Kafka broker nodes in a new cluster. It only applies to new clusters with no partitions. If your cluster already has topics defined, see Scaling clusters.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
-
A Kafka cluster with no topics defined yet
Procedure
-
Edit the
replicasproperty in theKafkaresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... replicas: 3 # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Additional resources
If your cluster already has topics defined, see Scaling clusters.
2.1.5. Kafka broker configuration
Strimzi allows you to customize the configuration of the Kafka brokers in your Kafka cluster. You can specify and configure most of the options listed in the "Broker Configs" section of the Apache Kafka documentation. You cannot configure options that are related to the following areas:
-
Security (Encryption, Authentication, and Authorization)
-
Listener configuration
-
Broker ID configuration
-
Configuration of log data directories
-
Inter-broker communication
-
ZooKeeper connectivity
These options are automatically configured by Strimzi.
For more information on broker configuration, see the KafkaClusterSpec schema.
Listener configuration
You configure listeners for connecting to Kafka brokers. For more information on configuring listeners, see Listener configuration
Authorizing access to Kafka
You can configure your Kafka cluster to allow or decline actions executed by users. For more information on securing access to Kafka brokers, see Managing access to Kafka.
Configuring Kafka brokers
You can configure an existing Kafka broker, or create a new Kafka broker with a specified configuration.
Prerequisites
-
A Kubernetes cluster is available.
-
The Cluster Operator is running.
Procedure
-
Open the YAML configuration file that contains the
Kafkaresource specifying the cluster deployment. -
In the
spec.kafka.configproperty in theKafkaresource, enter one or more Kafka configuration settings. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... config: default.replication.factor: 3 offsets.topic.replication.factor: 3 transaction.state.log.replication.factor: 3 transaction.state.log.min.isr: 1 # ... zookeeper: # ... -
Apply the new configuration to create or update the resource.
Use
kubectl apply:kubectl apply -f kafka.yamlwhere
kafka.yamlis the YAML configuration file for the resource that you want to configure; for example,kafka-persistent.yaml.
2.1.6. Listener configuration
Listeners are used to connect to Kafka brokers.
Strimzi provides a generic GenericKafkaListener schema with properties to configure listeners through the Kafka resource.
The GenericKafkaListener provides a flexible approach to listener configuration.
You can specify properties to configure internal listeners for connecting within the Kubernetes cluster, or external listeners for connecting outside the Kubernetes cluster.
Generic listener configuration
Each listener is defined as an array in the Kafka resource.
For more information on listener configuration, see the GenericKafkaListener schema reference.
Generic listener configuration replaces the previous approach to listener configuration using the KafkaListeners schema reference,
which is deprecated.
However, you can convert the old format into the new format with backwards compatibility.
The KafkaListeners schema uses sub-properties for plain, tls and external listeners, with fixed ports for each.
Because of the limits inherent in the architecture of the schema, it is only possible to configure three listeners, with configuration options limited to the type of listener.
With the GenericKafkaListener schema, you can configure as many listeners as required,
as long as their names and ports are unique.
You might want to configure multiple external listeners, for example, to handle access from networks that require different authentication mechanisms.
Or you might need to join your Kubernetes network to an outside network.
In which case, you can configure internal listeners (using the useServiceDnsDomain property) so that the Kubernetes service DNS domain (typically .cluster.local) is not used.
Configuring listeners to secure access to Kafka brokers
You can configure listeners for secure connection using authentication. For more information on securing access to Kafka brokers, see Managing access to Kafka.
Configuring external listeners for client access outside Kubernetes
You can configure external listeners for client access outside a Kubernetes environment using a specified connection mechanism, such as a loadbalancer. For more information on the configuration options for connecting an external client, see Configuring external listeners.
Listener certificates
You can provide your own server certificates, called Kafka listener certificates, for TLS listeners or external listeners which have TLS encryption enabled. For more information, see Kafka listener certificates.
2.1.7. ZooKeeper replicas
ZooKeeper clusters or ensembles usually run with an odd number of nodes, typically three, five, or seven.
The majority of nodes must be available in order to maintain an effective quorum. If the ZooKeeper cluster loses its quorum, it will stop responding to clients and the Kafka brokers will stop working. Having a stable and highly available ZooKeeper cluster is crucial for Strimzi.
- Three-node cluster
-
A three-node ZooKeeper cluster requires at least two nodes to be up and running in order to maintain the quorum. It can tolerate only one node being unavailable.
- Five-node cluster
-
A five-node ZooKeeper cluster requires at least three nodes to be up and running in order to maintain the quorum. It can tolerate two nodes being unavailable.
- Seven-node cluster
-
A seven-node ZooKeeper cluster requires at least four nodes to be up and running in order to maintain the quorum. It can tolerate three nodes being unavailable.
|
Note
|
For development purposes, it is also possible to run ZooKeeper with a single node. |
Having more nodes does not necessarily mean better performance, as the costs to maintain the quorum will rise with the number of nodes in the cluster. Depending on your availability requirements, you can decide for the number of nodes to use.
Number of ZooKeeper nodes
The number of ZooKeeper nodes can be configured using the replicas property in Kafka.spec.zookeeper.
An example showing replicas configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
replicas: 3
# ...Changing the number of ZooKeeper replicas
Prerequisites
-
A Kubernetes cluster is available.
-
The Cluster Operator is running.
Procedure
-
Open the YAML configuration file that contains the
Kafkaresource specifying the cluster deployment. -
In the
spec.zookeeper.replicasproperty in theKafkaresource, enter the number of replicated ZooKeeper servers. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... zookeeper: # ... replicas: 3 # ... -
Apply the new configuration to create or update the resource.
Use
kubectl apply:kubectl apply -f kafka.yamlwhere
kafka.yamlis the YAML configuration file for the resource that you want to configure; for example,kafka-persistent.yaml.
2.1.8. ZooKeeper configuration
Strimzi allows you to customize the configuration of Apache ZooKeeper nodes. You can specify and configure most of the options listed in the ZooKeeper documentation.
Options which cannot be configured are those related to the following areas:
-
Security (Encryption, Authentication, and Authorization)
-
Listener configuration
-
Configuration of data directories
-
ZooKeeper cluster composition
These options are automatically configured by Strimzi.
ZooKeeper configuration
ZooKeeper nodes are configured using the config property in Kafka.spec.zookeeper.
This property contains the ZooKeeper configuration options as keys.
The values can be described using one of the following JSON types:
-
String
-
Number
-
Boolean
Users can specify and configure the options listed in ZooKeeper documentation with the exception of those options which are managed directly by Strimzi. Specifically, all configuration options with keys equal to or starting with one of the following strings are forbidden:
-
server. -
dataDir -
dataLogDir -
clientPort -
authProvider -
quorum.auth -
requireClientAuthScheme
When one of the forbidden options is present in the config property, it is ignored and a warning message is printed to the Cluster Operator log file.
All other options are passed to ZooKeeper.
|
Important
|
The Cluster Operator does not validate keys or values in the provided config object.
When invalid configuration is provided, the ZooKeeper cluster might not start or might become unstable.
In such cases, the configuration in the Kafka.spec.zookeeper.config object should be fixed and the Cluster Operator will roll out the new configuration to all ZooKeeper nodes.
|
Selected options have default values:
-
timeTickwith default value2000 -
initLimitwith default value5 -
syncLimitwith default value2 -
autopurge.purgeIntervalwith default value1
These options will be automatically configured when they are not present in the Kafka.spec.zookeeper.config property.
Use the three allowed ssl configuration options for client connection using a specific cipher suite for a TLS version.
A cipher suite combines algorithms for secure connection and data transfer.
Example ZooKeeper configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
kafka:
# ...
zookeeper:
# ...
config:
autopurge.snapRetainCount: 3
autopurge.purgeInterval: 1
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384" (1)
ssl.enabled.protocols: "TLSv1.2" (2)
ssl.protocol: "TLSv1.2" (3)
# ...-
The cipher suite for TLS using a combination of
ECDHEkey exchange mechanism,RSAauthentication algorithm,AESbulk encyption algorithm andSHA384MAC algorithm. -
The SSl protocol
TLSv1.2is enabled. -
Specifies the
TLSv1.2protocol to generate the SSL context. Allowed values areTLSv1.1andTLSv1.2.
Configuring ZooKeeper
Prerequisites
-
A Kubernetes cluster is available.
-
The Cluster Operator is running.
Procedure
-
Open the YAML configuration file that contains the
Kafkaresource specifying the cluster deployment. -
In the
spec.zookeeper.configproperty in theKafkaresource, enter one or more ZooKeeper configuration settings. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... zookeeper: # ... config: autopurge.snapRetainCount: 3 autopurge.purgeInterval: 1 # ... -
Apply the new configuration to create or update the resource.
Use
kubectl apply:kubectl apply -f kafka.yamlwhere
kafka.yamlis the YAML configuration file for the resource that you want to configure; for example,kafka-persistent.yaml.
2.1.9. ZooKeeper connection
ZooKeeper services are secured with encryption and authentication and are not intended to be used by external applications that are not part of Strimzi.
However, if you want to use Kafka CLI tools that require a connection to ZooKeeper, you can use a terminal inside a ZooKeeper container and connect to localhost:12181 as the ZooKeeper address.
Connecting to ZooKeeper from a terminal
Most Kafka CLI tools can connect directly to Kafka. So you should under normal circumstances not need to connect to ZooKeeper. In case it is needed, you can follow this procedure. Open a terminal inside a ZooKeeper container to use Kafka CLI tools that require a ZooKeeper connection.
Prerequisites
-
A Kubernetes cluster is available.
-
A Kafka cluster is running.
-
The Cluster Operator is running.
Procedure
-
Open the terminal using the Kubernetes console or run the
execcommand from your CLI.For example:
kubectl exec -it my-cluster-zookeeper-0 -- bin/kafka-topics.sh --list --zookeeper localhost:12181Be sure to use
localhost:12181.You can now run Kafka commands to ZooKeeper.
2.1.10. Entity Operator
The Entity Operator is responsible for managing Kafka-related entities in a running Kafka cluster.
The Entity Operator comprises the:
-
Topic Operator to manage Kafka topics
-
User Operator to manage Kafka users
Through Kafka resource configuration, the Cluster Operator can deploy the Entity Operator, including one or both operators, when deploying a Kafka cluster.
|
Note
|
When deployed, the Entity Operator contains the operators according to the deployment configuration. |
The operators are automatically configured to manage the topics and users of the Kafka cluster.
Entity Operator configuration properties
Use the entityOperator property in Kafka.spec to configure the Entity Operator.
The entityOperator property supports several sub-properties:
-
tlsSidecar -
topicOperator -
userOperator -
template
The tlsSidecar property contains the configuration of the TLS sidecar container, which is used to communicate with ZooKeeper.
For more information on configuring the TLS sidecar, see TLS sidecar.
The template property contains the configuration of the Entity Operator pod, such as labels, annotations, affinity, and tolerations.
For more information on configuring templates, see Customizing Kubernetes resources.
The topicOperator property contains the configuration of the Topic Operator.
When this option is missing, the Entity Operator is deployed without the Topic Operator.
The userOperator property contains the configuration of the User Operator.
When this option is missing, the Entity Operator is deployed without the User Operator.
For more information on the properties to configure the Entity Operator, see the EntityUserOperatorSpec schema reference.
Example of basic configuration enabling both operators
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
topicOperator: {}
userOperator: {}If an empty object ({}) is used for the topicOperator and userOperator, all properties use their default values.
When both topicOperator and userOperator properties are missing, the Entity Operator is not deployed.
Topic Operator configuration properties
Topic Operator deployment can be configured using additional options inside the topicOperator object.
The following properties are supported:
watchedNamespace-
The Kubernetes namespace in which the topic operator watches for
KafkaTopics. Default is the namespace where the Kafka cluster is deployed. reconciliationIntervalSeconds-
The interval between periodic reconciliations in seconds. Default
90. zookeeperSessionTimeoutSeconds-
The ZooKeeper session timeout in seconds. Default
20. topicMetadataMaxAttempts-
The number of attempts at getting topic metadata from Kafka. The time between each attempt is defined as an exponential back-off. Consider increasing this value when topic creation could take more time due to the number of partitions or replicas. Default
6. image-
The
imageproperty can be used to configure the container image which will be used. For more details about configuring custom container images, see Container images. resources-
The
resourcesproperty configures the amount of resources allocated to the Topic Operator. For more details about resource request and limit configuration, see CPU and memory resources. logging-
The
loggingproperty configures the logging of the Topic Operator. For more details, see Operator loggers.
Example of Topic Operator configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
# ...
topicOperator:
watchedNamespace: my-topic-namespace
reconciliationIntervalSeconds: 60
# ...User Operator configuration properties
User Operator deployment can be configured using additional options inside the userOperator object.
The following properties are supported:
watchedNamespace-
The Kubernetes namespace in which the user operator watches for
KafkaUsers. Default is the namespace where the Kafka cluster is deployed. reconciliationIntervalSeconds-
The interval between periodic reconciliations in seconds. Default
120. zookeeperSessionTimeoutSeconds-
The ZooKeeper session timeout in seconds. Default
6. image-
The
imageproperty can be used to configure the container image which will be used. For more details about configuring custom container images, see Container images. resources-
The
resourcesproperty configures the amount of resources allocated to the User Operator. For more details about resource request and limit configuration, see CPU and memory resources. logging-
The
loggingproperty configures the logging of the User Operator. For more details, see Operator loggers.
Example of User Operator configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
# ...
userOperator:
watchedNamespace: my-user-namespace
reconciliationIntervalSeconds: 60
# ...Operator loggers
The Topic Operator and User Operator have a configurable logger:
-
rootLogger.level
The operators use the Apache log4j2 logger implementation.
Use the logging property in the Kafka resource to configure loggers and logger levels.
You can set the log levels by specifying the logger and level directly (inline) or use a custom (external) ConfigMap.
If a ConfigMap is used, you set logging.name property to the name of the ConfigMap containing the external logging configuration. Inside the ConfigMap, the logging configuration is described using log4j2.properties.
Here we see examples of inline and external logging.
Inline logging
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
# ...
topicOperator:
watchedNamespace: my-topic-namespace
reconciliationIntervalSeconds: 60
logging:
type: inline
loggers:
rootLogger.level: INFO
# ...
userOperator:
watchedNamespace: my-topic-namespace
reconciliationIntervalSeconds: 60
logging:
type: inline
loggers:
rootLogger.level: INFO
# ...External logging
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
# ...
topicOperator:
watchedNamespace: my-topic-namespace
reconciliationIntervalSeconds: 60
logging:
type: external
name: customConfigMap
# ...Additional resources
-
Garbage collector (GC) logging can also be enabled (or disabled). For more information about GC logging, see JVM configuration
-
For more information about log levels, see Apache logging services.
Configuring the Entity Operator
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
entityOperatorproperty in theKafkaresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... zookeeper: # ... entityOperator: topicOperator: watchedNamespace: my-topic-namespace reconciliationIntervalSeconds: 60 userOperator: watchedNamespace: my-user-namespace reconciliationIntervalSeconds: 60 -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.11. CPU and memory resources
For every deployed container, Strimzi allows you to request specific resources and define the maximum consumption of those resources.
Strimzi supports two types of resources:
-
CPU
-
Memory
Strimzi uses the Kubernetes syntax for specifying CPU and memory resources.
Resource limits and requests
Resource limits and requests are configured using the resources property in the following resources:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper -
Kafka.spec.entityOperator.topicOperator -
Kafka.spec.entityOperator.userOperator -
Kafka.spec.entityOperator.tlsSidecar -
Kafka.spec.kafkaExporter -
KafkaConnect.spec -
KafkaConnectS2I.spec -
KafkaBridge.spec
Additional resources
-
For more information about managing computing resources on Kubernetes, see Managing Compute Resources for Containers.
Resource requests
Requests specify the resources to reserve for a given container. Reserving the resources ensures that they are always available.
|
Important
|
If the resource request is for more than the available free resources in the Kubernetes cluster, the pod is not scheduled. |
Resources requests are specified in the requests property.
Resources requests currently supported by Strimzi:
-
cpu -
memory
A request may be configured for one or more supported resources.
Example resource request configuration with all resources
# ...
resources:
requests:
cpu: 12
memory: 64Gi
# ...Resource limits
Limits specify the maximum resources that can be consumed by a given container. The limit is not reserved and might not always be available. A container can use the resources up to the limit only when they are available. Resource limits should be always higher than the resource requests.
Resource limits are specified in the limits property.
Resource limits currently supported by Strimzi:
-
cpu -
memory
A resource may be configured for one or more supported limits.
Example resource limits configuration
# ...
resources:
limits:
cpu: 12
memory: 64Gi
# ...Supported CPU formats
CPU requests and limits are supported in the following formats:
-
Number of CPU cores as integer (
5CPU core) or decimal (2.5CPU core). -
Number or millicpus / millicores (
100m) where 1000 millicores is the same1CPU core.
Example CPU units
# ...
resources:
requests:
cpu: 500m
limits:
cpu: 2.5
# ...|
Note
|
The computing power of 1 CPU core may differ depending on the platform where Kubernetes is deployed. |
Additional resources
-
For more information on CPU specification, see the Meaning of CPU.
Supported memory formats
Memory requests and limits are specified in megabytes, gigabytes, mebibytes, and gibibytes.
-
To specify memory in megabytes, use the
Msuffix. For example1000M. -
To specify memory in gigabytes, use the
Gsuffix. For example1G. -
To specify memory in mebibytes, use the
Misuffix. For example1000Mi. -
To specify memory in gibibytes, use the
Gisuffix. For example1Gi.
An example of using different memory units
# ...
resources:
requests:
memory: 512Mi
limits:
memory: 2Gi
# ...Additional resources
-
For more details about memory specification and additional supported units, see Meaning of memory.
Configuring resource requests and limits
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
resourcesproperty in the resource specifying the cluster deployment. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... resources: requests: cpu: "8" memory: 64Gi limits: cpu: "12" memory: 128Gi # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Additional resources
-
For more information about the schema, see ResourceRequirements API reference.
2.1.12. Kafka loggers
Kafka has its own configurable loggers:
-
log4j.logger.org.I0Itec.zkclient.ZkClient -
log4j.logger.org.apache.zookeeper -
log4j.logger.kafka -
log4j.logger.org.apache.kafka -
log4j.logger.kafka.request.logger -
log4j.logger.kafka.network.Processor -
log4j.logger.kafka.server.KafkaApis -
log4j.logger.kafka.network.RequestChannel$ -
log4j.logger.kafka.controller -
log4j.logger.kafka.log.LogCleaner -
log4j.logger.state.change.logger -
log4j.logger.kafka.authorizer.logger
ZooKeeper also has a configurable logger:
-
zookeeper.root.logger
Kafka and ZooKeeper use the Apache log4j logger implementation.
Operators use the Apache log4j2 logger implementation, so the logging configuration is described inside the ConfigMap using log4j2.properties.
For more information, see Operator loggers.
Use the logging property to configure loggers and logger levels.
You can set the log levels by specifying the logger and level directly (inline) or use a custom (external) ConfigMap.
If a ConfigMap is used, you set logging.name property to the name of the ConfigMap containing the external logging configuration. Inside the ConfigMap, the logging configuration is described using log4j.properties.
Here we see examples of inline and external logging.
Inline logging
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
# ...
kafka:
# ...
logging:
type: inline
loggers:
kafka.root.logger.level: "INFO"
# ...
zookeeper:
# ...
logging:
type: inline
loggers:
zookeeper.root.logger: "INFO"
# ...
entityOperator:
# ...
topicOperator:
# ...
logging:
type: inline
loggers:
rootLogger.level: INFO
# ...
userOperator:
# ...
logging:
type: inline
loggers:
rootLogger.level: INFO
# ...External logging
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
# ...
logging:
type: external
name: customConfigMap
# ...Changes to both external and inline logging levels will be applied to Kafka brokers without a restart.
Additional resources
-
Garbage collector (GC) logging can also be enabled (or disabled). For more information on garbage collection, see JVM configuration
-
For more information about log levels, see Apache logging services.
2.1.13. Kafka rack awareness
The rack awareness feature in Strimzi helps to spread the Kafka broker pods and Kafka topic replicas across different racks. Enabling rack awareness helps to improve availability of Kafka brokers and the topics they are hosting.
|
Note
|
"Rack" might represent an availability zone, data center, or an actual rack in your data center. |
Configuring rack awareness in Kafka brokers
Kafka rack awareness can be configured in the rack property of Kafka.spec.kafka.
The rack object has one mandatory field named topologyKey.
This key needs to match one of the labels assigned to the Kubernetes cluster nodes.
The label is used by Kubernetes when scheduling the Kafka broker pods to nodes.
If the Kubernetes cluster is running on a cloud provider platform, that label should represent the availability zone where the node is running.
Usually, the nodes are labeled with topology.kubernetes.io/zone label (or failure-domain.beta.kubernetes.io/zone on older Kubernetes versions) that can be used as the topologyKey value.
For more information about Kubernetes node labels, see Well-Known Labels, Annotations and Taints.
This has the effect of spreading the broker pods across zones, and also setting the brokers' broker.rack configuration parameter inside Kafka broker.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Consult your Kubernetes administrator regarding the node label that represents the zone / rack into which the node is deployed.
-
Edit the
rackproperty in theKafkaresource using the label as the topology key.apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... rack: topologyKey: topology.kubernetes.io/zone # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Additional resources
-
For information about Configuring init container image for Kafka rack awareness, see Container images.
2.1.14. Healthchecks
Healthchecks are periodical tests which verify the health of an application. When a Healthcheck probe fails, Kubernetes assumes that the application is not healthy and attempts to fix it.
Kubernetes supports two types of Healthcheck probes:
-
Liveness probes
-
Readiness probes
For more details about the probes, see Configure Liveness and Readiness Probes. Both types of probes are used in Strimzi components.
Users can configure selected options for liveness and readiness probes.
Healthcheck configurations
Liveness and readiness probes can be configured using the livenessProbe and readinessProbe properties in following resources:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper -
Kafka.spec.entityOperator.tlsSidecar -
Kafka.spec.entityOperator.topicOperator -
Kafka.spec.entityOperator.userOperator -
Kafka.spec.kafkaExporter -
KafkaConnect.spec -
KafkaConnectS2I.spec -
KafkaMirrorMaker.spec -
KafkaBridge.spec
Both livenessProbe and readinessProbe support the following options:
-
initialDelaySeconds -
timeoutSeconds -
periodSeconds -
successThreshold -
failureThreshold
For more information about the livenessProbe and readinessProbe options, see Probe schema reference.
An example of liveness and readiness probe configuration
# ...
readinessProbe:
initialDelaySeconds: 15
timeoutSeconds: 5
livenessProbe:
initialDelaySeconds: 15
timeoutSeconds: 5
# ...Configuring healthchecks
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
livenessProbeorreadinessProbeproperty in theKafkaresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... readinessProbe: initialDelaySeconds: 15 timeoutSeconds: 5 livenessProbe: initialDelaySeconds: 15 timeoutSeconds: 5 # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.15. Prometheus metrics
Strimzi supports Prometheus metrics using Prometheus JMX exporter to convert the JMX metrics supported by Apache Kafka and ZooKeeper to Prometheus metrics. When metrics are enabled, they are exposed on port 9404.
For more information about setting up and deploying Prometheus and Grafana, see Introducing Metrics to Kafka in the Deploying Strimzi guide.
Metrics configuration
Prometheus metrics are enabled by configuring the metrics property in following resources:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper -
KafkaConnect.spec -
KafkaConnectS2I.spec
When the metrics property is not defined in the resource, the Prometheus metrics will be disabled.
To enable Prometheus metrics export without any further configuration, you can set it to an empty object ({}).
Example of enabling metrics without any further configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
metrics: {}
# ...
zookeeper:
# ...The metrics property might contain additional configuration for the Prometheus JMX exporter.
Example of enabling metrics with additional Prometheus JMX Exporter configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
metrics:
lowercaseOutputName: true
rules:
- pattern: "kafka.server<type=(.+), name=(.+)PerSec\\w*><>Count"
name: "kafka_server_$1_$2_total"
- pattern: "kafka.server<type=(.+), name=(.+)PerSec\\w*, topic=(.+)><>Count"
name: "kafka_server_$1_$2_total"
labels:
topic: "$3"
# ...
zookeeper:
# ...Configuring Prometheus metrics
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
metricsproperty in theKafkaresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... zookeeper: # ... metrics: lowercaseOutputName: true # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.16. JMX Options
Strimzi supports obtaining JMX metrics from the Kafka brokers by opening a JMX port on 9999.
You can obtain various metrics about each Kafka broker, for example, usage data such as the BytesPerSecond value
or the request rate of the network of the broker.
Strimzi supports opening a password and username protected JMX port or a non-protected JMX port.
Configuring JMX options
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
You can configure JMX options by using the jmxOptions property in the following resources:
-
Kafka.spec.kafka
You can configure username and password protection for the JMX port that is opened on the Kafka brokers.
Securing the JMX Port
You can secure the JMX port to prevent unauthorized pods from accessing the port.
Currently the JMX port can only be secured using a username and password.
To enable security for the JMX port, set the type parameter in the authentication field to password.:
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
jmxOptions:
authentication:
type: "password"
# ...
zookeeper:
# ...This allows you to deploy a pod internally into a cluster and obtain JMX metrics by using the headless service and specifying which broker you want to address. To get JMX metrics from broker 0 we address the headless service appending broker 0 in front of the headless service:
"<cluster-name>-kafka-0-<cluster-name>-<headless-service-name>"If the JMX port is secured, you can get the username and password by referencing them from the JMX secret in the deployment of your pod.
Using an open JMX port
To disable security for the JMX port, do not fill in the authentication field
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
jmxOptions: {}
# ...
zookeeper:
# ...This will just open the JMX Port on the headless service and you can follow a similar approach as described above to deploy a pod into the cluster. The only difference is that any pod will be able to read from the JMX port.
2.1.17. Retrieving JMX metrics with JMXTrans
JmxTrans is a way of retrieving JMX metrics data from Java processes and pushing that data in various formats to remote sinks inside or outside of the cluster. JmxTrans can communicate with a secure JMX port. Strimzi supports using JmxTrans to read JMX data from Kafka brokers.
Jmxtrans
JmxTrans reads JMX metrics data from secure or insecure Kafka brokers and pushes the data to remote sinks in various data formats. An example use case of the Jmxtrans would be to obtain JMX metrics about the request rate of each Kafka broker’s network and push it to a Logstash database outside of the Kubernetes cluster.
Configuring a JMXTrans deployment
Prerequisites
-
A running Kubernetes cluster
You can configure a JmxTrans deployment by using the Kafka.spec.jmxTrans property.
A JmxTrans deployment can read from a secure or insecure Kafka broker.
To configure a JmxTrans deployment, define the following properties:
-
Kafka.spec.jmxTrans.outputDefinitions -
Kafka.spec.jmxTrans.kafkaQueries
For more information on these properties see, JmxTransSpec schema reference.
|
Note
|
JmxTrans will not come up enable you specify that JmxOptions on the Kafka broker. For more information see, Kafka Jmx Options .Configuring JmxTrans output definitions |
Output definitions specify where JMX metrics are pushed to, and in which data format.
For information about supported data formats, see Data formats.
How many seconds JmxTrans agent waits for before pushing new data can be configured through the flushDelay property.
The host and port properties define the target host address and target port the data is pushed to.
The name property is a required property that is referenced by the Kafka.spec.jmxTrans.kafkaQueries property.
Here is an example configuration pushing JMX data in the Graphite format every 5 seconds to a Logstash database on http://myLogstash:9999, and another pushing to standardOut (standard output):
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
jmxTrans:
outputDefinitions:
- outputType: "com.googlecode.jmxtrans.model.output.GraphiteWriter"
host: "http://myLogstash"
port: 9999
flushDelay: 5
name: "logstash"
- outputType: "com.googlecode.jmxtrans.model.output.StdOutWriter"
name: "standardOut"
# ...
# ...
zookeeper:
# ...Configuring JmxTrans queries
JmxTrans queries specify what JMX metrics are read from the Kafka brokers.
Currently JmxTrans queries can only be sent to the Kafka Brokers.
Configure the targetMBean property to specify which target MBean on the Kafka broker is addressed.
Configuring the attributes property specifies which MBean attribute is read as JMX metrics from the target MBean.
JmxTrans supports wildcards to read from target MBeans, and filter by specifying the typenames.
The outputs property defines where the metrics are pushed to by specifying the name of the output definitions.
The following JmxTrans deployment reads from all MBeans that match the pattern kafka.server:type=BrokerTopicMetrics,name=* and have name in the target MBean’s name.
From those Mbeans, it obtains JMX metrics about the Count attribute and pushes the metrics to standard output as defined by outputs.
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
# ...
jmxTrans:
kafkaQueries:
- targetMBean: "kafka.server:type=BrokerTopicMetrics,*"
typeNames: ["name"]
attributes: ["Count"]
outputs: ["standardOut"]
zookeeper:
# ...Additional resources
For more information about the Jmxtrans see Jmxtrans github
2.1.18. JVM Options
The following components of Strimzi run inside a Virtual Machine (VM):
-
Apache Kafka
-
Apache ZooKeeper
-
Apache Kafka Connect
-
Apache Kafka MirrorMaker
-
Strimzi Kafka Bridge
JVM configuration options optimize the performance for different platforms and architectures. Strimzi allows you to configure some of these options.
JVM configuration
Use the jvmOptions property to configure supported options for the JVM on which the component is running.
Supported JVM options help to optimize performance for different platforms and architectures.
Configuring JVM options
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
jvmOptionsproperty in theKafka,KafkaConnect,KafkaConnectS2I,KafkaMirrorMaker, orKafkaBridgeresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... jvmOptions: "-Xmx": "8g" "-Xms": "8g" # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.19. Container images
Strimzi allows you to configure container images which will be used for its components. Overriding container images is recommended only in special situations, where you need to use a different container registry. For example, because your network does not allow access to the container repository used by Strimzi. In such a case, you should either copy the Strimzi images or build them from the source. If the configured image is not compatible with Strimzi images, it might not work properly.
Container image configurations
Use the image property to specify which container image to use.
|
Warning
|
Overriding container images is recommended only in special situations. |
Configuring container images
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
imageproperty in theKafkaresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... image: my-org/my-image:latest # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.20. TLS sidecar
A sidecar is a container that runs in a pod but serves a supporting purpose. In Strimzi, the TLS sidecar uses TLS to encrypt and decrypt all communication between the various components and ZooKeeper.
The TLS sidecar is used in:
-
Entity Operator
-
Cruise Control
TLS sidecar configuration
The TLS sidecar can be configured using the tlsSidecar property in:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper -
Kafka.spec.entityOperator
The TLS sidecar supports the following additional options:
-
image -
resources -
logLevel -
readinessProbe -
livenessProbe
The resources property can be used to specify the memory and CPU resources allocated for the TLS sidecar.
The image property can be used to configure the container image which will be used.
For more details about configuring custom container images, see Container images.
The logLevel property is used to specify the logging level.
Following logging levels are supported:
-
emerg
-
alert
-
crit
-
err
-
warning
-
notice
-
info
-
debug
The default value is notice.
For more information about configuring the readinessProbe and livenessProbe properties for the healthchecks, see Healthcheck configurations.
Example of TLS sidecar configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
tlsSidecar:
image: my-org/my-image:latest
resources:
requests:
cpu: 200m
memory: 64Mi
limits:
cpu: 500m
memory: 128Mi
logLevel: debug
readinessProbe:
initialDelaySeconds: 15
timeoutSeconds: 5
livenessProbe:
initialDelaySeconds: 15
timeoutSeconds: 5
# ...
zookeeper:
# ...Configuring TLS sidecar
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
tlsSidecarproperty in theKafkaresource. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... zookeeper: # ... entityOperator: # ... tlsSidecar: resources: requests: cpu: 200m memory: 64Mi limits: cpu: 500m memory: 128Mi # ... cruiseControl: # ... tlsSidecar: resources: requests: cpu: 200m memory: 64Mi limits: cpu: 500m memory: 128Mi # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.21. Configuring pod scheduling
|
Important
|
When two applications are scheduled to the same Kubernetes node, both applications might use the same resources like disk I/O and impact performance. That can lead to performance degradation. Scheduling Kafka pods in a way that avoids sharing nodes with other critical workloads, using the right nodes or dedicated a set of nodes only for Kafka are the best ways how to avoid such problems. |
Scheduling pods based on other applications
Avoid critical applications to share the node
Pod anti-affinity can be used to ensure that critical applications are never scheduled on the same disk. When running Kafka cluster, it is recommended to use pod anti-affinity to ensure that the Kafka brokers do not share the nodes with other workloads like databases.
Affinity
Affinity can be configured using the affinity property in following resources:
-
Kafka.spec.kafka.template.pod -
Kafka.spec.zookeeper.template.pod -
Kafka.spec.entityOperator.template.pod -
KafkaConnect.spec.template.pod -
KafkaConnectS2I.spec.template.pod -
KafkaBridge.spec.template.pod
The affinity configuration can include different types of affinity:
-
Pod affinity and anti-affinity
-
Node affinity
The format of the affinity property follows the Kubernetes specification.
For more details, see the Kubernetes node and pod affinity documentation.
Configuring pod anti-affinity in Kafka components
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
affinityproperty in the resource specifying the cluster deployment. Use labels to specify the pods which should not be scheduled on the same nodes. ThetopologyKeyshould be set tokubernetes.io/hostnameto specify that the selected pods should not be scheduled on nodes with the same hostname. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... template: pod: affinity: podAntiAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: application operator: In values: - postgresql - mongodb topologyKey: "kubernetes.io/hostname" # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Scheduling pods to specific nodes
Node scheduling
The Kubernetes cluster usually consists of many different types of worker nodes. Some are optimized for CPU heavy workloads, some for memory, while other might be optimized for storage (fast local SSDs) or network. Using different nodes helps to optimize both costs and performance. To achieve the best possible performance, it is important to allow scheduling of Strimzi components to use the right nodes.
Kubernetes uses node affinity to schedule workloads onto specific nodes.
Node affinity allows you to create a scheduling constraint for the node on which the pod will be scheduled.
The constraint is specified as a label selector.
You can specify the label using either the built-in node label like beta.kubernetes.io/instance-type or custom labels to select the right node.
Affinity
Affinity can be configured using the affinity property in following resources:
-
Kafka.spec.kafka.template.pod -
Kafka.spec.zookeeper.template.pod -
Kafka.spec.entityOperator.template.pod -
KafkaConnect.spec.template.pod -
KafkaConnectS2I.spec.template.pod -
KafkaBridge.spec.template.pod
The affinity configuration can include different types of affinity:
-
Pod affinity and anti-affinity
-
Node affinity
The format of the affinity property follows the Kubernetes specification.
For more details, see the Kubernetes node and pod affinity documentation.
Configuring node affinity in Kafka components
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Label the nodes where Strimzi components should be scheduled.
This can be done using
kubectl label:kubectl label node your-node node-type=fast-networkAlternatively, some of the existing labels might be reused.
-
Edit the
affinityproperty in the resource specifying the cluster deployment. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... template: pod: affinity: nodeAffinity: requiredDuringSchedulingIgnoredDuringExecution: nodeSelectorTerms: - matchExpressions: - key: node-type operator: In values: - fast-network # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Using dedicated nodes
Dedicated nodes
Cluster administrators can mark selected Kubernetes nodes as tainted. Nodes with taints are excluded from regular scheduling and normal pods will not be scheduled to run on them. Only services which can tolerate the taint set on the node can be scheduled on it. The only other services running on such nodes will be system services such as log collectors or software defined networks.
Taints can be used to create dedicated nodes. Running Kafka and its components on dedicated nodes can have many advantages. There will be no other applications running on the same nodes which could cause disturbance or consume the resources needed for Kafka. That can lead to improved performance and stability.
To schedule Kafka pods on the dedicated nodes, configure node affinity and tolerations.
Affinity
Affinity can be configured using the affinity property in following resources:
-
Kafka.spec.kafka.template.pod -
Kafka.spec.zookeeper.template.pod -
Kafka.spec.entityOperator.template.pod -
KafkaConnect.spec.template.pod -
KafkaConnectS2I.spec.template.pod -
KafkaBridge.spec.template.pod
The affinity configuration can include different types of affinity:
-
Pod affinity and anti-affinity
-
Node affinity
The format of the affinity property follows the Kubernetes specification.
For more details, see the Kubernetes node and pod affinity documentation.
Tolerations
Tolerations can be configured using the tolerations property in following resources:
-
Kafka.spec.kafka.template.pod -
Kafka.spec.zookeeper.template.pod -
Kafka.spec.entityOperator.template.pod -
KafkaConnect.spec.template.pod -
KafkaConnectS2I.spec.template.pod -
KafkaBridge.spec.template.pod
The format of the tolerations property follows the Kubernetes specification.
For more details, see the Kubernetes taints and tolerations.
Setting up dedicated nodes and scheduling pods on them
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Select the nodes which should be used as dedicated.
-
Make sure there are no workloads scheduled on these nodes.
-
Set the taints on the selected nodes:
This can be done using
kubectl taint:kubectl taint node your-node dedicated=Kafka:NoSchedule -
Additionally, add a label to the selected nodes as well.
This can be done using
kubectl label:kubectl label node your-node dedicated=Kafka -
Edit the
affinityandtolerationsproperties in the resource specifying the cluster deployment. For example:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... template: pod: tolerations: - key: "dedicated" operator: "Equal" value: "Kafka" effect: "NoSchedule" affinity: nodeAffinity: requiredDuringSchedulingIgnoredDuringExecution: nodeSelectorTerms: - matchExpressions: - key: dedicated operator: In values: - Kafka # ... zookeeper: # ... -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
2.1.22. Kafka Exporter
You can configure the Kafka resource to automatically deploy Kafka Exporter in your cluster.
Kafka Exporter extracts data for analysis as Prometheus metrics, primarily data relating to offsets, consumer groups, consumer lag and topics.
For information on setting up Kafka Exporter and why it is important to monitor consumer lag for performance, see Kafka Exporter in the Deploying Strimzi guide.
2.1.23. Performing a rolling update of a Kafka cluster
This procedure describes how to manually trigger a rolling update of an existing Kafka cluster by using a Kubernetes annotation.
Prerequisites
See the Deploying Strimzi guide for instructions on running a:
Procedure
-
Find the name of the
StatefulSetthat controls the Kafka pods you want to manually update.For example, if your Kafka cluster is named my-cluster, the corresponding
StatefulSetis named my-cluster-kafka. -
Annotate the
StatefulSetresource in Kubernetes. For example, usingkubectl annotate:kubectl annotate statefulset cluster-name-kafka strimzi.io/manual-rolling-update=true -
Wait for the next reconciliation to occur (every two minutes by default). A rolling update of all pods within the annotated
StatefulSetis triggered, as long as the annotation was detected by the reconciliation process. When the rolling update of all the pods is complete, the annotation is removed from theStatefulSet.
2.1.24. Performing a rolling update of a ZooKeeper cluster
This procedure describes how to manually trigger a rolling update of an existing ZooKeeper cluster by using a Kubernetes annotation.
Prerequisites
See the Deploying Strimzi guide for instructions on running a:
Procedure
-
Find the name of the
StatefulSetthat controls the ZooKeeper pods you want to manually update.For example, if your Kafka cluster is named my-cluster, the corresponding
StatefulSetis named my-cluster-zookeeper. -
Annotate the
StatefulSetresource in Kubernetes. For example, usingkubectl annotate:kubectl annotate statefulset cluster-name-zookeeper strimzi.io/manual-rolling-update=true -
Wait for the next reconciliation to occur (every two minutes by default). A rolling update of all pods within the annotated
StatefulSetis triggered, as long as the annotation was detected by the reconciliation process. When the rolling update of all the pods is complete, the annotation is removed from theStatefulSet.
2.1.25. Scaling clusters
Scaling Kafka clusters
Adding brokers to a cluster
The primary way of increasing throughput for a topic is to increase the number of partitions for that topic. That works because the extra partitions allow the load of the topic to be shared between the different brokers in the cluster. However, in situations where every broker is constrained by a particular resource (typically I/O) using more partitions will not result in increased throughput. Instead, you need to add brokers to the cluster.
When you add an extra broker to the cluster, Kafka does not assign any partitions to it automatically. You must decide which partitions to move from the existing brokers to the new broker.
Once the partitions have been redistributed between all the brokers, the resource utilization of each broker should be reduced.
Removing brokers from a cluster
Because Strimzi uses StatefulSets to manage broker pods, you cannot remove any pod from the cluster.
You can only remove one or more of the highest numbered pods from the cluster.
For example, in a cluster of 12 brokers the pods are named cluster-name-kafka-0 up to cluster-name-kafka-11.
If you decide to scale down by one broker, the cluster-name-kafka-11 will be removed.
Before you remove a broker from a cluster, ensure that it is not assigned to any partitions. You should also decide which of the remaining brokers will be responsible for each of the partitions on the broker being decommissioned. Once the broker has no assigned partitions, you can scale the cluster down safely.
Partition reassignment
The Topic Operator does not currently support reassigning replicas to different brokers, so it is necessary to connect directly to broker pods to reassign replicas to brokers.
Within a broker pod, the kafka-reassign-partitions.sh utility allows you to reassign partitions to different brokers.
It has three different modes:
--generate-
Takes a set of topics and brokers and generates a reassignment JSON file which will result in the partitions of those topics being assigned to those brokers. Because this operates on whole topics, it cannot be used when you just need to reassign some of the partitions of some topics.
--execute-
Takes a reassignment JSON file and applies it to the partitions and brokers in the cluster. Brokers that gain partitions as a result become followers of the partition leader. For a given partition, once the new broker has caught up and joined the ISR (in-sync replicas) the old broker will stop being a follower and will delete its replica.
--verify-
Using the same reassignment JSON file as the
--executestep,--verifychecks whether all of the partitions in the file have been moved to their intended brokers. If the reassignment is complete, --verify also removes any throttles that are in effect. Unless removed, throttles will continue to affect the cluster even after the reassignment has finished.
It is only possible to have one reassignment running in a cluster at any given time, and it is not possible to cancel a running reassignment.
If you need to cancel a reassignment, wait for it to complete and then perform another reassignment to revert the effects of the first reassignment.
The kafka-reassign-partitions.sh will print the reassignment JSON for this reversion as part of its output.
Very large reassignments should be broken down into a number of smaller reassignments in case there is a need to stop in-progress reassignment.
Reassignment JSON file
The reassignment JSON file has a specific structure:
{
"version": 1,
"partitions": [
<PartitionObjects>
]
}Where <PartitionObjects> is a comma-separated list of objects like:
{
"topic": <TopicName>,
"partition": <Partition>,
"replicas": [ <AssignedBrokerIds> ]
}|
Note
|
Although Kafka also supports a "log_dirs" property this should not be used in Strimzi.
|
The following is an example reassignment JSON file that assigns topic topic-a, partition 4 to brokers 2, 4 and 7, and topic topic-b partition 2 to brokers 1, 5 and 7:
{
"version": 1,
"partitions": [
{
"topic": "topic-a",
"partition": 4,
"replicas": [2,4,7]
},
{
"topic": "topic-b",
"partition": 2,
"replicas": [1,5,7]
}
]
}Partitions not included in the JSON are not changed.
Reassigning partitions between JBOD volumes
When using JBOD storage in your Kafka cluster, you can choose to reassign the partitions between specific volumes and their log directories (each volume has a single log directory).
To reassign a partition to a specific volume, add the log_dirs option to <PartitionObjects> in the reassignment JSON file.
{
"topic": <TopicName>,
"partition": <Partition>,
"replicas": [ <AssignedBrokerIds> ],
"log_dirs": [ <AssignedLogDirs> ]
}The log_dirs object should contain the same number of log directories as the number of replicas specified in the replicas object.
The value should be either an absolute path to the log directory, or the any keyword.
For example:
{
"topic": "topic-a",
"partition": 4,
"replicas": [2,4,7].
"log_dirs": [ "/var/lib/kafka/data-0/kafka-log2", "/var/lib/kafka/data-0/kafka-log4", "/var/lib/kafka/data-0/kafka-log7" ]
}Generating reassignment JSON files
This procedure describes how to generate a reassignment JSON file that reassigns all the partitions for a given set of topics using the kafka-reassign-partitions.sh tool.
Prerequisites
-
A running Cluster Operator
-
A
Kafkaresource -
A set of topics to reassign the partitions of
Procedure
-
Prepare a JSON file named
topics.jsonthat lists the topics to move. It must have the following structure:{ "version": 1, "topics": [ <TopicObjects> ] }where <TopicObjects> is a comma-separated list of objects like:
{ "topic": <TopicName> }For example if you want to reassign all the partitions of
topic-aandtopic-b, you would need to prepare atopics.jsonfile like this:{ "version": 1, "topics": [ { "topic": "topic-a"}, { "topic": "topic-b"} ] } -
Copy the
topics.jsonfile to one of the broker pods:cat topics.json | kubectl exec -c kafka <BrokerPod> -i -- \ /bin/bash -c \ 'cat > /tmp/topics.json' -
Use the
kafka-reassign-partitions.shcommand to generate the reassignment JSON.kubectl exec <BrokerPod> -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --topics-to-move-json-file /tmp/topics.json \ --broker-list <BrokerList> \ --generateFor example, to move all the partitions of
topic-aandtopic-bto brokers4and7kubectl exec <BrokerPod> -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --topics-to-move-json-file /tmp/topics.json \ --broker-list 4,7 \ --generate
Creating reassignment JSON files manually
You can manually create the reassignment JSON file if you want to move specific partitions.
Reassignment throttles
Partition reassignment can be a slow process because it involves transferring large amounts of data between brokers. To avoid a detrimental impact on clients, you can throttle the reassignment process. This might cause the reassignment to take longer to complete.
-
If the throttle is too low then the newly assigned brokers will not be able to keep up with records being published and the reassignment will never complete.
-
If the throttle is too high then clients will be impacted.
For example, for producers, this could manifest as higher than normal latency waiting for acknowledgement. For consumers, this could manifest as a drop in throughput caused by higher latency between polls.
Scaling up a Kafka cluster
This procedure describes how to increase the number of brokers in a Kafka cluster.
Prerequisites
-
An existing Kafka cluster.
-
A reassignment JSON file named
reassignment.jsonthat describes how partitions should be reassigned to brokers in the enlarged cluster.
Procedure
-
Add as many new brokers as you need by increasing the
Kafka.spec.kafka.replicasconfiguration option. -
Verify that the new broker pods have started.
-
Copy the
reassignment.jsonfile to the broker pod on which you will later execute the commands:cat reassignment.json | \ kubectl exec broker-pod -c kafka -i -- /bin/bash -c \ 'cat > /tmp/reassignment.json'For example:
cat reassignment.json | \ kubectl exec my-cluster-kafka-0 -c kafka -i -- /bin/bash -c \ 'cat > /tmp/reassignment.json' -
Execute the partition reassignment using the
kafka-reassign-partitions.shcommand line tool from the same broker pod.kubectl exec broker-pod -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --executeIf you are going to throttle replication you can also pass the
--throttleoption with an inter-broker throttled rate in bytes per second. For example:kubectl exec my-cluster-kafka-0 -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --throttle 5000000 \ --executeThis command will print out two reassignment JSON objects. The first records the current assignment for the partitions being moved. You should save this to a local file (not a file in the pod) in case you need to revert the reassignment later on. The second JSON object is the target reassignment you have passed in your reassignment JSON file.
-
If you need to change the throttle during reassignment you can use the same command line with a different throttled rate. For example:
kubectl exec my-cluster-kafka-0 -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --throttle 10000000 \ --execute -
Periodically verify whether the reassignment has completed using the
kafka-reassign-partitions.shcommand line tool from any of the broker pods. This is the same command as the previous step but with the--verifyoption instead of the--executeoption.kubectl exec broker-pod -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --verifyFor example,
kubectl exec my-cluster-kafka-0 -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --verify -
The reassignment has finished when the
--verifycommand reports each of the partitions being moved as completed successfully. This final--verifywill also have the effect of removing any reassignment throttles. You can now delete the revert file if you saved the JSON for reverting the assignment to their original brokers.
Scaling down a Kafka cluster
Additional resources
This procedure describes how to decrease the number of brokers in a Kafka cluster.
Prerequisites
-
An existing Kafka cluster.
-
A reassignment JSON file named
reassignment.jsondescribing how partitions should be reassigned to brokers in the cluster once the broker(s) in the highest numberedPod(s)have been removed.
Procedure
-
Copy the
reassignment.jsonfile to the broker pod on which you will later execute the commands:cat reassignment.json | \ kubectl exec broker-pod -c kafka -i -- /bin/bash -c \ 'cat > /tmp/reassignment.json'For example:
cat reassignment.json | \ kubectl exec my-cluster-kafka-0 -c kafka -i -- /bin/bash -c \ 'cat > /tmp/reassignment.json' -
Execute the partition reassignment using the
kafka-reassign-partitions.shcommand line tool from the same broker pod.kubectl exec broker-pod -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --executeIf you are going to throttle replication you can also pass the
--throttleoption with an inter-broker throttled rate in bytes per second. For example:kubectl exec my-cluster-kafka-0 -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --throttle 5000000 \ --executeThis command will print out two reassignment JSON objects. The first records the current assignment for the partitions being moved. You should save this to a local file (not a file in the pod) in case you need to revert the reassignment later on. The second JSON object is the target reassignment you have passed in your reassignment JSON file.
-
If you need to change the throttle during reassignment you can use the same command line with a different throttled rate. For example:
kubectl exec my-cluster-kafka-0 -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --throttle 10000000 \ --execute -
Periodically verify whether the reassignment has completed using the
kafka-reassign-partitions.shcommand line tool from any of the broker pods. This is the same command as the previous step but with the--verifyoption instead of the--executeoption.kubectl exec broker-pod -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --verifyFor example,
kubectl exec my-cluster-kafka-0 -c kafka -it -- \ bin/kafka-reassign-partitions.sh --bootstrap-server localhost:9092 \ --reassignment-json-file /tmp/reassignment.json \ --verify -
The reassignment has finished when the
--verifycommand reports each of the partitions being moved as completed successfully. This final--verifywill also have the effect of removing any reassignment throttles. You can now delete the revert file if you saved the JSON for reverting the assignment to their original brokers. -
Once all the partition reassignments have finished, the broker(s) being removed should not have responsibility for any of the partitions in the cluster. You can verify this by checking that the broker’s data log directory does not contain any live partition logs. If the log directory on the broker contains a directory that does not match the extended regular expression
[a-zA-Z0-9.-]+\.[a-z0-9]+-delete$then the broker still has live partitions and it should not be stopped.You can check this by executing the command:
kubectl exec my-cluster-kafka-0 -c kafka -it -- \ /bin/bash -c \ "ls -l /var/lib/kafka/kafka-log_<N>_ | grep -E '^d' | grep -vE '[a-zA-Z0-9.-]+\.[a-z0-9]+-delete$'"where N is the number of the
Pod(s)being deleted.If the above command prints any output then the broker still has live partitions. In this case, either the reassignment has not finished, or the reassignment JSON file was incorrect.
-
Once you have confirmed that the broker has no live partitions you can edit the
Kafka.spec.kafka.replicasof yourKafkaresource, which will scale down theStatefulSet, deleting the highest numbered brokerPod(s).
2.1.26. Deleting Kafka nodes manually
Additional resources
This procedure describes how to delete an existing Kafka node by using a Kubernetes annotation.
Deleting a Kafka node consists of deleting both the Pod on which the Kafka broker is running and the related PersistentVolumeClaim (if the cluster was deployed with persistent storage).
After deletion, the Pod and its related PersistentVolumeClaim are recreated automatically.
|
Warning
|
Deleting a PersistentVolumeClaim can cause permanent data loss. The following procedure should only be performed if you have encountered storage issues.
|
Prerequisites
See the Deploying Strimzi guide for instructions on running a:
Procedure
-
Find the name of the
Podthat you want to delete.For example, if the cluster is named cluster-name, the pods are named cluster-name-kafka-index, where index starts at zero and ends at the total number of replicas.
-
Annotate the
Podresource in Kubernetes.Use
kubectl annotate:kubectl annotate pod cluster-name-kafka-index strimzi.io/delete-pod-and-pvc=true -
Wait for the next reconciliation, when the annotated pod with the underlying persistent volume claim will be deleted and then recreated.
2.1.27. Deleting ZooKeeper nodes manually
This procedure describes how to delete an existing ZooKeeper node by using a Kubernetes annotation.
Deleting a ZooKeeper node consists of deleting both the Pod on which ZooKeeper is running and the related PersistentVolumeClaim (if the cluster was deployed with persistent storage).
After deletion, the Pod and its related PersistentVolumeClaim are recreated automatically.
|
Warning
|
Deleting a PersistentVolumeClaim can cause permanent data loss. The following procedure should only be performed if you have encountered storage issues.
|
Prerequisites
See the Deploying Strimzi guide for instructions on running a:
Procedure
-
Find the name of the
Podthat you want to delete.For example, if the cluster is named cluster-name, the pods are named cluster-name-zookeeper-index, where index starts at zero and ends at the total number of replicas.
-
Annotate the
Podresource in Kubernetes.Use
kubectl annotate:kubectl annotate pod cluster-name-zookeeper-index strimzi.io/delete-pod-and-pvc=true -
Wait for the next reconciliation, when the annotated pod with the underlying persistent volume claim will be deleted and then recreated.
2.1.28. Maintenance time windows for rolling updates
Maintenance time windows allow you to schedule certain rolling updates of your Kafka and ZooKeeper clusters to start at a convenient time.
Maintenance time windows overview
In most cases, the Cluster Operator only updates your Kafka or ZooKeeper clusters in response to changes to the corresponding Kafka resource.
This enables you to plan when to apply changes to a Kafka resource to minimize the impact on Kafka client applications.
However, some updates to your Kafka and ZooKeeper clusters can happen without any corresponding change to the Kafka resource.
For example, the Cluster Operator will need to perform a rolling restart if a CA (Certificate Authority) certificate that it manages is close to expiry.
While a rolling restart of the pods should not affect availability of the service (assuming correct broker and topic configurations), it could affect performance of the Kafka client applications. Maintenance time windows allow you to schedule such spontaneous rolling updates of your Kafka and ZooKeeper clusters to start at a convenient time. If maintenance time windows are not configured for a cluster then it is possible that such spontaneous rolling updates will happen at an inconvenient time, such as during a predictable period of high load.
Maintenance time window definition
You configure maintenance time windows by entering an array of strings in the Kafka.spec.maintenanceTimeWindows property.
Each string is a cron expression interpreted as being in UTC (Coordinated Universal Time, which for practical purposes is the same as Greenwich Mean Time).
The following example configures a single maintenance time window that starts at midnight and ends at 01:59am (UTC), on Sundays, Mondays, Tuesdays, Wednesdays, and Thursdays:
# ...
maintenanceTimeWindows:
- "* * 0-1 ? * SUN,MON,TUE,WED,THU *"
# ...In practice, maintenance windows should be set in conjunction with the Kafka.spec.clusterCa.renewalDays and Kafka.spec.clientsCa.renewalDays properties of the Kafka resource, to ensure that the necessary CA certificate renewal can be completed in the configured maintenance time windows.
|
Note
|
Strimzi does not schedule maintenance operations exactly according to the given windows. Instead, for each reconciliation, it checks whether a maintenance window is currently "open". This means that the start of maintenance operations within a given time window can be delayed by up to the Cluster Operator reconciliation interval. Maintenance time windows must therefore be at least this long. |
Additional resources
-
For more information about the Cluster Operator configuration, see Cluster Operator configuration.
Configuring a maintenance time window
You can configure a maintenance time window for rolling updates triggered by supported processes.
Prerequisites
-
A Kubernetes cluster.
-
The Cluster Operator is running.
Procedure
-
Add or edit the
maintenanceTimeWindowsproperty in theKafkaresource. For example to allow maintenance between 0800 and 1059 and between 1400 and 1559 you would set themaintenanceTimeWindowsas shown below:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka: # ... zookeeper: # ... maintenanceTimeWindows: - "* * 8-10 * * ?" - "* * 14-15 * * ?" -
Create or update the resource.
This can be done using
kubectl apply:kubectl apply -f your-file
Additional resources
-
Performing a rolling update of a Kafka cluster, see Performing a rolling update of a Kafka cluster
-
Performing a rolling update of a ZooKeeper cluster, see Performing a rolling update of a ZooKeeper cluster
2.1.29. Renewing CA certificates manually
Cluster and clients CA certificates auto-renew at the start of their respective certificate renewal periods.
If Kafka.spec.clusterCa.generateCertificateAuthority and Kafka.spec.clientsCa.generateCertificateAuthority are set to false,
the CA certificates do not auto-renew.
You can manually renew one or both of these certificates before the certificate renewal period starts. You might do this for security reasons, or if you have changed the renewal or validity periods for the certificates.
A renewed certificate uses the same private key as the old certificate.
Prerequisites
-
The Cluster Operator is running.
-
A Kafka cluster in which CA certificates and private keys are installed.
Procedure
-
Apply the
strimzi.io/force-renewannotation to theSecretthat contains the CA certificate that you want to renew.Table 1. Annotation for the Secret that forces renewal of certificates Certificate Secret Annotate command Cluster CA
KAFKA-CLUSTER-NAME-cluster-ca-cert
kubectl annotate secret KAFKA-CLUSTER-NAME-cluster-ca-cert strimzi.io/force-renew=trueClients CA
KAFKA-CLUSTER-NAME-clients-ca-cert
kubectl annotate secret KAFKA-CLUSTER-NAME-clients-ca-cert strimzi.io/force-renew=trueAt the next reconciliation the Cluster Operator will generate a new CA certificate for the
Secretthat you annotated. If maintenance time windows are configured, the Cluster Operator will generate the new CA certificate at the first reconciliation within the next maintenance time window.Client applications must reload the cluster and clients CA certificates that were renewed by the Cluster Operator.
-
Check the period the CA certificate is valid:
For example, using an
opensslcommand:kubectl get secret CA-CERTIFICATE-SECRET -o 'jsonpath={.data.CA-CERTIFICATE}' | base64 -d | openssl x509 -subject -issuer -startdate -enddate -nooutCA-CERTIFICATE-SECRET is the name of the
Secret, which isKAFKA-CLUSTER-NAME-cluster-ca-certfor the cluster CA certificate andKAFKA-CLUSTER-NAME-clients-ca-certfor the clients CA certificate.CA-CERTIFICATE is the name of the CA certificate, such as
jsonpath={.data.ca\.crt}.The command returns a
notBeforeandnotAfterdate, which is the validity period for the CA certificate.For example, for a cluster CA certificate:
subject=O = io.strimzi, CN = cluster-ca v0 issuer=O = io.strimzi, CN = cluster-ca v0 notBefore=Jun 30 09:43:54 2020 GMT notAfter=Jun 30 09:43:54 2021 GMT -
Delete old certificates from the Secret.
When components are using the new certificates, older certificates might still be active. Delete the old certificates to remove any potential security risk.
Additional resources
2.1.30. Replacing private keys
You can replace the private keys used by the cluster CA and clients CA certificates. When a private key is replaced, the Cluster Operator generates a new CA certificate for the new private key.
Prerequisites
-
The Cluster Operator is running.
-
A Kafka cluster in which CA certificates and private keys are installed.
Procedure
-
Apply the
strimzi.io/force-replaceannotation to theSecretthat contains the private key that you want to renew.Table 2. Commands for replacing private keys Private key for Secret Annotate command Cluster CA
<cluster-name>-cluster-ca
kubectl annotate secret <cluster-name>-cluster-ca strimzi.io/force-replace=trueClients CA
<cluster-name>-clients-ca
kubectl annotate secret <cluster-name>-clients-ca strimzi.io/force-replace=true
At the next reconciliation the Cluster Operator will:
-
Generate a new private key for the
Secretthat you annotated -
Generate a new CA certificate
If maintenance time windows are configured, the Cluster Operator will generate the new private key and CA certificate at the first reconciliation within the next maintenance time window.
Client applications must reload the cluster and clients CA certificates that were renewed by the Cluster Operator.
Additional resources
2.1.31. List of resources created as part of Kafka cluster
The following resources are created by the Cluster Operator in the Kubernetes cluster:
Shared resources
cluster-name-cluster-ca-
Secret with the Cluster CA used to encrypt the cluster communication.
cluster-name-cluster-ca-cert-
Secret with the Cluster CA public key. This key can be used to verify the identity of the Kafka brokers.
cluster-name-clients-ca-
Secret with the Clients CA private key used to sign user certiticates
cluster-name-clients-ca-cert-
Secret with the Clients CA public key. This key can be used to verify the identity of the Kafka users.
cluster-name-cluster-operator-certs-
Secret with Cluster operators keys for communication with Kafka and ZooKeeper.
Zookeeper nodes
cluster-name-zookeeper-
StatefulSet which is in charge of managing the ZooKeeper node pods.
cluster-name-zookeeper-idx-
Pods created by the Zookeeper StatefulSet.
cluster-name-zookeeper-nodes-
Headless Service needed to have DNS resolve the ZooKeeper pods IP addresses directly.
cluster-name-zookeeper-client-
Service used by Kafka brokers to connect to ZooKeeper nodes as clients.
cluster-name-zookeeper-config-
ConfigMap that contains the ZooKeeper ancillary configuration, and is mounted as a volume by the ZooKeeper node pods.
cluster-name-zookeeper-nodes-
Secret with ZooKeeper node keys.
cluster-name-zookeeper-
Service account used by the Zookeeper nodes.
cluster-name-zookeeper-
Pod Disruption Budget configured for the ZooKeeper nodes.
cluster-name-network-policy-zookeeper-
Network policy managing access to the ZooKeeper services.
data-cluster-name-zookeeper-idx-
Persistent Volume Claim for the volume used for storing data for the ZooKeeper node pod
idx. This resource will be created only if persistent storage is selected for provisioning persistent volumes to store data.
Kafka brokers
cluster-name-kafka-
StatefulSet which is in charge of managing the Kafka broker pods.
cluster-name-kafka-idx-
Pods created by the Kafka StatefulSet.
cluster-name-kafka-brokers-
Service needed to have DNS resolve the Kafka broker pods IP addresses directly.
cluster-name-kafka-bootstrap-
Service can be used as bootstrap servers for Kafka clients.
cluster-name-kafka-external-bootstrap-
Bootstrap service for clients connecting from outside of the Kubernetes cluster. This resource will be created only when external listener is enabled.
cluster-name-kafka-pod-id-
Service used to route traffic from outside of the Kubernetes cluster to individual pods. This resource will be created only when external listener is enabled.
cluster-name-kafka-external-bootstrap-
Bootstrap route for clients connecting from outside of the Kubernetes cluster. This resource will be created only when external listener is enabled and set to type
route. cluster-name-kafka-pod-id-
Route for traffic from outside of the Kubernetes cluster to individual pods. This resource will be created only when external listener is enabled and set to type
route. cluster-name-kafka-config-
ConfigMap which contains the Kafka ancillary configuration and is mounted as a volume by the Kafka broker pods.
cluster-name-kafka-brokers-
Secret with Kafka broker keys.
cluster-name-kafka-
Service account used by the Kafka brokers.
cluster-name-kafka-
Pod Disruption Budget configured for the Kafka brokers.
cluster-name-network-policy-kafka-
Network policy managing access to the Kafka services.
strimzi-namespace-name-cluster-name-kafka-init-
Cluster role binding used by the Kafka brokers.
cluster-name-jmx-
Secret with JMX username and password used to secure the Kafka broker port. This resource will be created only when JMX is enabled in Kafka.
data-cluster-name-kafka-idx-
Persistent Volume Claim for the volume used for storing data for the Kafka broker pod
idx. This resource will be created only if persistent storage is selected for provisioning persistent volumes to store data. data-id-cluster-name-kafka-idx-
Persistent Volume Claim for the volume
idused for storing data for the Kafka broker podidx. This resource is only created if persistent storage is selected for JBOD volumes when provisioning persistent volumes to store data.
Entity Operator
These resources are only created if the Entity Operator is deployed using the Cluster Operator.
cluster-name-entity-operator-
Deployment with Topic and User Operators.
cluster-name-entity-operator-random-string-
Pod created by the Entity Operator deployment.
cluster-name-entity-topic-operator-config-
ConfigMap with ancillary configuration for Topic Operators.
cluster-name-entity-user-operator-config-
ConfigMap with ancillary configuration for User Operators.
cluster-name-entity-operator-certs-
Secret with Entity Operator keys for communication with Kafka and ZooKeeper.
cluster-name-entity-operator-
Service account used by the Entity Operator.
strimzi-cluster-name-topic-operator-
Role binding used by the Entity Operator.
strimzi-cluster-name-user-operator-
Role binding used by the Entity Operator.
Kafka Exporter
These resources are only created if the Kafka Exporter is deployed using the Cluster Operator.
cluster-name-kafka-exporter-
Deployment with Kafka Exporter.
cluster-name-kafka-exporter-random-string-
Pod created by the Kafka Exporter deployment.
cluster-name-kafka-exporter-
Service used to collect consumer lag metrics.
cluster-name-kafka-exporter-
Service account used by the Kafka Exporter.
Cruise Control
These resources are only created only if Cruise Control was deployed using the Cluster Operator.
cluster-name-cruise-control-
Deployment with Cruise Control.
cluster-name-cruise-control-random-string-
Pod created by the Cruise Control deployment.
cluster-name-cruise-control-config-
ConfigMap that contains the Cruise Control ancillary configuration, and is mounted as a volume by the Cruise Control pods.
cluster-name-cruise-control-certs-
Secret with Cruise Control keys for communication with Kafka and ZooKeeper.
cluster-name-cruise-control-
Service used to communicate with Cruise Control.
cluster-name-cruise-control-
Service account used by Cruise Control.
cluster-name-network-policy-cruise-control-
Network policy managing access to the Cruise Control service.
JMXTrans
These resources are only created if JMXTrans is deployed using the Cluster Operator.
cluster-name-jmxtrans-
Deployment with JMXTrans.
cluster-name-jmxtrans-random-string-
Pod created by the JMXTrans deployment.
cluster-name-jmxtrans-config-
ConfigMap that contains the JMXTrans ancillary configuration, and is mounted as a volume by the JMXTrans pods.
cluster-name-jmxtrans-
Service account used by JMXTrans.
2.2. Kafka Connect/S2I cluster configuration
This section describes how to configure a Kafka Connect or Kafka Connect with Source-to-Image (S2I) deployment in your Strimzi cluster.
Kafka Connect is an integration toolkit for streaming data between Kafka brokers and other systems using Connector plugins.
Kafka Connect provides a framework for integrating Kafka with an external data source or target, such as a database, for import or export of data using connectors.
Connectors are plugins that provide the connection configuration needed.
If you are using Kafka Connect, you configure either the KafkaConnect or the KafkaConnectS2I resource.
Use the KafkaConnectS2I resource if you are using the Source-to-Image (S2I) framework to deploy Kafka Connect.
-
The full schema of the
KafkaConnectresource is described inKafkaConnectschema reference. -
The full schema of the
KafkaConnectS2Iresource is described inKafkaConnectS2Ischema reference.
Additional resources
2.2.1. Configuring Kafka Connect
Use Kafka Connect to set up external data connections to your Kafka cluster.
Use the properties of the KafkaConnect or KafkaConnectS2I resource to configure your Kafka Connect deployment.
The example shown in this procedure is for the KafkaConnect resource, but the properties are the same for the KafkaConnectS2I resource.
Kafka connector configuration
KafkaConnector resources allow you to create and manage connector instances for Kafka Connect in a Kubernetes-native way.
In the configuration, you enable KafkaConnectors for a Kafka Connect cluster by adding the strimzi.io/use-connector-resources annotation.
You can also specify external configuration for Kafka Connect connectors through the externalConfiguration property.
Connectors are created, reconfigured, and deleted using the Kafka Connect HTTP REST interface, or by using KafkaConnectors.
For more information on these methods, see Creating and managing connectors in the Deploying Strimzi guide.
The connector configuration is passed to Kafka Connect as part of an HTTP request and stored within Kafka itself. ConfigMaps and Secrets are standard Kubernetes resources used for storing configurations and confidential data. You can use ConfigMaps and Secrets to configure certain elements of a connector. You can then reference the configuration values in HTTP REST commands (this keeps the configuration separate and more secure, if needed). This method applies especially to confidential data, such as usernames, passwords, or certificates.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
See the Deploying Strimzi guide for instructions on running a:
Procedure
-
Edit the
specproperties for theKafkaConnectorKafkaConnectS2Iresource.The properties you can configure are shown in this example configuration:
apiVersion: kafka.strimzi.io/v1beta1 kind: KafkaConnect (1) metadata: name: my-connect-cluster annotations: strimzi.io/use-connector-resources: "true" (2) spec: replicas: 3 (3) authentication: (4) type: tls certificateAndKey: certificate: source.crt key: source.key secretName: my-user-source bootstrapServers: my-cluster-kafka-bootstrap:9092 (5) tls: (6) trustedCertificates: - secretName: my-cluster-cluster-cert certificate: ca.crt - secretName: my-cluster-cluster-cert certificate: ca2.crt config: (7) group.id: my-connect-cluster offset.storage.topic: my-connect-cluster-offsets config.storage.topic: my-connect-cluster-configs status.storage.topic: my-connect-cluster-status key.converter: org.apache.kafka.connect.json.JsonConverter value.converter: org.apache.kafka.connect.json.JsonConverter key.converter.schemas.enable: true value.converter.schemas.enable: true config.storage.replication.factor: 3 offset.storage.replication.factor: 3 status.storage.replication.factor: 3 externalConfiguration: (8) env: - name: AWS_ACCESS_KEY_ID valueFrom: secretKeyRef: name: aws-creds key: awsAccessKey - name: AWS_SECRET_ACCESS_KEY valueFrom: secretKeyRef: name: aws-creds key: awsSecretAccessKey resources: (9) requests: cpu: "1" memory: 2Gi limits: cpu: "2" memory: 2Gi logging: (10) type: inline loggers: log4j.rootLogger: "INFO" readinessProbe: (11) initialDelaySeconds: 15 timeoutSeconds: 5 livenessProbe: initialDelaySeconds: 15 timeoutSeconds: 5 metrics: (12) lowercaseOutputName: true lowercaseOutputLabelNames: true rules: - pattern: kafka.connect<type=connect-worker-metrics><>([a-z-]+) name: kafka_connect_worker_$1 help: "Kafka Connect JMX metric worker" type: GAUGE - pattern: kafka.connect<type=connect-worker-rebalance-metrics><>([a-z-]+) name: kafka_connect_worker_rebalance_$1 help: "Kafka Connect JMX metric rebalance information" type: GAUGE jvmOptions: (13) "-Xmx": "1g" "-Xms": "1g" image: my-org/my-image:latest (14) template: (15) pod: affinity: podAntiAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: application operator: In values: - postgresql - mongodb topologyKey: "kubernetes.io/hostname" connectContainer: (16) env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831"-
Use
KafkaConnectorKafkaConnectS2I, as required. -
Enables
KafkaConnectorsfor the Kafka Connect cluster. -
Authentication for the Kafka Connect cluster, using the TLS mechanism, as shown here, using OAuth bearer tokens, or a SASL-based SCRAM-SHA-512 or PLAIN mechanism. By default, Kafka Connect connects to Kafka brokers using a plain text connection.
-
Bootstrap server for connection to the Kafka Connect cluster.
-
TLS encryption with key names under which TLS certificates are stored in X.509 format for the cluster. If certificates are stored in the same secret, it can be listed multiple times.
-
Kafka Connect configuration of workers (not connectors). Standard Apache Kafka configuration may be provided, restricted to those properties not managed directly by Strimzi.
-
External configuration for Kafka connectors using environment variables, as shown here, or volumes.
-
Requests for reservation of supported resources, currently
cpuandmemory, and limits to specify the maximum resources that can be consumed. -
Specified Kafka Connect loggers and log levels added directly (
inline) or indirectly (external) through a ConfigMap. A custom ConfigMap must be placed under thelog4j.propertiesorlog4j2.propertieskey. For the Kafka Connectlog4j.rootLoggerlogger, you can set the log level to INFO, ERROR, WARN, TRACE, DEBUG, FATAL or OFF. -
Healthchecks to know when to restart a container (liveness) and when a container can accept traffic (readiness).
-
Prometheus metrics, which are enabled with configuration for the Prometheus JMX exporter in this example. You can enable metrics without further configuration using
metrics: {}. -
JVM configuration options to optimize performance for the Virtual Machine (VM) running Kafka Connect.
-
ADVANCED OPTION: Container image configuration, which is recommended only in special situations.
-
Template customization. Here a pod is scheduled with anti-affinity, so the pod is not scheduled on nodes with the same hostname.
-
Environment variables are also set for distributed tracing using Jaeger.
-
-
Create or update the resource:
kubectl apply -f KAFKA-CONNECT-CONFIG-FILE -
If authorization is enabled for Kafka Connect, configure Kafka Connect users to enable access to the Kafka Connect consumer group and topics.
2.2.2. Kafka Connect configuration for multiple instances
If you are running multiple instances of Kafka Connect, you have to change the default configuration of the following config properties:
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
metadata:
name: my-connect
spec:
# ...
config:
group.id: connect-cluster (1)
offset.storage.topic: connect-cluster-offsets (2)
config.storage.topic: connect-cluster-configs (3)
status.storage.topic: connect-cluster-status (4)
# ...
# ...-
Kafka Connect cluster group that the instance belongs to.
-
Kafka topic that stores connector offsets.
-
Kafka topic that stores connector and task status configurations.
-
Kafka topic that stores connector and task status updates.
|
Note
|
Values for the three topics must be the same for all Kafka Connect instances with the same group.id.
|
Unless you change the default settings, each Kafka Connect instance connecting to the same Kafka cluster is deployed with the same values. What happens, in effect, is all instances are coupled to run in a cluster and use the same topics.
If multiple Kafka Connect clusters try to use the same topics, Kafka Connect will not work as expected and generate errors.
If you wish to run multiple Kafka Connect instances, change the values of these properties for each instance.
2.2.3. Configuring Kafka Connect user authorization
This procedure describes how to authorize user access to Kafka Connect.
When any type of authorization is being used in Kafka, a Kafka Connect user requires read/write access rights to the consumer group and the internal topics of Kafka Connect.
The properties for the consumer group and internal topics are automatically configured by Strimzi,
or they can be specified explicitly in the spec of the KafkaConnect or KafkaConnectS2I resource.
Example configuration properties in the
KafkaConnect resourceapiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
metadata:
name: my-connect
spec:
# ...
config:
group.id: my-connect-cluster (1)
offset.storage.topic: my-connect-cluster-offsets (2)
config.storage.topic: my-connect-cluster-configs (3)
status.storage.topic: my-connect-cluster-status (4)
# ...
# ...-
Kafka Connect cluster group that the instance belongs to.
-
Kafka topic that stores connector offsets.
-
Kafka topic that stores connector and task status configurations.
-
Kafka topic that stores connector and task status updates.
This procedure shows how access is provided when simple authorization is being used.
Simple authorization uses ACL rules, handled by the Kafka AclAuthorizer plugin, to provide the right level of access.
For more information on configuring a KafkaUser resource to use simple authorization, see the AclRule schema reference.
|
Note
|
The default values for the consumer group and topics will differ when running multiple instances. |
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
authorizationproperty in theKafkaUserresource to provide access rights to the user.In the following example, access rights are configured for the Kafka Connect topics and consumer group using
literalname values:Property Name offset.storage.topicconnect-cluster-offsetsstatus.storage.topicconnect-cluster-statusconfig.storage.topicconnect-cluster-configsgroupconnect-clusterapiVersion: kafka.strimzi.io/v1beta1 kind: KafkaUser metadata: name: my-user labels: strimzi.io/cluster: my-cluster spec: # ... authorization: type: simple acls: # access to offset.storage.topic - resource: type: topic name: connect-cluster-offsets patternType: literal operation: Write host: "*" - resource: type: topic name: connect-cluster-offsets patternType: literal operation: Create host: "*" - resource: type: topic name: connect-cluster-offsets patternType: literal operation: Describe host: "*" - resource: type: topic name: connect-cluster-offsets patternType: literal operation: Read host: "*" # access to status.storage.topic - resource: type: topic name: connect-cluster-status patternType: literal operation: Write host: "*" - resource: type: topic name: connect-cluster-status patternType: literal operation: Create host: "*" - resource: type: topic name: connect-cluster-status patternType: literal operation: Describe host: "*" - resource: type: topic name: connect-cluster-status patternType: literal operation: Read host: "*" # access to config.storage.topic - resource: type: topic name: connect-cluster-configs patternType: literal operation: Write host: "*" - resource: type: topic name: connect-cluster-configs patternType: literal operation: Create host: "*" - resource: type: topic name: connect-cluster-configs patternType: literal operation: Describe host: "*" - resource: type: topic name: connect-cluster-configs patternType: literal operation: Read host: "*" # consumer group - resource: type: group name: connect-cluster patternType: literal operation: Read host: "*" -
Create or update the resource.
kubectl apply -f KAFKA-USER-CONFIG-FILE
2.2.4. List of Kafka Connect cluster resources
The following resources are created by the Cluster Operator in the Kubernetes cluster:
- connect-cluster-name-connect
-
Deployment which is in charge to create the Kafka Connect worker node pods.
- connect-cluster-name-connect-api
-
Service which exposes the REST interface for managing the Kafka Connect cluster.
- connect-cluster-name-config
-
ConfigMap which contains the Kafka Connect ancillary configuration and is mounted as a volume by the Kafka broker pods.
- connect-cluster-name-connect
-
Pod Disruption Budget configured for the Kafka Connect worker nodes.
2.2.5. List of Kafka Connect (S2I) cluster resources
The following resources are created by the Cluster Operator in the Kubernetes cluster:
- connect-cluster-name-connect-source
-
ImageStream which is used as the base image for the newly-built Docker images.
- connect-cluster-name-connect
-
BuildConfig which is responsible for building the new Kafka Connect Docker images.
- connect-cluster-name-connect
-
ImageStream where the newly built Docker images will be pushed.
- connect-cluster-name-connect
-
DeploymentConfig which is in charge of creating the Kafka Connect worker node pods.
- connect-cluster-name-connect-api
-
Service which exposes the REST interface for managing the Kafka Connect cluster.
- connect-cluster-name-config
-
ConfigMap which contains the Kafka Connect ancillary configuration and is mounted as a volume by the Kafka broker pods.
- connect-cluster-name-connect
-
Pod Disruption Budget configured for the Kafka Connect worker nodes.
2.3. Kafka MirrorMaker cluster configuration
This chapter describes how to configure a Kafka MirrorMaker deployment in your Strimzi cluster to replicate data between Kafka clusters.
You can use Strimzi with MirrorMaker or MirrorMaker 2.0. MirrorMaker 2.0 is the latest version, and offers a more efficient way to mirror data between Kafka clusters.
If you are using MirrorMaker, you configure the KafkaMirrorMaker resource.
The following procedure shows how the resource is configured:
The full schema of the KafkaMirrorMaker resource is described in the KafkaMirrorMaker schema reference.
2.3.1. Configuring Kafka MirrorMaker
Use the properties of the KafkaMirrorMaker resource to configure your Kafka MirrorMaker deployment.
You can configure access control for producers and consumers using TLS or SASL authentication. This procedure shows a configuration that uses TLS encryption and authentication on the consumer and producer side.
Prerequisites
-
See the Deploying Strimzi guide for instructions on running a:
-
Source and target Kafka clusters must be available
Procedure
-
Edit the
specproperties for theKafkaMirrorMakerresource.The properties you can configure are shown in this example configuration:
apiVersion: kafka.strimzi.io/v1beta1 kind: KafkaMirrorMaker metadata: name: my-mirror-maker spec: replicas: 3 (1) consumer: bootstrapServers: my-source-cluster-kafka-bootstrap:9092 (2) groupId: "my-group" (3) numStreams: 2 (4) offsetCommitInterval: 120000 (5) tls: (6) trustedCertificates: - secretName: my-source-cluster-ca-cert certificate: ca.crt authentication: (7) type: tls certificateAndKey: secretName: my-source-secret certificate: public.crt key: private.key config: (8) max.poll.records: 100 receive.buffer.bytes: 32768 ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384" (9) ssl.enabled.protocols: "TLSv1.2" ssl.protocol: "TLSv1.2" ssl.endpoint.identification.algorithm: HTTPS (10) producer: bootstrapServers: my-target-cluster-kafka-bootstrap:9092 abortOnSendFailure: false (11) tls: trustedCertificates: - secretName: my-target-cluster-ca-cert certificate: ca.crt authentication: type: tls certificateAndKey: secretName: my-target-secret certificate: public.crt key: private.key config: compression.type: gzip batch.size: 8192 ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384" (12) ssl.enabled.protocols: "TLSv1.2" ssl.protocol: "TLSv1.2" ssl.endpoint.identification.algorithm: HTTPS (13) whitelist: "my-topic|other-topic" (14) resources: (15) requests: cpu: "1" memory: 2Gi limits: cpu: "2" memory: 2Gi logging: (16) type: inline loggers: mirrormaker.root.logger: "INFO" readinessProbe: (17) initialDelaySeconds: 15 timeoutSeconds: 5 livenessProbe: initialDelaySeconds: 15 timeoutSeconds: 5 metrics: (18) lowercaseOutputName: true rules: - pattern: "kafka.server<type=(.+), name=(.+)PerSec\\w*><>Count" name: "kafka_server_$1_$2_total" - pattern: "kafka.server<type=(.+), name=(.+)PerSec\\w*, topic=(.+)><>Count" name: "kafka_server_$1_$2_total" labels: topic: "$3" jvmOptions: (19) "-Xmx": "1g" "-Xms": "1g" image: my-org/my-image:latest (20) template: (21) pod: affinity: podAntiAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: application operator: In values: - postgresql - mongodb topologyKey: "kubernetes.io/hostname" connectContainer: (22) env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831" tracing: (23) type: jaeger-
Bootstrap servers for consumer and producer.
-
TLS encryption with key names under which TLS certificates are stored in X.509 format for consumer or producer. If certificates are stored in the same secret, it can be listed multiple times.
-
Authentication for consumer or producer, using the TLS mechanism, as shown here, using OAuth bearer tokens, or a SASL-based SCRAM-SHA-512 or PLAIN mechanism.
-
SSL properties for external listeners to run with a specific cipher suite for a TLS version.
-
Hostname verification is enabled by setting to
HTTPS. An empty string disables the verification. -
If the
abortOnSendFailureproperty is set totrue, Kafka MirrorMaker will exit and the container will restart following a send failure for a message. -
SSL properties for external listeners to run with a specific cipher suite for a TLS version.
-
Hostname verification is enabled by setting to
HTTPS. An empty string disables the verification. -
A whitelist of topics mirrored from source to target Kafka cluster.
-
Requests for reservation of supported resources, currently
cpuandmemory, and limits to specify the maximum resources that can be consumed. -
Specified loggers and log levels added directly (
inline) or indirectly (external) through a ConfigMap. A custom ConfigMap must be placed under thelog4j.propertiesorlog4j2.propertieskey. MirrorMaker has a single logger calledmirrormaker.root.logger. You can set the log level to INFO, ERROR, WARN, TRACE, DEBUG, FATAL or OFF. -
Healthchecks to know when to restart a container (liveness) and when a container can accept traffic (readiness).
-
Prometheus metrics, which are enabled with configuration for the Prometheus JMX exporter in this example. You can enable metrics without further configuration using
metrics: {}. -
JVM configuration options to optimize performance for the Virtual Machine (VM) running Kafka MirrorMaker.
-
ADVANCED OPTION: Container image configuration, which is recommended only in special situations.
-
Template customization. Here a pod is scheduled with anti-affinity, so the pod is not scheduled on nodes with the same hostname.
-
Environment variables are also set for distributed tracing using Jaeger.
WarningWith the abortOnSendFailureproperty set tofalse, the producer attempts to send the next message in a topic. The original message might be lost, as there is no attempt to resend a failed message. -
Create or update the resource:
kubectl apply -f <your-file>
2.3.2. List of Kafka MirrorMaker cluster resources
The following resources are created by the Cluster Operator in the Kubernetes cluster:
- <mirror-maker-name>-mirror-maker
-
Deployment which is responsible for creating the Kafka MirrorMaker pods.
- <mirror-maker-name>-config
-
ConfigMap which contains ancillary configuration for the Kafka MirrorMaker, and is mounted as a volume by the Kafka broker pods.
- <mirror-maker-name>-mirror-maker
-
Pod Disruption Budget configured for the Kafka MirrorMaker worker nodes.
2.4. Kafka MirrorMaker 2.0 cluster configuration
This section describes how to configure a Kafka MirrorMaker 2.0 deployment in your Strimzi cluster.
MirrorMaker 2.0 is used to replicate data between two or more active Kafka clusters, within or across data centers.
Data replication across clusters supports scenarios that require:
-
Recovery of data in the event of a system failure
-
Aggregation of data for analysis
-
Restriction of data access to a specific cluster
-
Provision of data at a specific location to improve latency
If you are using MirrorMaker 2.0, you configure the KafkaMirrorMaker2 resource.
MirrorMaker 2.0 introduces an entirely new way of replicating data between clusters.
As a result, the resource configuration differs from the previous version of MirrorMaker. If you choose to use MirrorMaker 2.0, there is currently no legacy support, so any resources must be manually converted into the new format.
How MirrorMaker 2.0 replicates data is described here:
The following procedure shows how the resource is configured for MirrorMaker 2.0:
The full schema of the KafkaMirrorMaker2 resource is described in the KafkaMirrorMaker2 schema reference.
2.4.1. MirrorMaker 2.0 data replication
MirrorMaker 2.0 consumes messages from a source Kafka cluster and writes them to a target Kafka cluster.
MirrorMaker 2.0 uses:
-
Source cluster configuration to consume data from the source cluster
-
Target cluster configuration to output data to the target cluster
MirrorMaker 2.0 is based on the Kafka Connect framework, connectors managing the transfer of data between clusters.
A MirrorMaker 2.0 MirrorSourceConnector replicates topics from a source cluster to a target cluster.
The process of mirroring data from one cluster to another cluster is asynchronous. The recommended pattern is for messages to be produced locally alongside the source Kafka cluster, then consumed remotely close to the target Kafka cluster.
MirrorMaker 2.0 can be used with more than one source cluster.
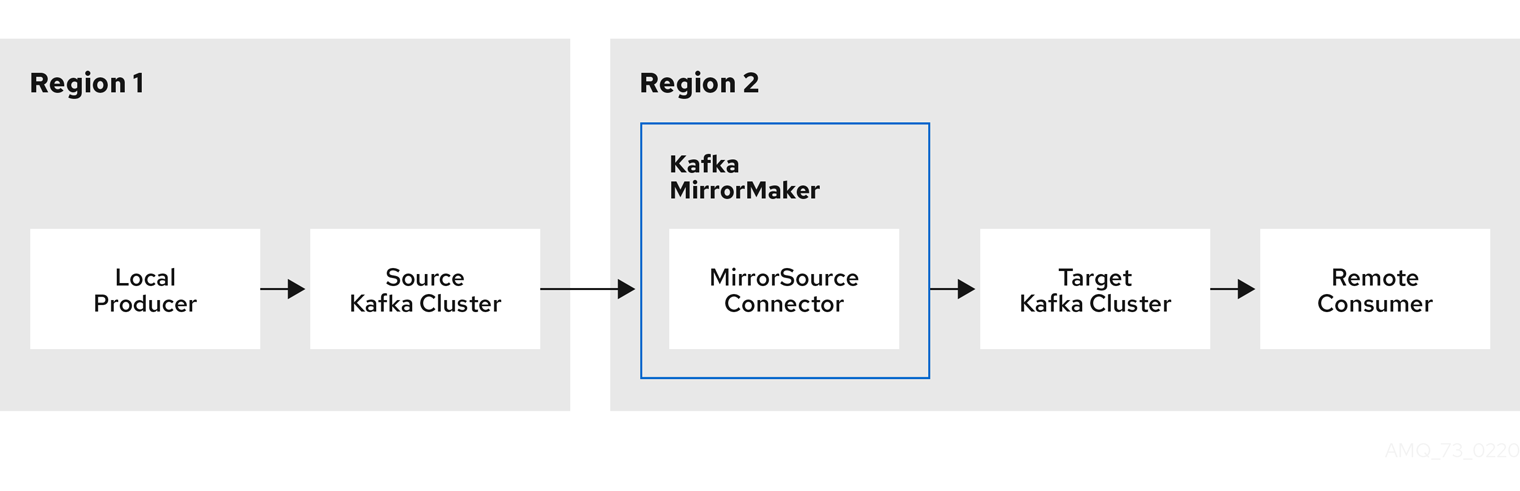
Figure 1. Replication across two clusters
2.4.2. Cluster configuration
You can use MirrorMaker 2.0 in active/passive or active/active cluster configurations.
-
In an active/active configuration, both clusters are active and provide the same data simultaneously, which is useful if you want to make the same data available locally in different geographical locations.
-
In an active/passive configuration, the data from an active cluster is replicated in a passive cluster, which remains on standby, for example, for data recovery in the event of system failure.
The expectation is that producers and consumers connect to active clusters only.
A MirrorMaker 2.0 cluster is required at each target destination.
Bidirectional replication (active/active)
The MirrorMaker 2.0 architecture supports bidirectional replication in an active/active cluster configuration.
Each cluster replicates the data of the other cluster using the concept of source and remote topics. As the same topics are stored in each cluster, remote topics are automatically renamed by MirrorMaker 2.0 to represent the source cluster. The name of the originating cluster is prepended to the name of the topic.
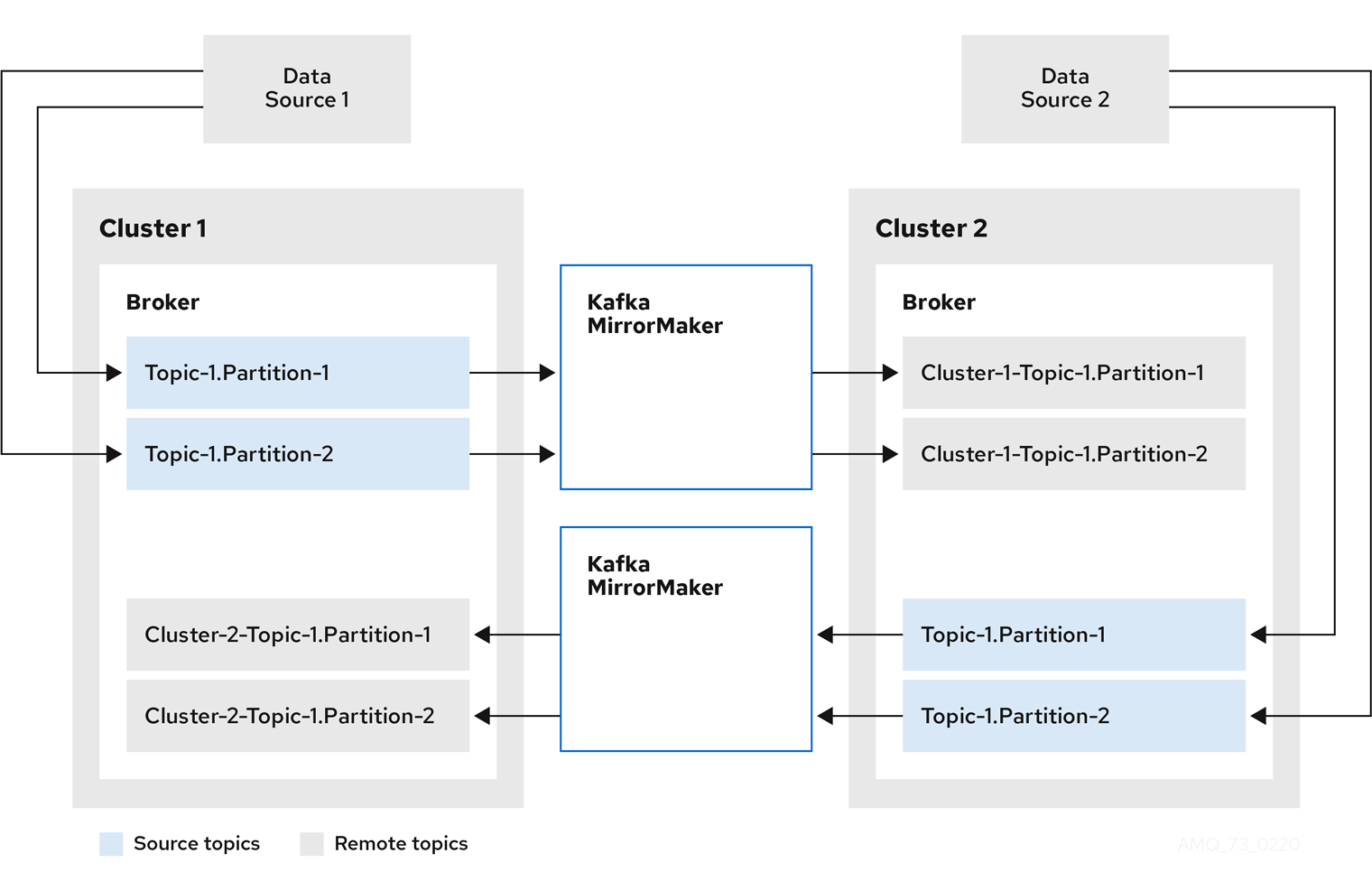
Figure 2. Topic renaming
By flagging the originating cluster, topics are not replicated back to that cluster.
The concept of replication through remote topics is useful when configuring an architecture that requires data aggregation. Consumers can subscribe to source and remote topics within the same cluster, without the need for a separate aggregation cluster.
Unidirectional replication (active/passive)
The MirrorMaker 2.0 architecture supports unidirectional replication in an active/passive cluster configuration.
You can use an active/passive cluster configuration to make backups or migrate data to another cluster. In this situation, you might not want automatic renaming of remote topics.
You can override automatic renaming by adding IdentityReplicationPolicy to the source connector configuration of the KafkaMirrorMaker2 resource.
With this configuration applied, topics retain their original names.
Topic configuration synchronization
Topic configuration is automatically synchronized between source and target clusters. By synchronizing configuration properties, the need for rebalancing is reduced.
Data integrity
MirrorMaker 2.0 monitors source topics and propagates any configuration changes to remote topics, checking for and creating missing partitions. Only MirrorMaker 2.0 can write to remote topics.
Offset tracking
MirrorMaker 2.0 tracks offsets for consumer groups using internal topics.
-
The offset sync topic maps the source and target offsets for replicated topic partitions from record metadata
-
The checkpoint topic maps the last committed offset in the source and target cluster for replicated topic partitions in each consumer group
Offsets for the checkpoint topic are tracked at predetermined intervals through configuration. Both topics enable replication to be fully restored from the correct offset position on failover.
MirrorMaker 2.0 uses its MirrorCheckpointConnector to emit checkpoints for offset tracking.
Connectivity checks
A heartbeat internal topic checks connectivity between clusters.
The heartbeat topic is replicated from the source cluster.
Target clusters use the topic to check:
-
The connector managing connectivity between clusters is running
-
The source cluster is available
MirrorMaker 2.0 uses its MirrorHeartbeatConnector to emit heartbeats that perform these checks.
2.4.3. ACL rules synchronization
ACL access to remote topics is possible if you are not using the User Operator.
If AclAuthorizer is being used, without the User Operator, ACL rules that manage access to brokers also apply to remote topics.
Users that can read a source topic can read its remote equivalent.
|
Note
|
OAuth 2.0 authorization does not support access to remote topics in this way. |
2.4.4. Synchronizing data between Kafka clusters using MirrorMaker 2.0
Use MirrorMaker 2.0 to synchronize data between Kafka clusters through configuration.
The configuration must specify:
-
Each Kafka cluster
-
Connection information for each cluster, including TLS authentication
-
The replication flow and direction
-
Cluster to cluster
-
Topic to topic
-
Use the properties of the KafkaMirrorMaker2 resource to configure your Kafka MirrorMaker 2.0 deployment.
|
Note
|
The previous version of MirrorMaker continues to be supported. If you wish to use the resources configured for the previous version, they must be updated to the format supported by MirrorMaker 2.0. |
MirrorMaker 2.0 provides default configuration values for properties such as replication factors. A minimal configuration, with defaults left unchanged, would be something like this example:
apiVersion: kafka.strimzi.io/v1alpha1
kind: KafkaMirrorMaker2
metadata:
name: my-mirror-maker2
spec:
version: 2.6.0
connectCluster: "my-cluster-target"
clusters:
- alias: "my-cluster-source"
bootstrapServers: my-cluster-source-kafka-bootstrap:9092
- alias: "my-cluster-target"
bootstrapServers: my-cluster-target-kafka-bootstrap:9092
mirrors:
- sourceCluster: "my-cluster-source"
targetCluster: "my-cluster-target"
sourceConnector: {}You can configure access control for source and target clusters using TLS or SASL authentication. This procedure shows a configuration that uses TLS encryption and authentication for the source and target cluster.
Prerequisites
-
See the Deploying Strimzi guide for instructions on running a:
-
Source and target Kafka clusters must be available
Procedure
-
Edit the
specproperties for theKafkaMirrorMaker2resource.The properties you can configure are shown in this example configuration:
apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaMirrorMaker2 metadata: name: my-mirror-maker2 spec: version: 2.6.0 (1) replicas: 3 (2) connectCluster: "my-cluster-target" (3) clusters: (4) - alias: "my-cluster-source" (5) authentication: (6) certificateAndKey: certificate: source.crt key: source.key secretName: my-user-source type: tls bootstrapServers: my-cluster-source-kafka-bootstrap:9092 (7) tls: (8) trustedCertificates: - certificate: ca.crt secretName: my-cluster-source-cluster-ca-cert - alias: "my-cluster-target" (9) authentication: (10) certificateAndKey: certificate: target.crt key: target.key secretName: my-user-target type: tls bootstrapServers: my-cluster-target-kafka-bootstrap:9092 (11) config: (12) config.storage.replication.factor: 1 offset.storage.replication.factor: 1 status.storage.replication.factor: 1 ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384" (13) ssl.enabled.protocols: "TLSv1.2" ssl.protocol: "TLSv1.2" ssl.endpoint.identification.algorithm: HTTPS (14) tls: (15) trustedCertificates: - certificate: ca.crt secretName: my-cluster-target-cluster-ca-cert mirrors: (16) - sourceCluster: "my-cluster-source" (17) targetCluster: "my-cluster-target" (18) sourceConnector: (19) config: replication.factor: 1 (20) offset-syncs.topic.replication.factor: 1 (21) sync.topic.acls.enabled: "false" (22) replication.policy.separator: "" (23) replication.policy.class: "io.strimzi.kafka.connect.mirror.IdentityReplicationPolicy" (24) heartbeatConnector: (25) config: heartbeats.topic.replication.factor: 1 (26) checkpointConnector: (27) config: checkpoints.topic.replication.factor: 1 (28) topicsPattern: ".*" (29) groupsPattern: "group1|group2|group3" (30) resources: (31) requests: cpu: "1" memory: 2Gi limits: cpu: "2" memory: 2Gi logging: (32) type: inline loggers: connect.root.logger.level: "INFO" readinessProbe: (33) initialDelaySeconds: 15 timeoutSeconds: 5 livenessProbe: initialDelaySeconds: 15 timeoutSeconds: 5 jvmOptions: (34) "-Xmx": "1g" "-Xms": "1g" image: my-org/my-image:latest (35) template: (36) pod: affinity: podAntiAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: application operator: In values: - postgresql - mongodb topologyKey: "kubernetes.io/hostname" connectContainer: (37) env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831" tracing: type: jaeger (38) externalConfiguration: (39) env: - name: AWS_ACCESS_KEY_ID valueFrom: secretKeyRef: name: aws-creds key: awsAccessKey - name: AWS_SECRET_ACCESS_KEY valueFrom: secretKeyRef: name: aws-creds key: awsSecretAccessKey-
The Kafka Connect version.
-
Cluster alias for Kafka Connect.
-
Specification for the Kafka clusters being synchronized.
-
Cluster alias for the source Kafka cluster.
-
Authentication for the source cluster, using the TLS mechanism, as shown here, using OAuth bearer tokens, or a SASL-based SCRAM-SHA-512 or PLAIN mechanism.
-
Bootstrap server for connection to the source Kafka cluster.
-
TLS encryption with key names under which TLS certificates are stored in X.509 format for the source Kafka cluster. If certificates are stored in the same secret, it can be listed multiple times.
-
Cluster alias for the target Kafka cluster.
-
Authentication for the target Kafka cluster is configured in the same way as for the source Kafka cluster.
-
Bootstrap server for connection to the target Kafka cluster.
-
Kafka Connect configuration. Standard Apache Kafka configuration may be provided, restricted to those properties not managed directly by Strimzi.
-
SSL properties for external listeners to run with a specific cipher suite for a TLS version.
-
Hostname verification is enabled by setting to
HTTPS. An empty string disables the verification. -
TLS encryption for the target Kafka cluster is configured in the same way as for the source Kafka cluster.
-
Cluster alias for the source cluster used by the MirrorMaker 2.0 connectors.
-
Cluster alias for the target cluster used by the MirrorMaker 2.0 connectors.
-
Configuration for the
MirrorSourceConnectorthat creates remote topics. Theconfigoverrides the default configuration options. -
Replication factor for mirrored topics created at the target cluster.
-
Replication factor for the
MirrorSourceConnectoroffset-syncsinternal topic that maps the offsets of the source and target clusters. -
When ACL rules synchronization is enabled, ACLs are applied to synchronized topics. The default is
true. -
Defines the separator used for the renaming of remote topics.
-
Adds a policy that overrides the automatic renaming of remote topics. Instead of prepending the name with the name of the source cluster, the topic retains its original name. This optional setting is useful for active/passive backups and data migration.
-
Configuration for the
MirrorHeartbeatConnectorthat performs connectivity checks. Theconfigoverrides the default configuration options. -
Replication factor for the heartbeat topic created at the target cluster.
-
Configuration for the
MirrorCheckpointConnectorthat tracks offsets. Theconfigoverrides the default configuration options. -
Replication factor for the checkpoints topic created at the target cluster.
-
Topic replication from the source cluster defined as regular expression patterns. Here we request all topics.
-
Consumer group replication from the source cluster defined as regular expression patterns. Here we request three consumer groups by name. You can use comma-separated lists.
-
Requests for reservation of supported resources, currently
cpuandmemory, and limits to specify the maximum resources that can be consumed. -
Specified Kafka Connect loggers and log levels added directly (
inline) or indirectly (external) through a ConfigMap. A custom ConfigMap must be placed under thelog4j.propertiesorlog4j2.propertieskey. For the Kafka Connectlog4j.rootLoggerlogger, you can set the log level to INFO, ERROR, WARN, TRACE, DEBUG, FATAL or OFF. -
Healthchecks to know when to restart a container (liveness) and when a container can accept traffic (readiness).
-
JVM configuration options to optimize performance for the Virtual Machine (VM) running Kafka MirrorMaker.
-
ADVANCED OPTION: Container image configuration, which is recommended only in special situations.
-
Template customization. Here a pod is scheduled with anti-affinity, so the pod is not scheduled on nodes with the same hostname.
-
Environment variables are also set for distributed tracing using Jaeger.
-
External configuration for a Kubernetes Secret mounted to Kafka MirrorMaker as an environment variable.
-
-
Create or update the resource:
kubectl apply -f <your-file>
2.5. Kafka Bridge cluster configuration
This section describes how to configure a Kafka Bridge deployment in your Strimzi cluster.
Kafka Bridge provides an API for integrating HTTP-based clients with a Kafka cluster.
If you are using the Kafka Bridge, you configure the KafkaBridge resource.
The full schema of the KafkaBridge resource is described in KafkaBridge schema reference.
2.5.1. Configuring the Kafka Bridge
Use the Kafka Bridge to make HTTP-based requests to the Kafka cluster.
Use the properties of the KafkaBridge resource to configure your Kafka Bridge deployment.
In order to prevent issues arising when client consumer requests are processed by different Kafka Bridge instances, address-based routing must be employed to ensure that requests are routed to the right Kafka Bridge instance. Additionally, each independent Kafka Bridge instance must have a replica. A Kafka Bridge instance has its own state which is not shared with another instances.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
See the Deploying Strimzi guide for instructions on running a:
Procedure
-
Edit the
specproperties for theKafkaBridgeresource.The properties you can configure are shown in this example configuration:
apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaBridge metadata: name: my-bridge spec: replicas: 3 (1) bootstrapServers: my-cluster-kafka-bootstrap:9092 (2) tls: (3) trustedCertificates: - secretName: my-cluster-cluster-cert certificate: ca.crt - secretName: my-cluster-cluster-cert certificate: ca2.crt authentication: (4) type: tls certificateAndKey: secretName: my-secret certificate: public.crt key: private.key http: (5) port: 8080 cors: (6) allowedOrigins: "https://strimzi.io" allowedMethods: "GET,POST,PUT,DELETE,OPTIONS,PATCH" consumer: (7) config: auto.offset.reset: earliest producer: (8) config: delivery.timeout.ms: 300000 resources: (9) requests: cpu: "1" memory: 2Gi limits: cpu: "2" memory: 2Gi logging: (10) type: inline loggers: logger.bridge.level: "INFO" # enabling DEBUG just for send operation logger.send.name: "http.openapi.operation.send" logger.send.level: "DEBUG" jvmOptions: (11) "-Xmx": "1g" "-Xms": "1g" readinessProbe: (12) initialDelaySeconds: 15 timeoutSeconds: 5 livenessProbe: initialDelaySeconds: 15 timeoutSeconds: 5 image: my-org/my-image:latest (13) template: (14) pod: affinity: podAntiAffinity: requiredDuringSchedulingIgnoredDuringExecution: - labelSelector: matchExpressions: - key: application operator: In values: - postgresql - mongodb topologyKey: "kubernetes.io/hostname" bridgeContainer: (15) env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831"-
Bootstrap server for connection to the target Kafka cluster.
-
TLS encryption with key names under which TLS certificates are stored in X.509 format for the source Kafka cluster. If certificates are stored in the same secret, it can be listed multiple times.
-
Authentication for the Kafka Bridge cluster, using the TLS mechanism, as shown here, using OAuth bearer tokens, or a SASL-based SCRAM-SHA-512 or PLAIN mechanism. By default, the Kafka Bridge connects to Kafka brokers without authentication.
-
HTTP access to Kafka brokers.
-
CORS access specifying selected resources and access methods. Additional HTTP headers in requests describe the origins that are permitted access to the Kafka cluster.
-
Consumer configuration options.
-
Producer configuration options.
-
Requests for reservation of supported resources, currently
cpuandmemory, and limits to specify the maximum resources that can be consumed. -
Specified Kafka Bridge loggers and log levels added directly (
inline) or indirectly (external) through a ConfigMap. A custom ConfigMap must be placed under thelog4j.propertiesorlog4j2.propertieskey. For the Kafka Bridge loggers, you can set the log level to INFO, ERROR, WARN, TRACE, DEBUG, FATAL or OFF. -
JVM configuration options to optimize performance for the Virtual Machine (VM) running the Kafka Bridge.
-
Healthchecks to know when to restart a container (liveness) and when a container can accept traffic (readiness).
-
ADVANCED OPTION: Container image configuration, which is recommended only in special situations.
-
Template customization. Here a pod is scheduled with anti-affinity, so the pod is not scheduled on nodes with the same hostname.
-
Environment variables are also set for distributed tracing using Jaeger.
-
Create or update the resource:
kubectl apply -f KAFKA-BRIDGE-CONFIG-FILE
2.5.2. List of Kafka Bridge cluster resources
The following resources are created by the Cluster Operator in the Kubernetes cluster:
- bridge-cluster-name-bridge
-
Deployment which is in charge to create the Kafka Bridge worker node pods.
- bridge-cluster-name-bridge-service
-
Service which exposes the REST interface of the Kafka Bridge cluster.
- bridge-cluster-name-bridge-config
-
ConfigMap which contains the Kafka Bridge ancillary configuration and is mounted as a volume by the Kafka broker pods.
- bridge-cluster-name-bridge
-
Pod Disruption Budget configured for the Kafka Bridge worker nodes.
2.6. Customizing Kubernetes resources
Strimzi creates several Kubernetes resources, such as Deployments, StatefulSets, Pods, and Services, which are managed by Strimzi operators.
Only the operator that is responsible for managing a particular Kubernetes resource can change that resource.
If you try to manually change an operator-managed Kubernetes resource, the operator will revert your changes back.
However, changing an operator-managed Kubernetes resource can be useful if you want to perform certain tasks, such as:
-
Adding custom labels or annotations that control how
Podsare treated by Istio or other services -
Managing how
Loadbalancer-type Services are created by the cluster
You can make such changes using the template property in the Strimzi custom resources.
The template property is supported in the following resources.
The API reference provides more details about the customizable fields.
Kafka.spec.kafkaKafka.spec.zookeeperKafka.spec.entityOperatorKafka.spec.kafkaExporterKafka.spec.cruiseControlKafka.spec.jmxTransKafkaConnect.specKafkaConnectS2I.specKafkaMirrorMaker.specKafkaMirrorMaker2.specKafkaBridge.specKafkaUser.spec
In the following example, the template property is used to modify the labels in a Kafka broker’s StatefulSet:
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
labels:
app: my-cluster
spec:
kafka:
# ...
template:
statefulset:
metadata:
labels:
mylabel: myvalue
# ...2.6.1. Customizing the image pull policy
Strimzi allows you to customize the image pull policy for containers in all pods deployed by the Cluster Operator.
The image pull policy is configured using the environment variable STRIMZI_IMAGE_PULL_POLICY in the Cluster Operator deployment.
The STRIMZI_IMAGE_PULL_POLICY environment variable can be set to three different values:
Always-
Container images are pulled from the registry every time the pod is started or restarted.
IfNotPresent-
Container images are pulled from the registry only when they were not pulled before.
Never-
Container images are never pulled from the registry.
The image pull policy can be currently customized only for all Kafka, Kafka Connect, and Kafka MirrorMaker clusters at once. Changing the policy will result in a rolling update of all your Kafka, Kafka Connect, and Kafka MirrorMaker clusters.
Additional resources
-
For more information about Cluster Operator configuration, see Using the Cluster Operator.
-
For more information about Image Pull Policies, see Disruptions.
2.7. External logging
When setting the logging levels for a resource, you can specify them inline directly in the spec.logging property of the resource YAML:
spec:
# ...
logging:
type: inline
loggers:
kafka.root.logger.level: "INFO"Or you can specify external logging:
spec:
# ...
logging:
type: external
name: customConfigMapWith external logging, logging properties are defined in a ConfigMap.
The name of the ConfigMap is referenced in the spec.logging.name property.
The advantages of using a ConfigMap are that the logging properties are maintained in one place and are accessible to more than one resource.
2.7.1. Creating a ConfigMap for logging
To use a ConfigMap to define logging properties, you create the ConfigMap and then reference it as part of the logging definition in the spec of a resource.
The ConfigMap must contain the appropriate logging configuration.
-
log4j.propertiesfor Kafka components, ZooKeeper, and the Kafka Bridge -
log4j2.propertiesfor the Topic Operator and User Operator
The configuration must be placed under these properties.
Here we demonstrate how a ConfigMap defines a root logger for a Kafka resource.
Procedure
-
Create the ConfigMap.
You can create the ConfigMap as a YAML file or from a properties file using
kubectlat the command line.ConfigMap example with a root logger definition for Kafka:
kind: ConfigMap apiVersion: kafka.strimzi.io/v1beta1 metadata: name: logging-configmap data: log4j.properties: kafka.root.logger.level="INFO"From the command line, using a properties file:
kubectl create configmap logging-configmap --from-file=log4j.propertiesThe properties file defines the logging configuration:
# Define the logger kafka.root.logger.level="INFO" # ... -
Define external logging in the
specof the resource, setting thelogging.nameto the name of the ConfigMap.spec: # ... logging: type: external name: logging-configmap -
Create or update the resource.
kubectl apply -f kafka.yaml
3. Configuring external listeners
Use an external listener to expose your Strimzi Kafka cluster to a client outside a Kubernetes environment.
Specify the connection type to expose Kafka in the external listener configuration.
-
nodeportusesNodePorttypeServices -
loadbalancerusesLoadbalancertypeServices -
ingressuses KubernetesIngressand the NGINX Ingress Controller for Kubernetes -
routeuses OpenShiftRoutesand the HAProxy router
For more information on listener configuration, see GenericKafkaListener schema reference.
|
Note
|
route is only supported on OpenShift
|
Additional resources
3.1. Accessing Kafka using node ports
This procedure describes how to access a Strimzi Kafka cluster from an external client using node ports.
To connect to a broker, you need a hostname and port number for the Kafka bootstrap address, as well as the certificate used for authentication.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Configure a
Kafkaresource with an external listener set to thenodeporttype.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... listeners: - name: external port: 9094 type: nodeport tls: true authentication: type: tls # ... # ... zookeeper: # ... -
Create or update the resource.
kubectl apply -f KAFKA-CONFIG-FILENodePorttype services are created for each Kafka broker, as well as an external bootstrap service. The bootstrap service routes external traffic to the Kafka brokers. Node addresses used for connection are propagated to thestatusof the Kafka custom resource.The cluster CA certificate to verify the identity of the kafka brokers is also created with the same name as the
Kafkaresource. -
Retrieve the bootstrap address you can use to access the Kafka cluster from the status of the
Kafkaresource.kubectl get kafka KAFKA-CLUSTER-NAME -o=jsonpath='{.status.listeners[?(@.type=="external")].bootstrapServers}{"\n"}' -
If TLS encryption is enabled, extract the public certificate of the broker certification authority.
kubectl get secret KAFKA-CLUSTER-NAME-cluster-ca-cert -o jsonpath='{.data.ca\.crt}' | base64 -d > ca.crtUse the extracted certificate in your Kafka client to configure TLS connection. If you enabled any authentication, you will also need to configure SASL or TLS authentication.
3.2. Accessing Kafka using loadbalancers
This procedure describes how to access a Strimzi Kafka cluster from an external client using loadbalancers.
To connect to a broker, you need the address of the bootstrap loadbalancer, as well as the certificate used for TLS encryption.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Configure a
Kafkaresource with an external listener set to theloadbalancertype.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... listeners: - name: external port: 9094 type: loadbalancer tls: true # ... # ... zookeeper: # ... -
Create or update the resource.
kubectl apply -f KAFKA-CONFIG-FILEloadbalancertype services and loadbalancers are created for each Kafka broker, as well as an external bootstrap service. The bootstrap service routes external traffic to all Kafka brokers. DNS names and IP addresses used for connection are propagated to thestatusof each service.The cluster CA certificate to verify the identity of the kafka brokers is also created with the same name as the
Kafkaresource. -
Retrieve the address of the bootstrap service you can use to access the Kafka cluster from the status of the
Kafkaresource.kubectl get kafka KAFKA-CLUSTER-NAME -o=jsonpath='{.status.listeners[?(@.type=="external")].bootstrapServers}{"\n"}' -
If TLS encryption is enabled, extract the public certificate of the broker certification authority.
kubectl get secret KAFKA-CLUSTER-NAME-cluster-ca-cert -o jsonpath='{.data.ca\.crt}' | base64 -d > ca.crtUse the extracted certificate in your Kafka client to configure TLS connection. If you enabled any authentication, you will also need to configure SASL or TLS authentication.
3.3. Accessing Kafka using ingress
This procedure shows how to access a Strimzi Kafka cluster from an external client outside of Kubernetes using Nginx Ingress.
To connect to a broker, you need a hostname (advertised address) for the Ingress bootstrap address, as well as the certificate used for authentication.
For access using Ingress, the port is always 443.
TLS passthrough
Kafka uses a binary protocol over TCP, but the NGINX Ingress Controller for Kubernetes is designed to work with the HTTP protocol. To be able to pass the Kafka connections through the Ingress, Strimzi uses the TLS passthrough feature of the NGINX Ingress Controller for Kubernetes. Ensure TLS passthrough is enabled in your NGINX Ingress Controller for Kubernetes deployment.
Because it is using the TLS passthrough functionality, TLS encryption cannot be disabled when exposing Kafka using Ingress.
For more information about enabling TLS passthrough, see TLS passthrough documentation.
Prerequisites
-
Kubernetes cluster
-
Deployed NGINX Ingress Controller for Kubernetes with TLS passthrough enabled
-
A running Cluster Operator
Procedure
-
Configure a
Kafkaresource with an external listener set to theingresstype.Specify the Ingress hosts for the bootstrap service and Kafka brokers.
For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... listeners: - name: external port: 9094 type: ingress tls: true authentication: type: tls configuration: (1) bootstrap: host: bootstrap.myingress.com brokers: - broker: 0 host: broker-0.myingress.com - broker: 1 host: broker-1.myingress.com - broker: 2 host: broker-2.myingress.com # ... zookeeper: # ...-
Ingress hosts for the bootstrap service and Kafka brokers.
-
-
Create or update the resource.
kubectl apply -f KAFKA-CONFIG-FILEClusterIPtype services are created for each Kafka broker, as well as an additional bootstrap service. These services are used by the Ingress controller to route traffic to the Kafka brokers. AnIngressresource is also created for each service to expose them using the Ingress controller. The Ingress hosts are propagated to thestatusof each service.The cluster CA certificate to verify the identity of the kafka brokers is also created with the same name as the
Kafkaresource.Use the address for the bootstrap host you specified in the
configurationand port 443 (BOOTSTRAP-HOST:443) in your Kafka client as the bootstrap address to connect to the Kafka cluster. -
Extract the public certificate of the broker certificate authority.
kubectl get secret KAFKA-CLUSTER-NAME-cluster-ca-cert -o jsonpath='{.data.ca\.crt}' | base64 -d > ca.crtUse the extracted certificate in your Kafka client to configure the TLS connection. If you enabled any authentication, you will also need to configure SASL or TLS authentication.
3.4. Accessing Kafka using OpenShift routes
This procedure describes how to access a Strimzi Kafka cluster from an external client outside of OpenShift using routes.
To connect to a broker, you need a hostname for the route bootstrap address, as well as the certificate used for TLS encryption.
For access using routes, the port is always 443.
Prerequisites
-
An OpenShift cluster
-
A running Cluster Operator
Procedure
-
Configure a
Kafkaresource with an external listener set to theroutetype.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: labels: app: my-cluster name: my-cluster namespace: myproject spec: kafka: # ... listeners: - name: listener1 port: 9094 type: route tls: true # ... # ... zookeeper: # ...WarningAn OpenShift Route address comprises the name of the Kafka cluster, the name of the listener, and the name of the namespace it is created in. For example, my-cluster-kafka-listener1-bootstrap-myproject(CLUSTER-NAME-kafka-LISTENER-NAME-bootstrap-NAMESPACE). Be careful that the whole length of the address does not exceed a maximum limit of 63 characters. -
Create or update the resource.
kubectl apply -f KAFKA-CONFIG-FILEClusterIPtype services are created for each Kafka broker, as well as an external bootstrap service. The services route the traffic from the OpenShift Routes to the Kafka brokers. An OpenShiftRouteresource is also created for each service to expose them using the HAProxy load balancer. DNS addresses used for connection are propagated to thestatusof each service.The cluster CA certificate to verify the identity of the kafka brokers is also created with the same name as the
Kafkaresource. -
Retrieve the address of the bootstrap service you can use to access the Kafka cluster from the status of the
Kafkaresource.kubectl get kafka KAFKA-CLUSTER-NAME -o=jsonpath='{.status.listeners[?(@.type=="external")].bootstrapServers}{"\n"}' -
Extract the public certificate of the broker certification authority.
kubectl get secret KAFKA-CLUSTER-NAME-cluster-ca-cert -o jsonpath='{.data.ca\.crt}' | base64 -d > ca.crtUse the extracted certificate in your Kafka client to configure TLS connection. If you enabled any authentication, you will also need to configure SASL or TLS authentication.
4. Managing secure access to Kafka
You can secure your Kafka cluster by managing the access each client has to the Kafka brokers.
A secure connection between Kafka brokers and clients can encompass:
-
Encryption for data exchange
-
Authentication to prove identity
-
Authorization to allow or decline actions executed by users
This chapter explains how to set up secure connections between Kafka brokers and clients, with sections describing:
-
Security options for Kafka clusters and clients
-
How to secure Kafka brokers
-
How to use an authorization server for OAuth 2.0 token-based authentication and authorization
4.1. Security options for Kafka
Use the Kafka resource to configure the mechanisms used for Kafka authentication and authorization.
4.1.1. Listener authentication
For clients inside the Kubernetes cluster, you can create plain (without encryption) or tls internal listeners.
For clients outside the Kubernetes cluster, you create external listeners and specify a connection mechanism,
which can be nodeport, loadbalancer, ingress or route (on OpenShift).
For more information on the configuration options for connecting an external client, see Configuring external listeners.
Supported authentication options:
-
Mutual TLS authentication (only on the listeners with TLS enabled encryption)
-
SCRAM-SHA-512 authentication
The authentication option you choose depends on how you wish to authenticate client access to Kafka brokers.

Figure 3. Kafka listener authentication options
The listener authentication property is used to specify an authentication mechanism specific to that listener.
If no authentication property is specified then the listener does not authenticate clients which connect through that listener.
The listener will accept all connections without authentication.
Authentication must be configured when using the User Operator to manage KafkaUsers.
The following example shows:
-
A
plainlistener configured for SCRAM-SHA-512 authentication -
A
tlslistener with mutual TLS authentication -
An
externallistener with mutual TLS authentication
Each listener is configured with a unique name and port within a Kafka cluster.
|
Note
|
Listeners cannot be configured to use the ports set aside for interbroker communication (9091) and metrics (9404). |
An example showing listener authentication configuration
# ...
listeners:
- name: plain
port: 9092
type: internal
tls: true
authentication:
type: scram-sha-512
- name: tls
port: 9093
type: internal
tls: true
authentication:
type: tls
- name: external
port: 9094
type: loadbalancer
tls: true
authentication:
type: tls
# ...Mutual TLS authentication
Mutual TLS authentication is always used for the communication between Kafka brokers and ZooKeeper pods.
Strimzi can configure Kafka to use TLS (Transport Layer Security) to provide encrypted communication between Kafka brokers and clients either with or without mutual authentication. For mutual, or two-way, authentication, both the server and the client present certificates. When you configure mutual authentication, the broker authenticates the client (client authentication) and the client authenticates the broker (server authentication).
|
Note
|
TLS authentication is more commonly one-way, with one party authenticating the identity of another. For example, when HTTPS is used between a web browser and a web server, the browser obtains proof of the identity of the web server. |
SCRAM-SHA-512 authentication
SCRAM (Salted Challenge Response Authentication Mechanism) is an authentication protocol that can establish mutual authentication using passwords. Strimzi can configure Kafka to use SASL (Simple Authentication and Security Layer) SCRAM-SHA-512 to provide authentication on both unencrypted and encrypted client connections.
When SCRAM-SHA-512 authentication is used with a TLS client connection, the TLS protocol provides the encryption, but is not used for authentication.
The following properties of SCRAM make it safe to use SCRAM-SHA-512 even on unencrypted connections:
-
The passwords are not sent in the clear over the communication channel. Instead the client and the server are each challenged by the other to offer proof that they know the password of the authenticating user.
-
The server and client each generate a new challenge for each authentication exchange. This means that the exchange is resilient against replay attacks.
When a KafkaUser.spec.authentication.type is configured with scram-sha-512 the User Operator will generate a random 12-character password consisting of upper and lowercase ASCII letters and numbers.
Network policies
Strimzi automatically creates a NetworkPolicy resource for every listener that is enabled on a Kafka broker.
By default, a NetworkPolicy grants access to a listener to all applications and namespaces.
If you want to restrict access to a listener at the network level to only selected applications or namespaces,
use the networkPolicyPeers property.
Use network policies as part of the listener authentication configuration.
Each listener can have a different networkPolicyPeers configuration.
For more information, refer to the Listener network policies section and the NetworkPolicyPeer API reference.
|
Note
|
Your configuration of Kubernetes must support ingress NetworkPolicies in order to use network policies in Strimzi.
|
Additional listener configuration options
You can use the properties of the GenericKafkaListenerConfiguration schema to add further configuration to listeners.
4.1.2. Kafka authorization
You can configure authorization for Kafka brokers using the authorization property in the Kafka.spec.kafka resource.
If the authorization property is missing, no authorization is enabled and clients have no restrictions.
When enabled, authorization is applied to all enabled listeners.
The authorization method is defined in the type field.
Supported authorization options:
-
OAuth 2.0 authorization (if you are using OAuth 2.0 token based authentication)

Figure 4. Kafka cluster authorization options
Super users
Super users can access all resources in your Kafka cluster regardless of any access restrictions, and are supported by all authorization mechanisms.
To designate super users for a Kafka cluster, add a list of user principals to the superUsers property.
If a user uses TLS client authentication, their username is the common name from their certificate subject prefixed with CN=.
An example configuration with super users
authorization:
type: simple
superUsers:
- CN=client_1
- user_2
- CN=client_34.2. Security options for Kafka clients
Use the KafkaUser resource to configure the authentication mechanism, authorization mechanism, and access rights for Kafka clients.
In terms of configuring security, clients are represented as users.
You can authenticate and authorize user access to Kafka brokers. Authentication permits access, and authorization constrains the access to permissible actions.
You can also create super users that have unconstrained access to Kafka brokers.
The authentication and authorization mechanisms must match the specification for the listener used to access the Kafka brokers.
4.2.1. Identifying a Kafka cluster for user handling
A KafkaUser resource includes a label that defines the appropriate name of the Kafka cluster (derived from the name of the Kafka resource) to which it belongs.
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaUser
metadata:
name: my-user
labels:
strimzi.io/cluster: my-clusterThe label is used by the User Operator to identify the KafkaUser resource and create a new user, and also in subsequent handling of the user.
If the label does not match the Kafka cluster, the User Operator cannot identify the KafkaUser and the user is not created.
If the status of the KafkaUser resource remains empty, check your label.
4.2.2. User authentication
User authentication is configured using the authentication property in KafkaUser.spec.
The authentication mechanism enabled for the user is specified using the type field.
Supported authentication mechanisms:
-
TLS client authentication
-
SCRAM-SHA-512 authentication
When no authentication mechanism is specified, the User Operator does not create the user or its credentials.
Additional resources
TLS Client Authentication
To use TLS client authentication, you set the type field to tls.
An example
KafkaUser with TLS client authentication enabledapiVersion: kafka.strimzi.io/v1beta1
kind: KafkaUser
metadata:
name: my-user
labels:
strimzi.io/cluster: my-cluster
spec:
authentication:
type: tls
# ...When the user is created by the User Operator, it creates a new Secret with the same name as the KafkaUser resource.
The Secret contains a private and public key for TLS client authentication.
The public key is contained in a user certificate, which is signed by the client Certificate Authority (CA).
All keys are in X.509 format.
Secrets provide private keys and certificates in PEM and PKCS #12 formats.
For more information on securing Kafka communication with Secrets, see Managing TLS certificates.
An example
Secret with user credentialsapiVersion: v1
kind: Secret
metadata:
name: my-user
labels:
strimzi.io/kind: KafkaUser
strimzi.io/cluster: my-cluster
type: Opaque
data:
ca.crt: # Public key of the client CA
user.crt: # User certificate that contains the public key of the user
user.key: # Private key of the user
user.p12: # PKCS #12 archive file for storing certificates and keys
user.password: # Password for protecting the PKCS #12 archive fileSCRAM-SHA-512 Authentication
To use the SCRAM-SHA-512 authentication mechanism, you set the type field to scram-sha-512.
An example
KafkaUser with SCRAM-SHA-512 authentication enabledapiVersion: kafka.strimzi.io/v1beta1
kind: KafkaUser
metadata:
name: my-user
labels:
strimzi.io/cluster: my-cluster
spec:
authentication:
type: scram-sha-512
# ...When the user is created by the User Operator, it creates a new secret with the same name as the KafkaUser resource.
The secret contains the generated password in the password key, which is encoded with base64.
In order to use the password, it must be decoded.
An example
Secret with user credentialsapiVersion: v1
kind: Secret
metadata:
name: my-user
labels:
strimzi.io/kind: KafkaUser
strimzi.io/cluster: my-cluster
type: Opaque
data:
password: Z2VuZXJhdGVkcGFzc3dvcmQ= (1)-
The generated password, base64 encoded.
Decoding the generated password:
echo "Z2VuZXJhdGVkcGFzc3dvcmQ=" | base64 --decode
4.2.3. User authorization
User authorization is configured using the authorization property in KafkaUser.spec.
The authorization type enabled for a user is specified using the type field.
To use simple authorization, you set the type property to simple in KafkaUser.spec.authorization.
Simple authorization uses the default Kafka authorization plugin, AclAuthorizer.
Alternatively, you can use OPA authorization, or if you are already using OAuth 2.0 token based authentication, you can also use OAuth 2.0 authorization.
If no authorization is specified, the User Operator does not provision any access rights for the user.
Whether such a KafkaUser can still access resources depends on the authorizer being used.
For example, for the AclAuthorizer this is determined by its allow.everyone.if.no.acl.found configuration.
ACL rules
AclAuthorizer uses ACL rules to manage access to Kafka brokers.
ACL rules grant access rights to the user, which you specify in the acls property.
For more information about the AclRule object, see the AclRule schema reference.
Super user access to Kafka brokers
If a user is added to a list of super users in a Kafka broker configuration,
the user is allowed unlimited access to the cluster regardless of any authorization constraints defined in ACLs in KafkaUser.
For more information on configuring super user access to brokers, see Kafka authorization.
User quotas
You can configure the spec for the KafkaUser resource to enforce quotas so that a user does not exceed access to Kafka brokers based on a byte threshold or a time limit of CPU utilization.
An example
KafkaUser with user quotasapiVersion: kafka.strimzi.io/v1beta1
kind: KafkaUser
metadata:
name: my-user
labels:
strimzi.io/cluster: my-cluster
spec:
# ...
quotas:
producerByteRate: 1048576 (1)
consumerByteRate: 2097152 (2)
requestPercentage: 55 (3)-
Byte-per-second quota on the amount of data the user can push to a Kafka broker
-
Byte-per-second quota on the amount of data the user can fetch from a Kafka broker
-
CPU utilization limit as a percentage of time for a client group
For more information on these properties, see the KafkaUserQuotas schema reference.
4.3. Securing access to Kafka brokers
To establish secure access to Kafka brokers, you configure and apply:
-
A
Kafkaresource to:-
Create listeners with a specified authentication type
-
Configure authorization for the whole Kafka cluster
-
-
A
KafkaUserresource to access the Kafka brokers securely through the listeners
Configure the Kafka resource to set up:
-
Listener authentication
-
Network policies that restrict access to Kafka listeners
-
Kafka authorization
-
Super users for unconstrained access to brokers
Authentication is configured independently for each listener. Authorization is always configured for the whole Kafka cluster.
The Cluster Operator creates the listeners and sets up the cluster and client certificate authority (CA) certificates to enable authentication within the Kafka cluster.
You can replace the certificates generated by the Cluster Operator by installing your own certificates. You can also configure your listener to use a Kafka listener certificate managed by an external Certificate Authority. Certificates are available in PKCS #12 format (.p12) and PEM (.crt) formats.
Use KafkaUser to enable the authentication and authorization mechanisms that a specific client uses to access Kafka.
Configure the KafkaUser resource to set up:
-
Authentication to match the enabled listener authentication
-
Authorization to match the enabled Kafka authorization
-
Quotas to control the use of resources by clients
The User Operator creates the user representing the client and the security credentials used for client authentication, based on the chosen authentication type.
Additional resources
For more information about the schema for:
-
Kafka, see theKafkaschema reference. -
KafkaUser, see theKafkaUserschema reference.
4.3.1. Securing Kafka brokers
This procedure shows the steps involved in securing Kafka brokers when running Strimzi.
The security implemented for Kafka brokers must be compatible with the security implemented for the clients requiring access.
-
Kafka.spec.kafka.listeners[*].authenticationmatchesKafkaUser.spec.authentication -
Kafka.spec.kafka.authorizationmatchesKafkaUser.spec.authorization
The steps show the configuration for simple authorization and a listener using TLS authentication.
For more information on listener configuration, see GenericKafkaListener schema reference.
Alternatively, you can use SCRAM-SHA or OAuth 2.0 for listener authentication, and OAuth 2.0 or OPA for Kafka authorization.
Procedure
-
Configure the
Kafkaresource.-
Configure the
authorizationproperty for authorization. -
Configure the
listenersproperty to create a listener with authentication.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... authorization: (1) type: simple superUsers: (2) - CN=client_1 - user_2 - CN=client_3 listeners: - name: tls port: 9093 type: internal tls: true authentication: type: tls (3) # ... zookeeper: # ...-
Authorization enables
simpleauthorization on the Kafka broker using theAclAuthorizerKafka plugin. -
List of user principals with unlimited access to Kafka. CN is the common name from the client certificate when TLS authentication is used.
-
Listener authentication mechanisms may be configured for each listener, and specified as mutual TLS, SCRAM-SHA-512 or token-based OAuth 2.0.
If you are configuring an external listener, the configuration is dependent on the chosen connection mechanism.
-
-
-
Create or update the
Kafkaresource.kubectl apply -f KAFKA-CONFIG-FILEThe Kafka cluster is configured with a Kafka broker listener using TLS authentication.
A service is created for each Kafka broker pod.
A service is created to serve as the bootstrap address for connection to the Kafka cluster.
The cluster CA certificate to verify the identity of the kafka brokers is also created with the same name as the
Kafkaresource.
4.3.2. Securing user access to Kafka
Use the properties of the KafkaUser resource to configure a Kafka user.
You can use kubectl apply to create or modify users, and kubectl delete to delete existing users.
For example:
-
kubectl apply -f USER-CONFIG-FILE -
kubectl delete KafkaUser USER-NAME
When you configure the KafkaUser authentication and authorization mechanisms, ensure they match the equivalent Kafka configuration:
-
KafkaUser.spec.authenticationmatchesKafka.spec.kafka.listeners[*].authentication -
KafkaUser.spec.authorizationmatchesKafka.spec.kafka.authorization
This procedure shows how a user is created with TLS authentication. You can also create a user with SCRAM-SHA authentication.
The authentication required depends on the type of authentication configured for the Kafka broker listener.
|
Note
|
Authentication between Kafka users and Kafka brokers depends on the authentication settings for each. For example, it is not possible to authenticate a user with TLS if it is not also enabled in the Kafka configuration. |
Prerequisites
-
A running Kafka cluster configured with a Kafka broker listener using TLS authentication and encryption.
-
A running User Operator (typically deployed with the Entity Operator).
The authentication type in KafkaUser should match the authentication configured in Kafka brokers.
Procedure
-
Configure the
KafkaUserresource.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: KafkaUser metadata: name: my-user labels: strimzi.io/cluster: my-cluster spec: authentication: (1) type: tls authorization: type: simple (2) acls: - resource: type: topic name: my-topic patternType: literal operation: Read - resource: type: topic name: my-topic patternType: literal operation: Describe - resource: type: group name: my-group patternType: literal operation: Read-
User authentication mechanism, defined as mutual
tlsorscram-sha-512. -
Simple authorization, which requires an accompanying list of ACL rules.
-
-
Create or update the
KafkaUserresource.kubectl apply -f USER-CONFIG-FILEThe user is created, as well as a Secret with the same name as the
KafkaUserresource. The Secret contains a private and public key for TLS client authentication.
For information on configuring a Kafka client with properties for secure connection to Kafka brokers, see Setting up access for clients outside of Kubernetes in the Deploying Strimzi Guide.
4.3.3. Restricting access to Kafka listeners using network policies
You can restrict access to a listener to only selected applications by using the networkPolicyPeers property.
Prerequisites
-
A Kubernetes cluster with support for Ingress NetworkPolicies.
-
The Cluster Operator is running.
Procedure
-
Open the
Kafkaresource. -
In the
networkPolicyPeersproperty, define the application pods or namespaces that will be allowed to access the Kafka cluster.For example, to configure a
tlslistener to allow connections only from application pods with the labelappset tokafka-client:apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: kafka: # ... listeners: - name: tls port: 9093 type: internal tls: true authentication: type: tls networkPolicyPeers: - podSelector: matchLabels: app: kafka-client # ... zookeeper: # ... -
Create or update the resource.
Use
kubectl apply:kubectl apply -f your-file
Additional resources
-
For more information about the schema, see the NetworkPolicyPeer API reference and the
GenericKafkaListenerschema reference.
4.4. Using OAuth 2.0 token-based authentication
Strimzi supports the use of OAuth 2.0 authentication using the SASL OAUTHBEARER mechanism.
OAuth 2.0 enables standardized token-based authentication and authorization between applications, using a central authorization server to issue tokens that grant limited access to resources.
You can configure OAuth 2.0 authentication, then OAuth 2.0 authorization.
OAuth 2.0 authentication can also be used in conjunction with simple or OPA-based Kafka authorization.
Using OAuth 2.0 token-based authentication, application clients can access resources on application servers (called resource servers) without exposing account credentials.
The application client passes an access token as a means of authenticating, which application servers can also use to determine the level of access to grant. The authorization server handles the granting of access and inquiries about access.
In the context of Strimzi:
-
Kafka brokers act as OAuth 2.0 resource servers
-
Kafka clients act as OAuth 2.0 application clients
Kafka clients authenticate to Kafka brokers. The brokers and clients communicate with the OAuth 2.0 authorization server, as necessary, to obtain or validate access tokens.
For a deployment of Strimzi, OAuth 2.0 integration provides:
-
Server-side OAuth 2.0 support for Kafka brokers
-
Client-side OAuth 2.0 support for Kafka MirrorMaker, Kafka Connect and the Kafka Bridge
Additional resources
4.4.1. OAuth 2.0 authentication mechanism
The Kafka SASL OAUTHBEARER mechanism is used to establish authenticated sessions with a Kafka broker.
A Kafka client initiates a session with the Kafka broker using the SASL OAUTHBEARER mechanism for credentials exchange, where credentials take the form of an access token.
Kafka brokers and clients need to be configured to use OAuth 2.0.
4.4.2. OAuth 2.0 Kafka broker configuration
Kafka broker configuration for OAuth 2.0 involves:
-
Creating the OAuth 2.0 client in the authorization server
-
Configuring OAuth 2.0 authentication in the Kafka custom resource
|
Note
|
In relation to the authorization server, Kafka brokers and Kafka clients are both regarded as OAuth 2.0 clients. |
OAuth 2.0 client configuration on an authorization server
To configure a Kafka broker to validate the token received during session initiation, the recommended approach is to create an OAuth 2.0 client definition in an authorization server, configured as confidential, with the following client credentials enabled:
-
Client ID of
kafka(for example) -
Client ID and Secret as the authentication mechanism
|
Note
|
You only need to use a client ID and secret when using a non-public introspection endpoint of the authorization server. The credentials are not typically required when using public authorization server endpoints, as with fast local JWT token validation. |
OAuth 2.0 authentication configuration in the Kafka cluster
To use OAuth 2.0 authentication in the Kafka cluster, you specify, for example, a TLS listener configuration for your Kafka cluster custom resource with the authentication method oauth:
Assigining the authentication method type for OAuth 2.0
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
kafka:
# ...
listeners:
- name: tls
port: 9093
type: internal
tls: true
authentication:
type: oauth
#...You can configure plain, tls and external listeners,
but it is recommended not to use plain listeners or external listeners with disabled TLS encryption with OAuth 2.0 as this creates a vulnerability to network eavesdropping and unauthorized access through token theft.
You configure an external listener with type: oauth for a secure transport layer to communicate with the client.
Using OAuth 2.0 with an external listener
# ...
listeners:
- name: external
port: 9094
type: loadbalancer
tls: true
authentication:
type: oauth
#...The tls property is false by default, so it must be enabled.
When you have defined the type of authentication as OAuth 2.0, you add configuration based on the type of validation, either as fast local JWT validation or token validation using an introspection endpoint.
The procedure to configure OAuth 2.0 for listeners, with descriptions and examples, is described in Configuring OAuth 2.0 support for Kafka brokers.
Fast local JWT token validation configuration
Fast local JWT token validation checks a JWT token signature locally.
The local check ensures that a token:
-
Conforms to type by containing a (typ) claim value of
Bearerfor an access token -
Is valid (not expired)
-
Has an issuer that matches a
validIssuerURI
You specify a validIssuerURI attribute when you configure the listener, so that any tokens not issued by the authorization server are rejected.
The authorization server does not need to be contacted during fast local JWT token validation.
You activate fast local JWT token validation by specifying a jwksEndpointUri attribute, the endpoint exposed by the OAuth 2.0 authorization server.
The endpoint contains the public keys used to validate signed JWT tokens, which are sent as credentials by Kafka clients.
|
Note
|
All communication with the authorization server should be performed using TLS encryption. |
You can configure a certificate truststore as a Kubernetes Secret in your Strimzi project namespace, and use a tlsTrustedCertificates attribute to point to the Kubernetes Secret containing the truststore file.
You might want to configure a userNameClaim to properly extract a username from the JWT token.
If you want to use Kafka ACL authorization, you need to identify the user by their username during authentication.
(The sub claim in JWT tokens is typically a unique ID, not a username.)
Example configuration for fast local JWT token validation
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
kafka:
#...
listeners:
- name: tls
port: 9093
type: internal
tls: true
authentication:
type: oauth
validIssuerUri: <https://<auth-server-address>/auth/realms/tls>
jwksEndpointUri: <https://<auth-server-address>/auth/realms/tls/protocol/openid-connect/certs>
userNameClaim: preferred_username
maxSecondsWithoutReauthentication: 3600
tlsTrustedCertificates:
- secretName: oauth-server-cert
certificate: ca.crt
#...OAuth 2.0 introspection endpoint configuration
Token validation using an OAuth 2.0 introspection endpoint treats a received access token as opaque. The Kafka broker sends an access token to the introspection endpoint, which responds with the token information necessary for validation. Importantly, it returns up-to-date information if the specific access token is valid, and also information about when the token expires.
To configure OAuth 2.0 introspection-based validation, you specify an introspectionEndpointUri attribute rather than the jwksEndpointUri attribute specified for fast local JWT token validation.
Depending on the authorization server, you typically have to specify a clientId and clientSecret, because the introspection endpoint is usually protected.
Example configuration for an introspection endpoint
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
kafka:
listeners:
- name: tls
port: 9093
type: internal
tls: true
authentication:
type: oauth
clientId: kafka-broker
clientSecret:
secretName: my-cluster-oauth
key: clientSecret
validIssuerUri: <https://<auth-server-address>/auth/realms/tls>
introspectionEndpointUri: <https://<auth-server-address>/auth/realms/tls/protocol/openid-connect/token/introspect>
userNameClaim: preferred_username
maxSecondsWithoutReauthentication: 3600
tlsTrustedCertificates:
- secretName: oauth-server-cert
certificate: ca.crt4.4.3. Session re-authentication for Kafka brokers
The Kafka SASL OAUTHBEARER mechanism, which is used for OAuth 2.0 authentication in Strimzi, supports a Kafka feature called the re-authentication mechanism.
When the re-authentication mechanism is enabled in the configuration of an oauth type listener, the broker’s authenticated session expires when the access token expires.
The client must then re-authenticate to the existing session by sending a new, valid access token to the broker, without dropping the connection.
If token validation is successful, a new client session is started using the existing connection. If the client fails to re-authenticate, the broker will close the connection if further attempts are made to send or receive messages. Java clients that use Kafka client library 2.2 or later automatically re-authenticate if the re-authentication mechanism is enabled on the broker.
You enable session re-authentication in the Kafka resource. Set the maxSecondsWithoutReauthentication property for a TLS listener with type: oauth authentication.
Session re-authentication is supported for both types of token validation (fast local JWT and introspection endpoint). For an example configuration, see Configuring OAuth 2.0 support for Kafka brokers.
For more information about the re-authentication mechanism, which was added in Kafka version 2.2, see KIP-368.
4.4.4. OAuth 2.0 Kafka client configuration
A Kafka client is configured with either:
-
The credentials required to obtain a valid access token from an authorization server (client ID and Secret)
-
A valid long-lived access token or refresh token, obtained using tools provided by an authorization server
The only information ever sent to the Kafka broker is an access token. The credentials used to authenticate with the authorization server to obtain the access token are never sent to the broker.
When a client obtains an access token, no further communication with the authorization server is needed.
The simplest mechanism is authentication with a client ID and Secret. Using a long-lived access token, or a long-lived refresh token, adds more complexity because there is an additional dependency on authorization server tools.
|
Note
|
If you are using long-lived access tokens, you may need to configure the client in the authorization server to increase the maximum lifetime of the token. |
If the Kafka client is not configured with an access token directly, the client exchanges credentials for an access token during Kafka session initiation by contacting the authorization server. The Kafka client exchanges either:
-
Client ID and Secret
-
Client ID, refresh token, and (optionally) a Secret
4.4.5. OAuth 2.0 client authentication flow
In this section, we explain and visualize the communication flow between Kafka client, Kafka broker, and authorization server during Kafka session initiation. The flow depends on the client and server configuration.
When a Kafka client sends an access token as credentials to a Kafka broker, the token needs to be validated.
Depending on the authorization server used, and the configuration options available, you may prefer to use:
-
Fast local token validation based on JWT signature checking and local token introspection, without contacting the authorization server
-
An OAuth 2.0 introspection endpoint provided by the authorization server
Using fast local token validation requires the authorization server to provide a JWKS endpoint with public certificates that are used to validate signatures on the tokens.
Another option is to use an OAuth 2.0 introspection endpoint on the authorization server. Each time a new Kafka broker connection is established, the broker passes the access token received from the client to the authorization server, and checks the response to confirm whether or not the token is valid.
Kafka client credentials can also be configured for:
-
Direct local access using a previously generated long-lived access token
-
Contact with the authorization server for a new access token to be issued
|
Note
|
An authorization server might only allow the use of opaque access tokens, which means that local token validation is not possible. |
Example client authentication flows
Here you can see the communication flows, for different configurations of Kafka clients and brokers, during Kafka session authentication.
-
Client using client ID and secret, with broker delegating validation to authorization server
-
Client using client ID and secret, with broker performing fast local token validation
-
Client using long-lived access token, with broker delegating validation to authorization server
-
Client using long-lived access token, with broker performing fast local validation
Client using client ID and secret, with broker delegating validation to authorization server
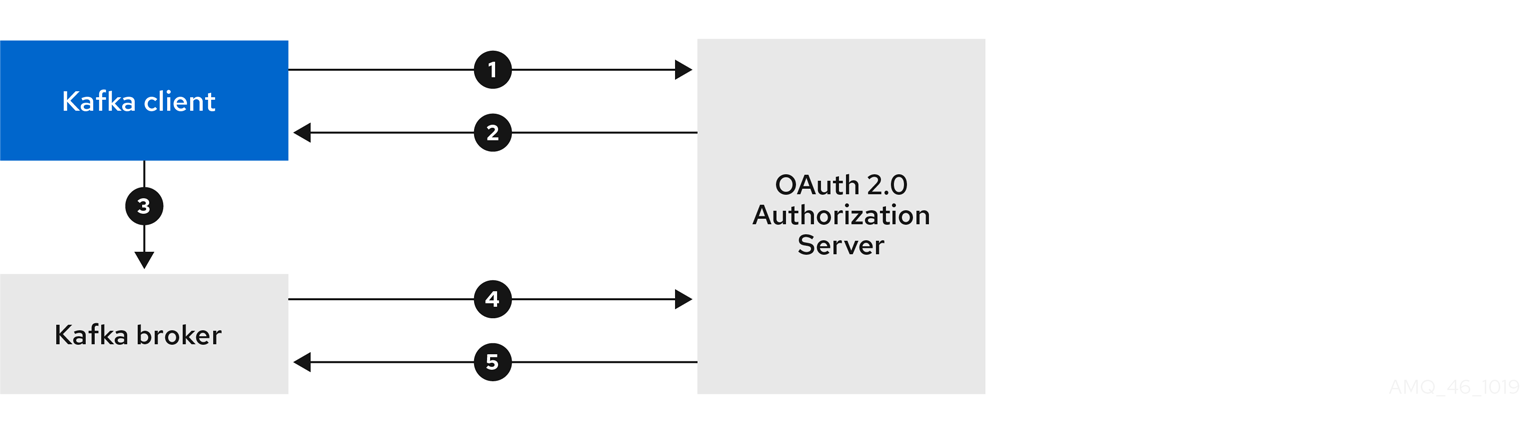
-
Kafka client requests access token from authorization server, using client ID and secret, and optionally a refresh token.
-
Authorization server generates a new access token.
-
Kafka client authenticates with the Kafka broker using the SASL OAUTHBEARER mechanism to pass the access token.
-
Kafka broker validates the access token by calling a token introspection endpoint on authorization server, using its own client ID and secret.
-
Kafka client session is established if the token is valid.
Client using client ID and secret, with broker performing fast local token validation
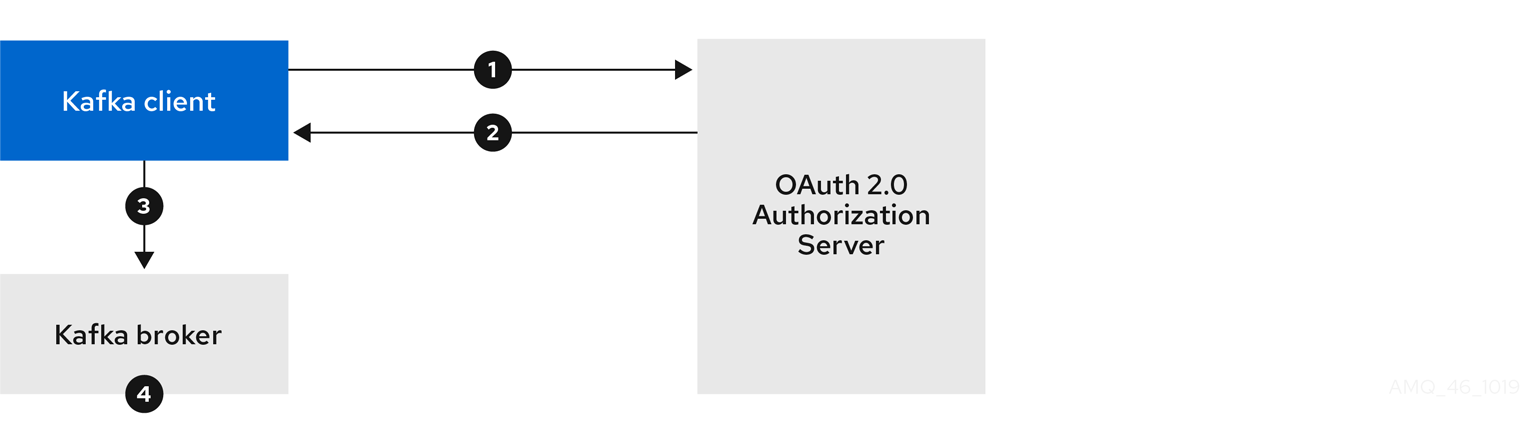
-
Kafka client authenticates with authorization server from the token endpoint, using a client ID and secret, and optionally a refresh token.
-
Authorization server generates a new access token.
-
Kafka client authenticates with the Kafka broker using the SASL OAUTHBEARER mechanism to pass the access token.
-
Kafka broker validates the access token locally using a JWT token signature check, and local token introspection.
Client using long-lived access token, with broker delegating validation to authorization server
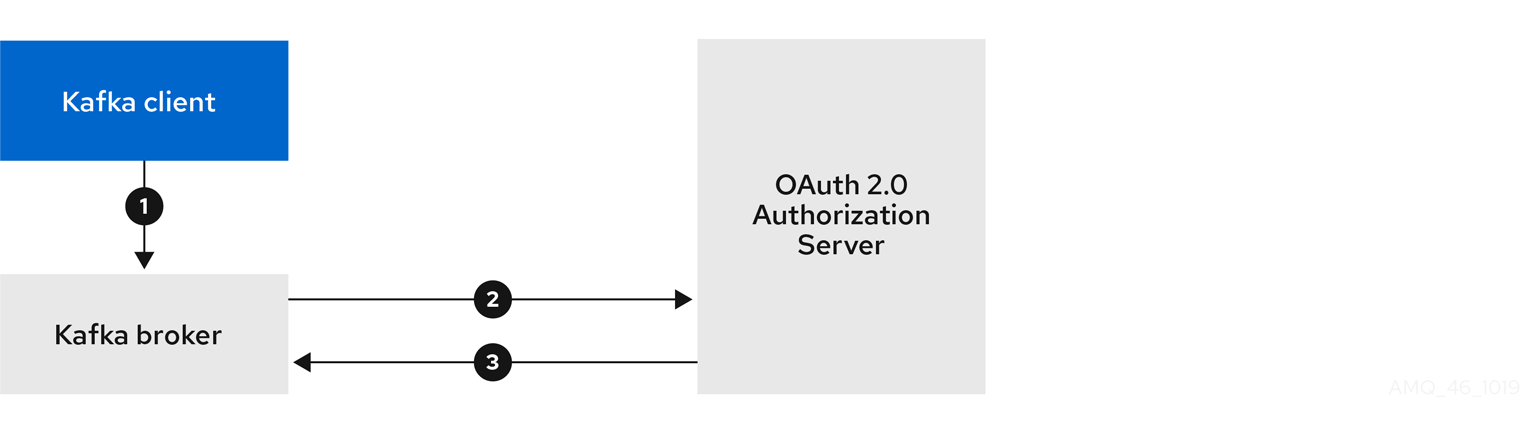
-
Kafka client authenticates with the Kafka broker using the SASL OAUTHBEARER mechanism to pass the long-lived access token.
-
Kafka broker validates the access token by calling a token introspection endpoint on authorization server, using its own client ID and secret.
-
Kafka client session is established if the token is valid.
Client using long-lived access token, with broker performing fast local validation

-
Kafka client authenticates with the Kafka broker using the SASL OAUTHBEARER mechanism to pass the long-lived access token.
-
Kafka broker validates the access token locally using JWT token signature check, and local token introspection.
|
Warning
|
Fast local JWT token signature validation is suitable only for short-lived tokens as there is no check with the authorization server if a token has been revoked. Token expiration is written into the token, but revocation can happen at any time, so cannot be accounted for without contacting the authorization server. Any issued token would be considered valid until it expires. |
4.4.6. Configuring OAuth 2.0 authentication
OAuth 2.0 is used for interaction between Kafka clients and Strimzi components.
In order to use OAuth 2.0 for Strimzi, you must:
Configuring an OAuth 2.0 authorization server
This procedure describes in general what you need to do to configure an authorization server for integration with Strimzi.
These instructions are not product specific.
The steps are dependent on the chosen authorization server. Consult the product documentation for the authorization server for information on how to set up OAuth 2.0 access.
|
Note
|
If you already have an authorization server deployed, you can skip the deployment step and use your current deployment. |
Procedure
-
Deploy the authorization server to your cluster.
-
Access the CLI or admin console for the authorization server to configure OAuth 2.0 for Strimzi.
Now prepare the authorization server to work with Strimzi.
-
Configure a
kafka-brokerclient. -
Configure clients for each Kafka client component of your application.
What to do next
After deploying and configuring the authorization server, configure the Kafka brokers to use OAuth 2.0.
Configuring OAuth 2.0 support for Kafka brokers
This procedure describes how to configure Kafka brokers so that the broker listeners are enabled to use OAuth 2.0 authentication using an authorization server.
We advise use of OAuth 2.0 over an encrypted interface through configuration of TLS listeners. Plain listeners are not recommended.
If the authorization server is using certificates signed by the trusted CA and matching the OAuth 2.0 server hostname, TLS connection works using the default settings. Otherwise, you may need to configure the truststore with prober certificates or disable the certificate hostname validation.
When configuring the Kafka broker you have two options for the mechanism used to validate the access token during OAuth 2.0 authentication of the newly connected Kafka client:
Before you start
For more information on the configuration of OAuth 2.0 authentication for Kafka broker listeners, see:
Prerequisites
-
Strimzi and Kafka are running
-
An OAuth 2.0 authorization server is deployed
Procedure
-
Update the Kafka broker configuration (
Kafka.spec.kafka) of yourKafkaresource in an editor.kubectl edit kafka my-cluster -
Configure the Kafka broker
listenersconfiguration.The configuration for each type of listener does not have to be the same, as they are independent.
The examples here show the configuration options as configured for external listeners.
Example 1: Configuring fast local JWT token validation#... - name: external port: 9094 type: loadbalancer tls: true authentication: type: oauth (1) validIssuerUri: <https://<auth-server-address>/auth/realms/external> (2) jwksEndpointUri: <https://<auth-server-address>/auth/realms/external/protocol/openid-connect/certs> (3) userNameClaim: preferred_username (4) maxSecondsWithoutReauthentication: 3600 (5) tlsTrustedCertificates: (6) - secretName: oauth-server-cert certificate: ca.crt disableTlsHostnameVerification: true (7) jwksExpirySeconds: 360 (8) jwksRefreshSeconds: 300 (9) jwksMinRefreshPauseSeconds: 1 (10) enableECDSA: "true" (11)-
Listener type set to
oauth. -
URI of the token issuer used for authentication.
-
URI of the JWKS certificate endpoint used for local JWT validation.
-
The token claim (or key) that contains the actual user name in the token. The user name is the principal used to identify the user. The
userNameClaimvalue will depend on the authentication flow and the authorization server used. -
(Optional) Activates the Kafka re-authentication mechanism that enforces session expiry to the same length of time as the access token. If the specified value is less than the time left for the access token to expire, then the client will have to re-authenticate before the actual token expiry. By default, the session does not expire when the access token expires, and the client does not attempt re-authentication.
-
(Optional) Trusted certificates for TLS connection to the authorization server.
-
(Optional) Disable TLS hostname verification. Default is
false. -
The duration the JWKS certificates are considered valid before they expire. Default is
360seconds. If you specify a longer time, consider the risk of allowing access to revoked certificates. -
The period between refreshes of JWKS certificates. The interval must be at least 60 seconds shorter than the expiry interval. Default is
300seconds. -
The minimum pause in seconds between consecutive attempts to refresh JWKS public keys. When an unknown signing key is encountered, the JWKS keys refresh is scheduled outside the regular periodic schedule with at least the specified pause since the last refresh attempt. The refreshing of keys follows the rule of exponential backoff, retrying on unsuccessful refreshes with ever increasing pause, until it reaches
jwksRefreshSeconds. The default value is 1. -
(Optional) If ECDSA is used for signing JWT tokens on authorization server, then this needs to be enabled. It installs additional crypto providers using BouncyCastle crypto library. Default is
false.
Example 2: Configuring token validation using an introspection endpoint- name: external port: 9094 type: loadbalancer tls: true authentication: type: oauth validIssuerUri: <https://<auth-server-address>/auth/realms/external> introspectionEndpointUri: <https://<auth-server-address>/auth/realms/external/protocol/openid-connect/token/introspect> (1) clientId: kafka-broker (2) clientSecret: (3) secretName: my-cluster-oauth key: clientSecret userNameClaim: preferred_username (4) maxSecondsWithoutReauthentication: 3600 (5)-
URI of the token introspection endpoint.
-
Client ID to identify the client.
-
Client Secret and client ID is used for authentication.
-
The token claim (or key) that contains the actual user name in the token. The user name is the principal used to identify the user. The
userNameClaimvalue will depend on the authorization server used. -
(Optional) Activates the Kafka re-authentication mechanism that enforces session expiry to the same length of time as the access token. If the specified value is less than the time left for the access token to expire, then the client will have to re-authenticate before the actual token expiry. By default, the session does not expire when the access token expires, and the client does not attempt re-authentication.
Depending on how you apply OAuth 2.0 authentication, and the type of authorization server, there are additional (optional) configuration settings you can use:
# ... authentication: type: oauth # ... checkIssuer: false (1) fallbackUserNameClaim: client_id (2) fallbackUserNamePrefix: client-account- (3) validTokenType: bearer (4) userInfoEndpointUri: https://OAUTH-SERVER-ADDRESS/auth/realms/external/protocol/openid-connect/userinfo (5)-
If your authorization server does not provide an
issclaim, it is not possible to perform an issuer check. In this situation, setcheckIssuertofalseand do not specify avalidIssuerUri. Default istrue. -
An authorization server may not provide a single attribute to identify both regular users and clients. When a client authenticates in its own name, the server might provide a client ID. When a user authenticates using a username and password, to obtain a refresh token or an access token, the server might provide a username attribute in addition to a client ID. Use this fallback option to specify the username claim (attribute) to use if a primary user ID attribute is not available.
-
In situations where
fallbackUserNameClaimis applicable, it may also be necessary to prevent name collisions between the values of the username claim, and those of the fallback username claim. Consider a situation where a client calledproducerexists, but also a regular user calledproducerexists. In order to differentiate between the two, you can use this property to add a prefix to the user ID of the client. -
(Only applicable when using
introspectionEndpointUri) Depending on the authorization server you are using, the introspection endpoint may or may not return the token type attribute, or it may contain different values. You can specify a valid token type value that the response from the introspection endpoint has to contain. -
(Only applicable when using
introspectionEndpointUri) The authorization server may be configured or implemented in such a way to not provide any identifiable information in an Introspection Endpoint response. In order to obtain the user ID, you can configure the URI of theuserinfoendpoint as a fallback. TheuserNameClaim,fallbackUserNameClaim, andfallbackUserNamePrefixsettings are applied to the response ofuserinfoendpoint.
-
-
Save and exit the editor, then wait for rolling updates to complete.
-
Check the update in the logs or by watching the pod state transitions:
kubectl logs -f ${POD_NAME} -c ${CONTAINER_NAME} kubectl get po -wThe rolling update configures the brokers to use OAuth 2.0 authentication.
What to do next
Configuring Kafka Java clients to use OAuth 2.0
This procedure describes how to configure Kafka producer and consumer APIs to use OAuth 2.0 for interaction with Kafka brokers.
Add a client callback plugin to your pom.xml file, and configure the system properties.
Prerequisites
-
Strimzi and Kafka are running
-
An OAuth 2.0 authorization server is deployed and configured for OAuth access to Kafka brokers
-
Kafka brokers are configured for OAuth 2.0
Procedure
-
Add the client library with OAuth 2.0 support to the
pom.xmlfile for the Kafka client:<dependency> <groupId>io.strimzi</groupId> <artifactId>kafka-oauth-client</artifactId> <version>0.6.0</version> </dependency> -
Configure the system properties for the callback:
For example:
System.setProperty(ClientConfig.OAUTH_TOKEN_ENDPOINT_URI, “https://<auth-server-address>/auth/realms/master/protocol/openid-connect/token”); (1) System.setProperty(ClientConfig.OAUTH_CLIENT_ID, "<client-name>"); (2) System.setProperty(ClientConfig.OAUTH_CLIENT_SECRET, "<client-secret>"); (3)-
URI of the authorization server token endpoint.
-
Client ID, which is the name used when creating the client in the authorization server.
-
Client secret created when creating the client in the authorization server.
-
-
Enable the SASL OAUTHBEARER mechanism on a TLS encrypted connection in the Kafka client configuration:
For example:
props.put("sasl.jaas.config", "org.apache.kafka.common.security.oauthbearer.OAuthBearerLoginModule required;"); props.put("security.protocol", "SASL_SSL"); (1) props.put("sasl.mechanism", "OAUTHBEARER"); props.put("sasl.login.callback.handler.class", "io.strimzi.kafka.oauth.client.JaasClientOauthLoginCallbackHandler");-
Here we use
SASL_SSLfor use over TLS connections. UseSASL_PLAINTEXTover unencrypted connections.
-
-
Verify that the Kafka client can access the Kafka brokers.
What to do next
Configuring OAuth 2.0 for Kafka components
This procedure describes how to configure Kafka components to use OAuth 2.0 authentication using an authorization server.
You can configure authentication for:
-
Kafka Connect
-
Kafka MirrorMaker
-
Kafka Bridge
In this scenario, the Kafka component and the authorization server are running in the same cluster.
Before you start
For more information on the configuration of OAuth 2.0 authentication for Kafka components, see:
Prerequisites
-
Strimzi and Kafka are running
-
An OAuth 2.0 authorization server is deployed and configured for OAuth access to Kafka brokers
-
Kafka brokers are configured for OAuth 2.0
Procedure
-
Create a client secret and mount it to the component as an environment variable.
For example, here we are creating a client
Secretfor the Kafka Bridge:apiVersion: kafka.strimzi.io/v1beta1 kind: Secret metadata: name: my-bridge-oauth type: Opaque data: clientSecret: MGQ1OTRmMzYtZTllZS00MDY2LWI5OGEtMTM5MzM2NjdlZjQw (1)-
The
clientSecretkey must be in base64 format.
-
-
Create or edit the resource for the Kafka component so that OAuth 2.0 authentication is configured for the authentication property.
For OAuth 2.0 authentication, you can use:
-
Client ID and secret
-
Client ID and refresh token
-
Access token
-
TLS
For example, here OAuth 2.0 is assigned to the Kafka Bridge client using a client ID and secret, and TLS:
apiVersion: kafka.strimzi.io/v1beta1 kind: KafkaBridge metadata: name: my-bridge spec: # ... authentication: type: oauth (1) tokenEndpointUri: https://<auth-server-address>/auth/realms/master/protocol/openid-connect/token (2) clientId: kafka-bridge clientSecret: secretName: my-bridge-oauth key: clientSecret tlsTrustedCertificates: (3) - secretName: oauth-server-cert certificate: tls.crt-
Authentication type set to
oauth. -
URI of the token endpoint for authentication.
-
Trusted certificates for TLS connection to the authorization server.
Depending on how you apply OAuth 2.0 authentication, and the type of authorization server, there are additional configuration options you can use:
# ... spec: # ... authentication: # ... disableTlsHostnameVerification: true (1) checkAccessTokenType: false (2) accessTokenIsJwt: false (3) scope: any (4)-
(Optional) Disable TLS hostname verification. Default is
false. -
If the authorization server does not return a
typ(type) claim inside the JWT token, you can applycheckAccessTokenType: falseto skip the token type check. Default istrue. -
If you are using opaque tokens, you can apply
accessTokenIsJwt: falseso that access tokens are not treated as JWT tokens. -
(Optional) The
scopefor requesting the token from the token endpoint. An authorization server may require a client to specify the scope. In this case it isany.
-
-
Apply the changes to the deployment of your Kafka resource.
kubectl apply -f your-file -
Check the update in the logs or by watching the pod state transitions:
kubectl logs -f ${POD_NAME} -c ${CONTAINER_NAME} kubectl get pod -wThe rolling updates configure the component for interaction with Kafka brokers using OAuth 2.0 authentication.
4.4.7. Authorization server examples
When choosing an authorization server, consider the features that best support configuration of your chosen authentication flow.
For the purposes of testing OAuth 2.0 with Strimzi, Keycloak and ORY Hydra were implemented as the OAuth 2.0 authorization server.
For more information, see:
4.5. Using OAuth 2.0 token-based authorization
Strimzi supports the use of OAuth 2.0 token-based authorization through Keycloak Authorization Services, which allows you to manage security policies and permissions centrally.
Security policies and permissions defined in Keycloak are used to grant access to resources on Kafka brokers. Users and clients are matched against policies that permit access to perform specific actions on Kafka brokers.
Kafka allows all users full access to brokers by default,
and also provides the AclAuthorizer plugin to configure authorization based on Access Control Lists (ACLs).
ZooKeeper stores ACL rules that grant or deny access to resources based on username. However, OAuth 2.0 token-based authorization with Keycloak offers far greater flexibility on how you wish to implement access control to Kafka brokers. In addition, you can configure your Kafka brokers to use OAuth 2.0 authorization and ACLs.
Additional resources
4.5.1. OAuth 2.0 authorization mechanism
OAuth 2.0 authorization in Strimzi uses Keycloak server Authorization Services REST endpoints to extend token-based authentication with Keycloak by applying defined security policies on a particular user, and providing a list of permissions granted on different resources for that user. Policies use roles and groups to match permissions to users. OAuth 2.0 authorization enforces permissions locally based on the received list of grants for the user from Keycloak Authorization Services.
Kafka broker custom authorizer
A Keycloak authorizer (KeycloakRBACAuthorizer) is provided with Strimzi.
To be able to use the Keycloak REST endpoints for Authorization Services provided by Keycloak,
you configure a custom authorizer on the Kafka broker.
The authorizer fetches a list of granted permissions from the authorization server as needed, and enforces authorization locally on the Kafka Broker, making rapid authorization decisions for each client request.
4.5.2. Configuring OAuth 2.0 authorization support
This procedure describes how to configure Kafka brokers to use OAuth 2.0 authorization using Keycloak Authorization Services.
Before you begin
Consider the access you require or want to limit for certain users. You can use a combination of Keycloak groups, roles, clients, and users to configure access in Keycloak.
Typically, groups are used to match users based on organizational departments or geographical locations. And roles are used to match users based on their function.
With Keycloak, you can store users and groups in LDAP, whereas clients and roles cannot be stored this way. Storage and access to user data may be a factor in how you choose to configure authorization policies.
|
Note
|
Super users always have unconstrained access to a Kafka broker regardless of the authorization implemented on the Kafka broker. |
Prerequisites
-
Strimzi must be configured to use OAuth 2.0 with Keycloak for token-based authentication. You use the same Keycloak server endpoint when you set up authorization.
-
OAuth 2.0 authentication must be configured with the
maxSecondsWithoutReauthenticationoption to enable re-authentication. -
You need to understand how to manage policies and permissions for Keycloak Authorization Services, as described in the Keycloak documentation.
Procedure
-
Access the Keycloak Admin Console or use the Keycloak Admin CLI to enable Authorization Services for the Kafka broker client you created when setting up OAuth 2.0 authentication.
-
Use Authorization Services to define resources, authorization scopes, policies, and permissions for the client.
-
Bind the permissions to users and clients by assigning them roles and groups.
-
Configure the Kafka brokers to use Keycloak authorization by updating the Kafka broker configuration (
Kafka.spec.kafka) of yourKafkaresource in an editor.kubectl edit kafka my-cluster -
Configure the Kafka broker
kafkaconfiguration to usekeycloakauthorization, and to be able to access the authorization server and Authorization Services.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: kafka # ... authorization: type: keycloak (1) tokenEndpointUri: <https://<auth-server-address>/auth/realms/external/protocol/openid-connect/token> (2) clientId: kafka (3) delegateToKafkaAcls: false (4) disableTlsHostnameVerification: false (5) superUsers: (6) - CN=fred - sam - CN=edward tlsTrustedCertificates: (7) - secretName: oauth-server-cert certificate: ca.crt grantsRefreshPeriodSeconds: 60 (8) grantsRefreshPoolSize: 5 (9) #...-
Type
keycloakenables Keycloak authorization. -
URI of the Keycloak token endpoint. For production, always use HTTPs.
-
The client ID of the OAuth 2.0 client definition in Keycloak that has Authorization Services enabled. Typically,
kafkais used as the ID. -
(Optional) Delegate authorization to Kafka
AclAuthorizerif access is denied by Keycloak Authorization Services policies. Default isfalse. -
(Optional) Disable TLS hostname verification. Default is
false. -
(Optional) Designated super users.
-
(Optional) Trusted certificates for TLS connection to the authorization server.
-
(Optional) The time between two consecutive grants refresh runs. That is the maximum time for active sessions to detect any permissions changes for the user on Keycloak. The default value is 60.
-
(Optional) The number of threads to use to refresh (in parallel) the grants for the active sessions. The default value is 5.
-
-
Save and exit the editor, then wait for rolling updates to complete.
-
Check the update in the logs or by watching the pod state transitions:
kubectl logs -f ${POD_NAME} -c kafka kubectl get po -wThe rolling update configures the brokers to use OAuth 2.0 authorization.
-
Verify the configured permissions by accessing Kafka brokers as clients or users with specific roles, making sure they have the necessary access, or do not have the access they are not supposed to have.
5. Using Strimzi Operators
Use the Strimzi operators to manage your Kafka cluster, and Kafka topics and users.
5.1. Using the Cluster Operator
The Cluster Operator is used to deploy a Kafka cluster and other Kafka components.
The Cluster Operator is deployed using YAML installation files.
For information on deploying the Cluster Operator, see Deploying the Cluster Operator in the Deploying Strimzi guide.
For information on the deployment options available for Kafka, see Kafka Cluster configuration.
|
Note
|
On OpenShift, a Kafka Connect deployment can incorporate a Source2Image feature to provide a convenient way to add additional connectors. |
5.1.1. Cluster Operator configuration
The Cluster Operator can be configured through the following supported environment variables and through the logging configuration.
STRIMZI_NAMESPACE-
A comma-separated list of namespaces that the operator should operate in. When not set, set to empty string, or to
*the Cluster Operator will operate in all namespaces. The Cluster Operator deployment might use the Kubernetes Downward API to set this automatically to the namespace the Cluster Operator is deployed in. See the example below:env: - name: STRIMZI_NAMESPACE valueFrom: fieldRef: fieldPath: metadata.namespace -
STRIMZI_FULL_RECONCILIATION_INTERVAL_MS -
Optional, default is 120000 ms. The interval between periodic reconciliations, in milliseconds.
STRIMZI_OPERATION_TIMEOUT_MS-
Optional, default 300000 ms. The timeout for internal operations, in milliseconds. This value should be increased when using Strimzi on clusters where regular Kubernetes operations take longer than usual (because of slow downloading of Docker images, for example).
STRIMZI_KAFKA_IMAGES-
Required. This provides a mapping from Kafka version to the corresponding Docker image containing a Kafka broker of that version. The required syntax is whitespace or comma separated
<version>=<image>pairs. For example2.5.0=strimzi/kafka:0.20.0-kafka-2.5.0, 2.6.0=strimzi/kafka:0.20.0-kafka-2.6.0. This is used when aKafka.spec.kafka.versionproperty is specified but not theKafka.spec.kafka.image, as described in Container images. STRIMZI_DEFAULT_KAFKA_INIT_IMAGE-
Optional, default
strimzi/operator:0.20.0. The image name to use as default for the init container started before the broker for initial configuration work (that is, rack support), if no image is specified as thekafka-init-imagein the Container images. STRIMZI_KAFKA_CONNECT_IMAGES-
Required. This provides a mapping from the Kafka version to the corresponding Docker image containing a Kafka connect of that version. The required syntax is whitespace or comma separated
<version>=<image>pairs. For example2.5.0=strimzi/kafka:0.20.0-kafka-2.5.0, 2.6.0=strimzi/kafka:0.20.0-kafka-2.6.0. This is used when aKafkaConnect.spec.versionproperty is specified but not theKafkaConnect.spec.image, as described inimage. STRIMZI_KAFKA_CONNECT_S2I_IMAGES-
Required. This provides a mapping from the Kafka version to the corresponding Docker image containing a Kafka connect of that version. The required syntax is whitespace or comma separated
<version>=<image>pairs. For example2.5.0=strimzi/kafka:0.20.0-kafka-2.5.0, 2.6.0=strimzi/kafka:0.20.0-kafka-2.6.0. This is used when aKafkaConnectS2I.spec.versionproperty is specified but not theKafkaConnectS2I.spec.image, as described inimage. STRIMZI_KAFKA_MIRROR_MAKER_IMAGES-
Required. This provides a mapping from the Kafka version to the corresponding Docker image containing a Kafka mirror maker of that version. The required syntax is whitespace or comma separated
<version>=<image>pairs. For example2.5.0=strimzi/kafka:0.20.0-kafka-2.5.0, 2.6.0=strimzi/kafka:0.20.0-kafka-2.6.0. This is used when aKafkaMirrorMaker.spec.versionproperty is specified but not theKafkaMirrorMaker.spec.image, as described inimage. STRIMZI_DEFAULT_TOPIC_OPERATOR_IMAGE-
Optional, default
strimzi/operator:0.20.0. The image name to use as the default when deploying the topic operator, if no image is specified as theKafka.spec.entityOperator.topicOperator.imagein the Container images of theKafkaresource. STRIMZI_DEFAULT_USER_OPERATOR_IMAGE-
Optional, default
strimzi/operator:0.20.0. The image name to use as the default when deploying the user operator, if no image is specified as theKafka.spec.entityOperator.userOperator.imagein the Container images of theKafkaresource. STRIMZI_DEFAULT_TLS_SIDECAR_ENTITY_OPERATOR_IMAGE-
Optional, default
strimzi/kafka:0.20.0-kafka-2.6.0. The image name to use as the default when deploying the sidecar container which provides TLS support for the Entity Operator, if no image is specified as theKafka.spec.entityOperator.tlsSidecar.imagein the Container images. STRIMZI_IMAGE_PULL_POLICY-
Optional. The
ImagePullPolicywhich will be applied to containers in all pods managed by Strimzi Cluster Operator. The valid values areAlways,IfNotPresent, andNever. If not specified, the Kubernetes defaults will be used. Changing the policy will result in a rolling update of all your Kafka, Kafka Connect, and Kafka MirrorMaker clusters. STRIMZI_IMAGE_PULL_SECRETS-
Optional. A comma-separated list of
Secretnames. The secrets referenced here contain the credentials to the container registries where the container images are pulled from. The secrets are used in theimagePullSecretsfield for allPodscreated by the Cluster Operator. Changing this list results in a rolling update of all your Kafka, Kafka Connect, and Kafka MirrorMaker clusters. STRIMZI_KUBERNETES_VERSION-
Optional. Overrides the Kubernetes version information detected from the API server. See the example below:
env: - name: STRIMZI_KUBERNETES_VERSION value: | major=1 minor=16 gitVersion=v1.16.2 gitCommit=c97fe5036ef3df2967d086711e6c0c405941e14b gitTreeState=clean buildDate=2019-10-15T19:09:08Z goVersion=go1.12.10 compiler=gc platform=linux/amd64 KUBERNETES_SERVICE_DNS_DOMAIN-
Optional. Overrides the default Kubernetes DNS domain name suffix.
By default, services assigned in the Kubernetes cluster have a DNS domain name that uses the default suffix
cluster.local.For example, for broker kafka-0:
<cluster-name>-kafka-0.<cluster-name>-kafka-brokers.<namespace>.svc.cluster.localThe DNS domain name is added to the Kafka broker certificates used for hostname verification.
If you are using a different DNS domain name suffix in your cluster, change the
KUBERNETES_SERVICE_DNS_DOMAINenvironment variable from the default to the one you are using in order to establish a connection with the Kafka brokers.
Configuration by ConfigMap
The Cluster Operator’s logging is configured by the strimzi-cluster-operator ConfigMap.
A ConfigMap containing logging configuration is created when installing the Cluster Operator.
This ConfigMap is described in the file install/cluster-operator/050-ConfigMap-strimzi-cluster-operator.yaml.
You configure Cluster Operator logging by changing the data field log4j2.properties in this ConfigMap.
To update the logging configuration, you can edit the 050-ConfigMap-strimzi-cluster-operator.yaml file and then run the following command:
kubectl apply -f install/cluster-operator/050-ConfigMap-strimzi-cluster-operator.yamlAlternatively, edit the ConfigMap directly:
kubectl edit cm strimzi-cluster-operatorTo change the frequency of the reload interval, set a time in seconds in the monitorInterval option in the created ConfigMap.
If the ConfigMap is missing when the Cluster Operator is deployed, the default logging values are used.
If the ConfigMap is accidentally deleted after the Cluster Operator is deployed, the most recently loaded logging configuration is used.
Create a new ConfigMap to load a new logging configuration.
|
Note
|
Do not remove the monitorInterval option from the ConfigMap. |
Periodic reconciliation
Although the Cluster Operator reacts to all notifications about the desired cluster resources received from the Kubernetes cluster, if the operator is not running, or if a notification is not received for any reason, the desired resources will get out of sync with the state of the running Kubernetes cluster.
In order to handle failovers properly, a periodic reconciliation process is executed by the Cluster Operator so that it can compare the state of the desired resources with the current cluster deployments in order to have a consistent state across all of them.
You can set the time interval for the periodic reconciliations using the STRIMZI_FULL_RECONCILIATION_INTERVAL_MS variable.
5.1.2. Provisioning Role-Based Access Control (RBAC)
For the Cluster Operator to function it needs permission within the Kubernetes cluster to interact with resources such as Kafka, KafkaConnect, and so on, as well as the managed resources, such as ConfigMaps, Pods, Deployments, StatefulSets and Services.
Such permission is described in terms of Kubernetes role-based access control (RBAC) resources:
-
ServiceAccount, -
RoleandClusterRole, -
RoleBindingandClusterRoleBinding.
In addition to running under its own ServiceAccount with a ClusterRoleBinding, the Cluster Operator manages some RBAC resources for the components that need access to Kubernetes resources.
Kubernetes also includes privilege escalation protections that prevent components operating under one ServiceAccount from granting other ServiceAccounts privileges that the granting ServiceAccount does not have.
Because the Cluster Operator must be able to create the ClusterRoleBindings, and RoleBindings needed by resources it manages, the Cluster Operator must also have those same privileges.
Delegated privileges
When the Cluster Operator deploys resources for a desired Kafka resource it also creates ServiceAccounts, RoleBindings, and ClusterRoleBindings, as follows:
-
The Kafka broker pods use a
ServiceAccountcalledcluster-name-kafka-
When the rack feature is used, the
strimzi-cluster-name-kafka-initClusterRoleBindingis used to grant thisServiceAccountaccess to the nodes within the cluster via aClusterRolecalledstrimzi-kafka-broker -
When the rack feature is not used no binding is created
-
-
The ZooKeeper pods use a
ServiceAccountcalledcluster-name-zookeeper -
The Entity Operator pod uses a
ServiceAccountcalledcluster-name-entity-operator-
The Topic Operator produces Kubernetes events with status information, so the
ServiceAccountis bound to aClusterRolecalledstrimzi-entity-operatorwhich grants this access via thestrimzi-entity-operatorRoleBinding
-
-
The pods for
KafkaConnectandKafkaConnectS2Iresources use aServiceAccountcalledcluster-name-cluster-connect -
The pods for
KafkaMirrorMakeruse aServiceAccountcalledcluster-name-mirror-maker -
The pods for
KafkaMirrorMaker2use aServiceAccountcalledcluster-name-mirrormaker2 -
The pods for
KafkaBridgeuse aServiceAccountcalledcluster-name-bridge
ServiceAccount
The Cluster Operator is best run using a ServiceAccount:
Example
ServiceAccount for the Cluster OperatorapiVersion: v1
kind: ServiceAccount
metadata:
name: strimzi-cluster-operator
labels:
app: strimziThe Deployment of the operator then needs to specify this in its spec.template.spec.serviceAccountName:
Partial example of
Deployment for the Cluster OperatorapiVersion: apps/v1
kind: Deployment
metadata:
name: strimzi-cluster-operator
labels:
app: strimzi
spec:
replicas: 1
selector:
matchLabels:
name: strimzi-cluster-operator
strimzi.io/kind: cluster-operator
template:
# ...Note line 12, where the strimzi-cluster-operator ServiceAccount is specified as the serviceAccountName.
ClusterRoles
The Cluster Operator needs to operate using ClusterRoles that gives access to the necessary resources.
Depending on the Kubernetes cluster setup, a cluster administrator might be needed to create the ClusterRoles.
|
Note
|
Cluster administrator rights are only needed for the creation of the ClusterRoles.
The Cluster Operator will not run under the cluster admin account.
|
The ClusterRoles follow the principle of least privilege and contain only those privileges needed by the Cluster Operator to operate Kafka, Kafka Connect, and ZooKeeper clusters. The first set of assigned privileges allow the Cluster Operator to manage Kubernetes resources such as StatefulSets, Deployments, Pods, and ConfigMaps.
Cluster Operator uses ClusterRoles to grant permission at the namespace-scoped resources level and cluster-scoped resources level:
ClusterRole with namespaced resources for the Cluster OperatorapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRole
metadata:
name: strimzi-cluster-operator-namespaced
labels:
app: strimzi
rules:
- apiGroups:
- ""
resources:
# The cluster operator needs to access and manage service accounts to grant Strimzi components cluster permissions
- serviceaccounts
verbs:
- get
- create
- delete
- patch
- update
- apiGroups:
- "rbac.authorization.k8s.io"
resources:
# The cluster operator needs to access and manage rolebindings to grant Strimzi components cluster permissions
- rolebindings
verbs:
- get
- create
- delete
- patch
- update
- apiGroups:
- ""
resources:
# The cluster operator needs to access and manage config maps for Strimzi components configuration
- configmaps
# The cluster operator needs to access and manage services to expose Strimzi components to network traffic
- services
# The cluster operator needs to access and manage secrets to handle credentials
- secrets
# The cluster operator needs to access and manage persistent volume claims to bind them to Strimzi components for persistent data
- persistentvolumeclaims
verbs:
- get
- list
- watch
- create
- delete
- patch
- update
- apiGroups:
- "kafka.strimzi.io"
resources:
# The cluster operator runs the KafkaAssemblyOperator, which needs to access and manage Kafka resources
- kafkas
- kafkas/status
# The cluster operator runs the KafkaConnectAssemblyOperator, which needs to access and manage KafkaConnect resources
- kafkaconnects
- kafkaconnects/status
# The cluster operator runs the KafkaConnectS2IAssemblyOperator, which needs to access and manage KafkaConnectS2I resources
- kafkaconnects2is
- kafkaconnects2is/status
# The cluster operator runs the KafkaConnectorAssemblyOperator, which needs to access and manage KafkaConnector resources
- kafkaconnectors
- kafkaconnectors/status
# The cluster operator runs the KafkaMirrorMakerAssemblyOperator, which needs to access and manage KafkaMirrorMaker resources
- kafkamirrormakers
- kafkamirrormakers/status
# The cluster operator runs the KafkaBridgeAssemblyOperator, which needs to access and manage BridgeMaker resources
- kafkabridges
- kafkabridges/status
# The cluster operator runs the KafkaMirrorMaker2AssemblyOperator, which needs to access and manage KafkaMirrorMaker2 resources
- kafkamirrormaker2s
- kafkamirrormaker2s/status
# The cluster operator runs the KafkaRebalanceAssemblyOperator, which needs to access and manage KafkaRebalance resources
- kafkarebalances
- kafkarebalances/status
verbs:
- get
- list
- watch
- create
- delete
- patch
- update
- apiGroups:
- ""
resources:
# The cluster operator needs to access and delete pods, this is to allow it to monitor pod health and coordinate rolling updates
- pods
verbs:
- get
- list
- watch
- delete
- apiGroups:
- ""
resources:
- endpoints
verbs:
- get
- list
- watch
- apiGroups:
# The cluster operator needs the extensions api as the operator supports Kubernetes version 1.11+
# apps/v1 was introduced in Kubernetes 1.14
- "extensions"
resources:
# The cluster operator needs to access and manage deployments to run deployment based Strimzi components
- deployments
- deployments/scale
# The cluster operator needs to access replica sets to manage Strimzi components and to determine error states
- replicasets
# The cluster operator needs to access and manage replication controllers to manage replicasets
- replicationcontrollers
# The cluster operator needs to access and manage network policies to lock down communication between Strimzi components
- networkpolicies
# The cluster operator needs to access and manage ingresses which allow external access to the services in a cluster
- ingresses
verbs:
- get
- list
- watch
- create
- delete
- patch
- update
- apiGroups:
- "apps"
resources:
# The cluster operator needs to access and manage deployments to run deployment based Strimzi components
- deployments
- deployments/scale
- deployments/status
# The cluster operator needs to access and manage stateful sets to run stateful sets based Strimzi components
- statefulsets
# The cluster operator needs to access replica-sets to manage Strimzi components and to determine error states
- replicasets
verbs:
- get
- list
- watch
- create
- delete
- patch
- update
- apiGroups:
- ""
resources:
# The cluster operator needs to be able to create events and delegate permissions to do so
- events
verbs:
- create
- apiGroups:
# OpenShift S2I requirements
- apps.openshift.io
resources:
- deploymentconfigs
- deploymentconfigs/scale
- deploymentconfigs/status
- deploymentconfigs/finalizers
verbs:
- get
- list
- watch
- create
- delete
- patch
- update
- apiGroups:
# OpenShift S2I requirements
- build.openshift.io
resources:
- buildconfigs
- builds
verbs:
- create
- delete
- get
- list
- patch
- watch
- update
- apiGroups:
# OpenShift S2I requirements
- image.openshift.io
resources:
- imagestreams
- imagestreams/status
verbs:
- create
- delete
- get
- list
- watch
- patch
- update
- apiGroups:
- networking.k8s.io
resources:
# The cluster operator needs to access and manage network policies to lock down communication between Strimzi components
- networkpolicies
verbs:
- get
- list
- watch
- create
- delete
- patch
- update
- apiGroups:
- route.openshift.io
resources:
# The cluster operator needs to access and manage routes to expose Strimzi components for external access
- routes
- routes/custom-host
verbs:
- get
- list
- create
- delete
- patch
- update
- apiGroups:
- policy
resources:
# The cluster operator needs to access and manage pod disruption budgets this limits the number of concurrent disruptions
# that a Strimzi component experiences, allowing for higher availability
- poddisruptionbudgets
verbs:
- get
- list
- watch
- create
- delete
- patch
- updateThe second includes the permissions needed for cluster-scoped resources.
ClusterRole with cluster-scoped resources for the Cluster OperatorapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRole
metadata:
name: strimzi-cluster-operator-global
labels:
app: strimzi
rules:
- apiGroups:
- "rbac.authorization.k8s.io"
resources:
# The cluster operator needs to create and manage cluster role bindings in the case of an install where a user
# has specified they want their cluster role bindings generated
- clusterrolebindings
verbs:
- get
- create
- delete
- patch
- update
- watch
- apiGroups:
- storage.k8s.io
resources:
# The cluster operator requires "get" permissions to view storage class details
# This is because only a persistent volume of a supported storage class type can be resized
- storageclasses
verbs:
- get
- apiGroups:
- ""
resources:
# The cluster operator requires "list" permissions to view all nodes in a cluster
# The listing is used to determine the node addresses when NodePort access is configured
# These addresses are then exposed in the custom resource states
- nodes
verbs:
- listThe strimzi-kafka-broker ClusterRole represents the access needed by the init container in Kafka pods that is used for the rack feature. As described in the Delegated privileges section, this role is also needed by the Cluster Operator in order to be able to delegate this access.
ClusterRole for the Cluster Operator allowing it to delegate access to Kubernetes nodes to the Kafka broker podsapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRole
metadata:
name: strimzi-kafka-broker
labels:
app: strimzi
rules:
- apiGroups:
- ""
resources:
# The Kafka Brokers require "get" permissions to view the node they are on
# This information is used to generate a Rack ID that is used for High Availability configurations
- nodes
verbs:
- getThe strimzi-topic-operator ClusterRole represents the access needed by the Topic Operator. As described in the Delegated privileges section, this role is also needed by the Cluster Operator in order to be able to delegate this access.
ClusterRole for the Cluster Operator allowing it to delegate access to events to the Topic OperatorapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRole
metadata:
name: strimzi-entity-operator
labels:
app: strimzi
rules:
- apiGroups:
- "kafka.strimzi.io"
resources:
# The entity operator runs the KafkaTopic assembly operator, which needs to access and manage KafkaTopic resources
- kafkatopics
- kafkatopics/status
# The entity operator runs the KafkaUser assembly operator, which needs to access and manage KafkaUser resources
- kafkausers
- kafkausers/status
verbs:
- get
- list
- watch
- create
- patch
- update
- delete
- apiGroups:
- ""
resources:
- events
verbs:
# The entity operator needs to be able to create events
- create
- apiGroups:
- ""
resources:
# The entity operator user-operator needs to access and manage secrets to store generated credentials
- secrets
verbs:
- get
- list
- create
- patch
- update
- deleteThe strimzi-kafka-client ClusterRole represents the access needed by the components based on Kafka clients which use the client rack-awareness.
As described in the Delegated privileges section, this role is also needed by the Cluster Operator in order to be able to delegate this access.
ClusterRole for the Cluster Operator allowing it to delegate access to Kubernetes nodes to the Kafka client based podsapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRole
metadata:
name: strimzi-kafka-client
labels:
app: strimzi
rules:
- apiGroups:
- ""
resources:
# The Kafka clients (Connect, Mirror Maker, etc.) require "get" permissions to view the node they are on
# This information is used to generate a Rack ID (client.rack option) that is used for consuming from the closest
# replicas when enabled
- nodes
verbs:
- getClusterRoleBindings
The operator needs ClusterRoleBindings and RoleBindings which associates its ClusterRole with its ServiceAccount:
ClusterRoleBindings are needed for ClusterRoles containing cluster-scoped resources.
Example
ClusterRoleBinding for the Cluster OperatorapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRoleBinding
metadata:
name: strimzi-cluster-operator
labels:
app: strimzi
subjects:
- kind: ServiceAccount
name: strimzi-cluster-operator
namespace: myproject
roleRef:
kind: ClusterRole
name: strimzi-cluster-operator-global
apiGroup: rbac.authorization.k8s.ioClusterRoleBindings are also needed for the ClusterRoles needed for delegation:
Example
ClusterRoleBinding for the Cluster Operator for the Kafka broker rack-awarnessapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRoleBinding
metadata:
name: strimzi-cluster-operator-kafka-broker-delegation
labels:
app: strimzi
# The Kafka broker cluster role must be bound to the cluster operator service account so that it can delegate the cluster role to the Kafka brokers.
# This must be done to avoid escalating privileges which would be blocked by Kubernetes.
subjects:
- kind: ServiceAccount
name: strimzi-cluster-operator
namespace: myproject
roleRef:
kind: ClusterRole
name: strimzi-kafka-broker
apiGroup: rbac.authorization.k8s.ioand
Example
ClusterRoleBinding for the Cluster Operator for the Kafka client rack-awarnessapiVersion: rbac.authorization.k8s.io/v1
kind: ClusterRoleBinding
metadata:
name: strimzi-cluster-operator-kafka-client-delegation
labels:
app: strimzi
# The Kafka clients cluster role must be bound to the cluster operator service account so that it can delegate the
# cluster role to the Kafka clients using it for consuming from closest replica.
# This must be done to avoid escalating privileges which would be blocked by Kubernetes.
subjects:
- kind: ServiceAccount
name: strimzi-cluster-operator
namespace: myproject
roleRef:
kind: ClusterRole
name: strimzi-kafka-client
apiGroup: rbac.authorization.k8s.ioClusterRoles containing only namespaced resources are bound using RoleBindings only.
apiVersion: rbac.authorization.k8s.io/v1
kind: RoleBinding
metadata:
name: strimzi-cluster-operator
labels:
app: strimzi
subjects:
- kind: ServiceAccount
name: strimzi-cluster-operator
namespace: myproject
roleRef:
kind: ClusterRole
name: strimzi-cluster-operator-namespaced
apiGroup: rbac.authorization.k8s.ioapiVersion: rbac.authorization.k8s.io/v1
kind: RoleBinding
metadata:
name: strimzi-cluster-operator-entity-operator-delegation
labels:
app: strimzi
# The Entity Operator cluster role must be bound to the cluster operator service account so that it can delegate the cluster role to the Entity Operator.
# This must be done to avoid escalating privileges which would be blocked by Kubernetes.
subjects:
- kind: ServiceAccount
name: strimzi-cluster-operator
namespace: myproject
roleRef:
kind: ClusterRole
name: strimzi-entity-operator
apiGroup: rbac.authorization.k8s.io5.2. Using the Topic Operator
When you create, modify or delete a topic using the KafkaTopic resource,
the Topic Operator ensures those changes are reflected in the Kafka cluster.
The Deploying Strimzi guide provides instructions to deploy the Topic Operator:
5.2.1. Kafka topic resource
The KafkaTopic resource is used to configure topics, including the number of partitions and replicas.
The full schema for KafkaTopic is described in KafkaTopic schema reference.
Identifying a Kafka cluster for topic handling
A KafkaTopic resource includes a label that defines the appropriate name of the Kafka cluster (derived from the name of the Kafka resource) to which it belongs.
For example:
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaTopic
metadata:
name: topic-name-1
labels:
strimzi.io/cluster: my-clusterThe label is used by the Topic Operator to identify the KafkaTopic resource and create a new topic, and also in subsequent handling of the topic.
If the label does not match the Kafka cluster, the Topic Operator cannot identify the KafkaTopic and the topic is not created.
Handling changes to topics
A fundamental problem that the Topic Operator has to solve is that there is no single source of truth:
Both the KafkaTopic resource and the Kafka topic can be modified independently of the operator.
Complicating this, the Topic Operator might not always be able to observe changes at each end in real time (for example, the operator might be down).
To resolve this, the operator maintains its own private copy of the information about each topic. When a change happens either in the Kafka cluster, or in Kubernetes, it looks at both the state of the other system and at its private copy in order to determine what needs to change to keep everything in sync. The same thing happens whenever the operator starts, and periodically while it is running.
For example, suppose the Topic Operator is not running, and a KafkaTopic my-topic gets created.
When the operator starts it will lack a private copy of "my-topic", so it can infer that the KafkaTopic has been created since it was last running.
The operator will create the topic corresponding to my-topic, and also store a private copy of the metadata for my-topic.
The private copy allows the operator to cope with scenarios where the topic configuration gets changed both in Kafka and in Kubernetes, so long as the changes are not incompatible (for example, both changing the same topic config key, but to different values).
In the case of incompatible changes, the Kafka configuration wins, and the KafkaTopic will be updated to reflect that.
The private copy is held in the same ZooKeeper ensemble used by Kafka itself. This mitigates availability concerns, because if ZooKeeper is not running then Kafka itself cannot run, so the operator will be no less available than it would even if it was stateless.
Kafka topic usage recommendations
When working with topics, be consistent.
Always operate on either KafkaTopic resources or topics directly in Kubernetes.
Avoid routinely switching between both methods for a given topic.
Use topic names that reflect the nature of the topic, and remember that names cannot be changed later.
If creating a topic in Kafka, use a name that is a valid Kubernetes resource name,
otherwise the Topic Operator will need to create the corresponding KafkaTopic with a name that conforms to the Kubernetes rules.
|
Note
|
Recommendations for identifiers and names in Kubernetes are outlined in Identifiers and Names in Kubernetes community article. |
Kafka topic naming conventions
Kafka and Kubernetes impose their own validation rules for the naming of topics in Kafka and KafkaTopic.metadata.name respectively.
There are valid names for each which are invalid in the other.
Using the spec.topicName property, it is possible to create a valid topic in Kafka with a name that would be invalid for the Kafka topic in Kubernetes.
The spec.topicName property inherits Kafka naming validation rules:
-
The name must not be longer than 249 characters.
-
Valid characters for Kafka topics are ASCII alphanumerics,
.,_, and-. -
The name cannot be
.or.., though.can be used in a name, such asexampleTopic.or.exampleTopic.
spec.topicName must not be changed.
For example:
apiVersion: {KafkaApiVersion}
kind: KafkaTopic
metadata:
name: topic-name-1
spec:
topicName: topicName-1 (1)
# ...-
Upper case is invalid in Kubernetes.
cannot be changed to:
apiVersion: {KafkaApiVersion}
kind: KafkaTopic
metadata:
name: topic-name-1
spec:
topicName: name-2
# ...|
Note
|
Some Kafka client applications, such as Kafka Streams, can create topics in Kafka programmatically. If those topics have names that are invalid Kubernetes resource names, the Topic Operator gives them valid names based on the Kafka names. Invalid characters are replaced and a hash is appended to the name. |
5.2.2. Configuring a Kafka topic
Use the properties of the KafkaTopic resource to configure a Kafka topic.
You can use kubectl apply to create or modify topics, and kubectl delete to delete existing topics.
For example:
-
kubectl apply -f <topic-config-file> -
kubectl delete KafkaTopic <topic-name>
This procedure shows how to create a topic with 10 partitions and 2 replicas.
Before you start
It is important that you consider the following before making your changes:
-
Kafka does not support making the following changes through the
KafkaTopicresource:-
Changing topic names using
spec.topicName -
Decreasing partition size using
spec.partitions
-
-
You cannot use
spec.replicasto change the number of replicas that were initially specified. -
Increasing
spec.partitionsfor topics with keys will change how records are partitioned, which can be particularly problematic when the topic uses semantic partitioning.
Prerequisites
-
A running Kafka cluster configured with a Kafka broker listener using TLS authentication and encryption.
-
A running Topic Operator (typically deployed with the Entity Operator).
-
For deleting a topic,
delete.topic.enable=true(default) in thespec.kafka.configof theKafkaresource.
Procedure
-
Prepare a file containing the
KafkaTopicto be created.An exampleKafkaTopicapiVersion: kafka.strimzi.io/v1beta1 kind: KafkaTopic metadata: name: orders labels: strimzi.io/cluster: my-cluster spec: partitions: 10 replicas: 2TipWhen modifying a topic, you can get the current version of the resource using kubectl get kafkatopic orders -o yaml. -
Create the
KafkaTopicresource in Kubernetes.kubectl apply -f TOPIC-CONFIG-FILE
5.2.3. Configuring the Topic Operator with resource requests and limits
You can allocate resources, such as CPU and memory, to the Topic Operator and set a limit on the amount of resources it can consume.
Prerequisites
-
The Cluster Operator is running.
Procedure
-
Update the Kafka cluster configuration in an editor, as required:
kubectl edit kafka MY-CLUSTER -
In the
spec.entityOperator.topicOperator.resourcesproperty in theKafkaresource, set the resource requests and limits for the Topic Operator.apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: # Kafka and ZooKeeper sections... entityOperator: topicOperator: resources: requests: cpu: "1" memory: 500Mi limits: cpu: "1" memory: 500Mi -
Apply the new configuration to create or update the resource.
kubectl apply -f KAFKA-CONFIG-FILE
5.3. Using the User Operator
When you create, modify or delete a user using the KafkaUser resource,
the User Operator ensures those changes are reflected in the Kafka cluster.
The Deploying Strimzi guide provides instructions to deploy the User Operator:
For more information about the schema, see KafkaUser schema reference.
Authenticating and authorizing access to Kafka
Use KafkaUser to enable the authentication and authorization mechanisms that a specific client uses to access Kafka.
For more information on using KafkUser to manage users and secure access to Kafka brokers, see Securing access to Kafka brokers.
5.3.1. Configuring the User Operator with resource requests and limits
You can allocate resources, such as CPU and memory, to the User Operator and set a limit on the amount of resources it can consume.
Prerequisites
-
The Cluster Operator is running.
Procedure
-
Update the Kafka cluster configuration in an editor, as required:
kubectl edit kafka MY-CLUSTER -
In the
spec.entityOperator.userOperator.resourcesproperty in theKafkaresource, set the resource requests and limits for the User Operator.apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka spec: # Kafka and ZooKeeper sections... entityOperator: userOperator: resources: requests: cpu: "1" memory: 500Mi limits: cpu: "1" memory: 500MiSave the file and exit the editor. The Cluster Operator applies the changes automatically.
5.4. Monitoring operators using Prometheus metrics
Strimzi operators expose Prometheus metrics. The metrics are automatically enabled and contain information about:
-
Number of reconciliations
-
Number of Custom Resources the operator is processing
-
Duration of reconciliations
-
JVM metrics from the operators
Additionally, we provide an example Grafana dashboard.
For more information about Prometheus, see the Introducing Metrics to Kafka in the Deploying Strimzi guide.
6. Kafka Bridge
This chapter provides an overview of the Strimzi Kafka Bridge and helps you get started using its REST API to interact with Strimzi.
-
To try out the Kafka Bridge in your local environment, see the Kafka Bridge quickstart later in this chapter.
-
For detailed configuration steps, see [assembly-deployment-configuration-kafka-bridge-str].
-
To view the API documentation, see the Kafka Bridge API reference.
6.1. Kafka Bridge overview
You can use the Strimzi Kafka Bridge as an interface to make specific types of HTTP requests to the Kafka cluster.
6.1.1. Kafka Bridge interface
The Kafka Bridge provides a RESTful interface that allows HTTP-based clients to interact with a Kafka cluster. It offers the advantages of a web API connection to Strimzi, without the need for client applications to interpret the Kafka protocol.
The API has two main resources — consumers and topics — that are exposed and made accessible through endpoints to interact with consumers and producers in your Kafka cluster. The resources relate only to the Kafka Bridge, not the consumers and producers connected directly to Kafka.
HTTP requests
The Kafka Bridge supports HTTP requests to a Kafka cluster, with methods to:
-
Send messages to a topic.
-
Retrieve messages from topics.
-
Retrieve a list of partitions for a topic.
-
Create and delete consumers.
-
Subscribe consumers to topics, so that they start receiving messages from those topics.
-
Retrieve a list of topics that a consumer is subscribed to.
-
Unsubscribe consumers from topics.
-
Assign partitions to consumers.
-
Commit a list of consumer offsets.
-
Seek on a partition, so that a consumer starts receiving messages from the first or last offset position, or a given offset position.
The methods provide JSON responses and HTTP response code error handling. Messages can be sent in JSON or binary formats.
Clients can produce and consume messages without the requirement to use the native Kafka protocol.
Additional resources
-
To view the API documentation, including example requests and responses, see the Kafka Bridge API reference.
6.1.2. Supported clients for the Kafka Bridge
You can use the Kafka Bridge to integrate both internal and external HTTP client applications with your Kafka cluster.
- Internal clients
-
Internal clients are container-based HTTP clients running in the same Kubernetes cluster as the Kafka Bridge itself. Internal clients can access the Kafka Bridge on the host and port defined in the
KafkaBridgecustom resource. - External clients
-
External clients are HTTP clients running outside the Kubernetes cluster in which the Kafka Bridge is deployed and running. External clients can access the Kafka Bridge through an OpenShift Route, a loadbalancer service, or using an Ingress.
HTTP internal and external client integration
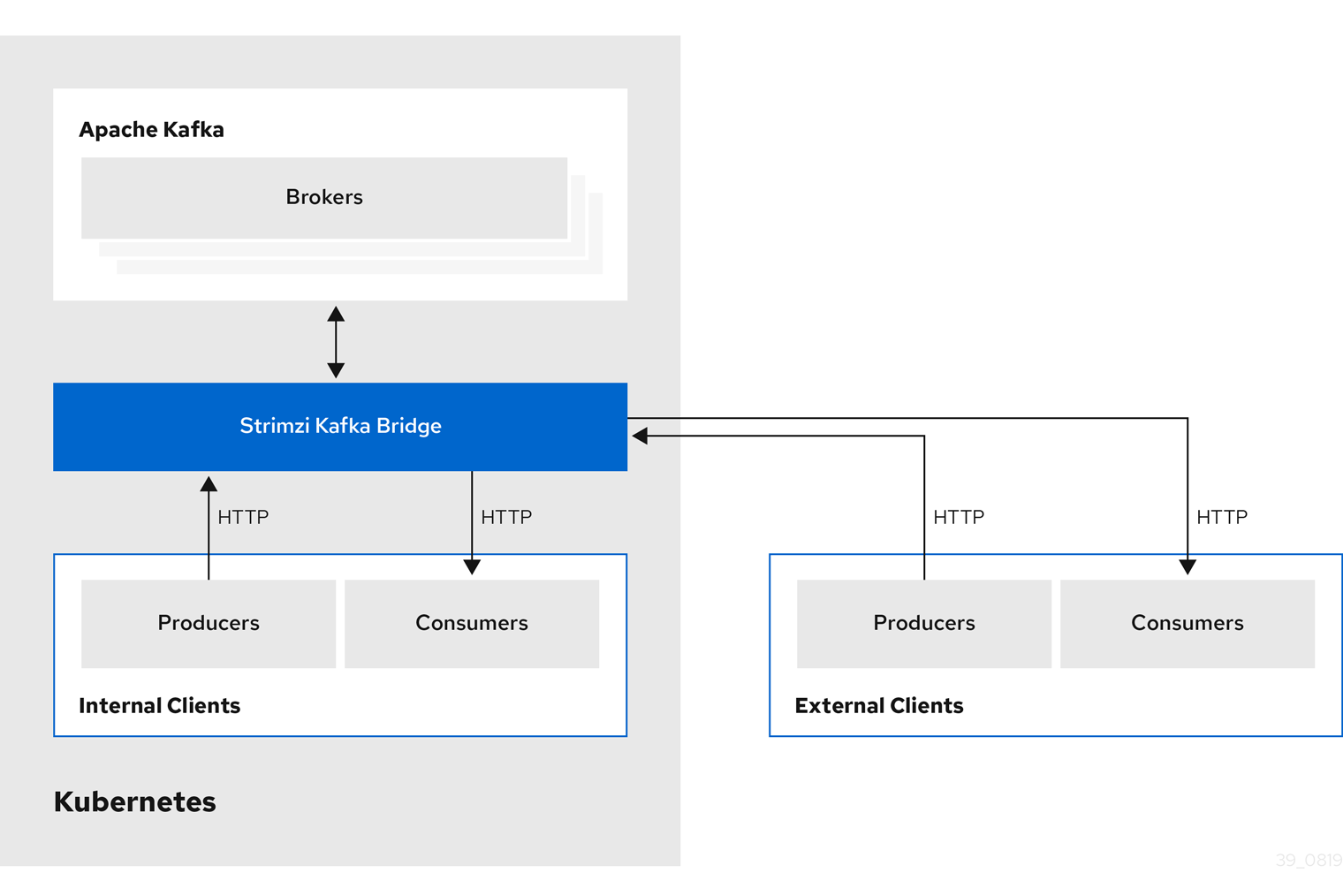
6.1.3. Securing the Kafka Bridge
Strimzi does not currently provide any encryption, authentication, or authorization for the Kafka Bridge. This means that requests sent from external clients to the Kafka Bridge are:
-
Not encrypted, and must use HTTP rather than HTTPS
-
Sent without authentication
However, you can secure the Kafka Bridge using other methods, such as:
-
Kubernetes Network Policies that define which pods can access the Kafka Bridge.
-
Reverse proxies with authentication or authorization, for example, OAuth2 proxies.
-
API Gateways.
-
Ingress or OpenShift Routes with TLS termination.
The Kafka Bridge supports TLS encryption and TLS and SASL authentication when connecting to the Kafka Brokers. Within your Kubernetes cluster, you can configure:
-
TLS or SASL-based authentication between the Kafka Bridge and your Kafka cluster
-
A TLS-encrypted connection between the Kafka Bridge and your Kafka cluster.
For more information, see Configuring the Kafka Bridge.
You can use ACLs in Kafka brokers to restrict the topics that can be consumed and produced using the Kafka Bridge.
6.1.4. Accessing the Kafka Bridge outside of Kubernetes
After deployment, the Strimzi Kafka Bridge can only be accessed by applications running in the same Kubernetes cluster. These applications use the kafka-bridge-name-bridge-service Service to access the API.
If you want to make the Kafka Bridge accessible to applications running outside of the Kubernetes cluster, you can expose it manually by using one of the following features:
-
Services of types LoadBalancer or NodePort
-
Ingress resources
-
OpenShift Routes
If you decide to create Services, use the following labels in the selector to configure the pods to which the service will route the traffic:
# ...
selector:
strimzi.io/cluster: kafka-bridge-name (1)
strimzi.io/kind: KafkaBridge
#...-
Name of the Kafka Bridge custom resource in your Kubernetes cluster.
6.1.5. Requests to the Kafka Bridge
Specify data formats and HTTP headers to ensure valid requests are submitted to the Kafka Bridge.
Content Type headers
API request and response bodies are always encoded as JSON.
-
When performing consumer operations,
POSTrequests must provide the followingContent-Typeheader if there is a non-empty body:Content-Type: application/vnd.kafka.v2+json -
When performing producer operations,
POSTrequests must provideContent-Typeheaders specifying the embedded data format of the messages produced. This can be eitherjsonorbinary.Embedded data format Content-Type header JSON
Content-Type: application/vnd.kafka.json.v2+jsonBinary
Content-Type: application/vnd.kafka.binary.v2+json
The embedded data format is set per consumer, as described in the next section.
The Content-Type must not be set if the POST request has an empty body.
An empty body can be used to create a consumer with the default values.
Embedded data format
The embedded data format is the format of the Kafka messages that are transmitted, over HTTP, from a producer to a consumer using the Kafka Bridge. Two embedded data formats are supported: JSON and binary.
When creating a consumer using the /consumers/groupid endpoint, the POST request body must specify an embedded data format of either JSON or binary. This is specified in the format field, for example:
{
"name": "my-consumer",
"format": "binary", (1)
...
}-
A binary embedded data format.
The embedded data format specified when creating a consumer must match the data format of the Kafka messages it will consume.
If you choose to specify a binary embedded data format, subsequent producer requests must provide the binary data in the request body as Base64-encoded strings. For example, when sending messages using the /topics/topicname endpoint, records.value must be encoded in Base64:
{
"records": [
{
"key": "my-key",
"value": "ZWR3YXJkdGhldGhyZWVsZWdnZWRjYXQ="
},
]
}Producer requests must also provide a Content-Type header that corresponds to the embedded data format, for example, Content-Type: application/vnd.kafka.binary.v2+json.
Message format
When sending messages using the /topics endpoint, you enter the message payload in the request body, in the records parameter.
The records parameter can contain any of these optional fields:
-
Message
headers -
Message
key -
Message
value -
Destination
partition
Example
POST request to /topicscurl -X POST \
http://localhost:8080/topics/my-topic \
-H 'content-type: application/vnd.kafka.json.v2+json' \
-d '{
"records": [
{
"key": "my-key",
"value": "sales-lead-0001"
"partition": 2
"headers": [
{
"key": "key1",
"value": "QXBhY2hlIEthZmthIGlzIHRoZSBib21iIQ==" (1)
}
]
},
]
}'-
The header value in binary format and encoded as Base64.
Accept headers
After creating a consumer, all subsequent GET requests must provide an Accept header in the following format:
Accept: application/vnd.kafka.EMBEDDED-DATA-FORMAT.v2+jsonThe EMBEDDED-DATA-FORMAT is either json or binary.
For example, when retrieving records for a subscribed consumer using an embedded data format of JSON, include this Accept header:
Accept: application/vnd.kafka.json.v2+json6.1.6. CORS
Cross-Origin Resource Sharing (CORS) allows you to specify allowed methods and originating URLs for accessing the Kafka cluster in your Kafka Bridge HTTP configuration.
Example CORS configuration for Kafka Bridge
# ...
cors:
allowedOrigins: "https://strimzi.io"
allowedMethods: "GET,POST,PUT,DELETE,OPTIONS,PATCH"
# ...CORS allows for simple and preflighted requests between origin sources on different domains.
Simple requests are suitable for standard requests using GET, HEAD, POST methods.
A preflighted request sends a HTTP OPTIONS request as an initial check that the actual request is safe to send.
On confirmation, the actual request is sent.
Preflight requests are suitable for methods that require greater safeguards, such as PUT and DELETE,
and use non-standard headers.
All requests require an Origin value in their header, which is the source of the HTTP request.
Simple request
For example, this simple request header specifies the origin as https://strimzi.io.
Origin: https://strimzi.ioThe header information is added to the request.
curl -v -X GET HTTP-ADDRESS/bridge-consumer/records \
-H 'Origin: https://strimzi.io'\
-H 'content-type: application/vnd.kafka.v2+json'In the response from the Kafka Bridge, an Access-Control-Allow-Origin header is returned.
HTTP/1.1 200 OK
Access-Control-Allow-Origin: * (1)-
Returning an asterisk (
*) shows the resource can be accessed by any domain.
Preflighted request
An initial preflight request is sent to Kafka Bridge using an OPTIONS method.
The HTTP OPTIONS request sends header information to check that Kafka Bridge will allow the actual request.
Here the preflight request checks that a POST request is valid from https://strimzi.io.
OPTIONS /my-group/instances/my-user/subscription HTTP/1.1
Origin: https://strimzi.io
Access-Control-Request-Method: POST (1)
Access-Control-Request-Headers: Content-Type (2)-
Kafka Bridge is alerted that the actual request is a
POSTrequest. -
The actual request will be sent with a
Content-Typeheader.
OPTIONS is added to the header information of the preflight request.
curl -v -X OPTIONS -H 'Origin: https://strimzi.io' \
-H 'Access-Control-Request-Method: POST' \
-H 'content-type: application/vnd.kafka.v2+json'Kafka Bridge responds to the initial request to confirm that the request will be accepted. The response header returns allowed origins, methods and headers.
HTTP/1.1 200 OK
Access-Control-Allow-Origin: https://strimzi.io
Access-Control-Allow-Methods: GET,POST,PUT,DELETE,OPTIONS,PATCH
Access-Control-Allow-Headers: content-typeIf the origin or method is rejected, an error message is returned.
The actual request does not require Access-Control-Request-Method header, as it was confirmed in the preflight request,
but it does require the origin header.
curl -v -X POST HTTP-ADDRESS/topics/bridge-topic \
-H 'Origin: https://strimzi.io' \
-H 'content-type: application/vnd.kafka.v2+json'The response shows the originating URL is allowed.
HTTP/1.1 200 OK
Access-Control-Allow-Origin: https://strimzi.ioAdditional resources
Fetch CORS specification
6.1.7. Kafka Bridge API resources
For the full list of REST API endpoints and descriptions, including example requests and responses, see the Kafka Bridge API reference.
6.1.8. Kafka Bridge deployment
You deploy the Kafka Bridge into your Kubernetes cluster by using the Cluster Operator.
After the Kafka Bridge is deployed, the Cluster Operator creates Kafka Bridge objects in your Kubernetes cluster. Objects include the deployment, service, and pod, each named after the name given in the custom resource for the Kafka Bridge.
Additional resources
-
For deployment instructions, see Deploying Kafka Bridge to your Kubernetes cluster in the Deploying Strimzi guide.
-
For detailed information on configuring the Kafka Bridge, see Kafka Bridge cluster configuration
-
For information on configuring the host and port for the
KafkaBridgeresource, see Configuring the Kafka Bridge. -
For information on integrating external clients, see Accessing the Kafka Bridge outside of Kubernetes.
6.2. Kafka Bridge quickstart
Use this quickstart to try out the Strimzi Kafka Bridge in your local development environment. You will learn how to:
-
Deploy the Kafka Bridge to your Kubernetes cluster
-
Expose the Kafka Bridge service to your local machine by using port-forwarding
-
Produce messages to topics and partitions in your Kafka cluster
-
Create a Kafka Bridge consumer
-
Perform basic consumer operations, such as subscribing the consumer to topics and retrieving the messages that you produced
In this quickstart, HTTP requests are formatted as curl commands that you can copy and paste to your terminal. Access to a Kubernetes cluster is required; to run and manage a local Kubernetes cluster, use a tool such as Minikube, CodeReady Containers, or MiniShift.
Ensure you have the prerequisites and then follow the tasks in the order provided in this chapter.
About data formats
In this quickstart, you will produce and consume messages in JSON format, not binary. For more information on the data formats and HTTP headers used in the example requests, see Requests to the Kafka Bridge.
Prerequisites for the quickstart
-
Cluster administrator access to a local or remote Kubernetes cluster.
-
Strimzi is installed.
-
A running Kafka cluster, deployed by the Cluster Operator, in a Kubernetes namespace.
-
The Entity Operator is deployed and running as part of the Kafka cluster.
6.2.1. Deploying the Kafka Bridge to your Kubernetes cluster
Strimzi includes a YAML example that specifies the configuration of the Strimzi Kafka Bridge. Make some minimal changes to this file and then deploy an instance of the Kafka Bridge to your Kubernetes cluster.
Procedure
-
Edit the
examples/bridge/kafka-bridge.yamlfile.apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaBridge metadata: name: quickstart (1) spec: replicas: 1 bootstrapServers: <cluster-name>-kafka-bootstrap:9092 (2) http: port: 8080-
When the Kafka Bridge is deployed,
-bridgeis appended to the name of the deployment and other related resources. In this example, the Kafka Bridge deployment is namedquickstart-bridgeand the accompanying Kafka Bridge service is namedquickstart-bridge-service. -
In the
bootstrapServersproperty, enter the name of the Kafka cluster as the<cluster-name>.
-
-
Deploy the Kafka Bridge to your Kubernetes cluster:
kubectl apply -f examples/bridge/kafka-bridge.yamlA
quickstart-bridgedeployment, service, and other related resources are created in your Kubernetes cluster. -
Verify that the Kafka Bridge was successfully deployed:
kubectl get deploymentsNAME READY UP-TO-DATE AVAILABLE AGE quickstart-bridge 1/1 1 1 34m my-cluster-connect 1/1 1 1 24h my-cluster-entity-operator 1/1 1 1 24h #...
What to do next
After deploying the Kafka Bridge to your Kubernetes cluster, expose the Kafka Bridge service to your local machine.
Additional resources
-
For more detailed information about configuring the Kafka Bridge, see Kafka Bridge cluster configuration.
6.2.2. Exposing the Kafka Bridge service to your local machine
Next, use port forwarding to expose the Strimzi Kafka Bridge service to your local machine on http://localhost:8080.
|
Note
|
Port forwarding is only suitable for development and testing purposes. |
Procedure
-
List the names of the pods in your Kubernetes cluster:
kubectl get pods -o name pod/kafka-consumer # ... pod/quickstart-bridge-589d78784d-9jcnr pod/strimzi-cluster-operator-76bcf9bc76-8dnfm -
Connect to the
quickstart-bridgepod on port8080:kubectl port-forward pod/quickstart-bridge-589d78784d-9jcnr 8080:8080 &NoteIf port 8080 on your local machine is already in use, use an alternative HTTP port, such as 8008.
API requests are now forwarded from port 8080 on your local machine to port 8080 in the Kafka Bridge pod.
6.2.3. Producing messages to topics and partitions
Next, produce messages to topics in JSON format by using the topics endpoint. You can specify destination partitions for messages in the request body, as shown here. The partitions endpoint provides an alternative method for specifying a single destination partition for all messages as a path parameter.
Procedure
-
In a text editor, create a YAML definition for a Kafka topic with three partitions.
apiVersion: kafka.strimzi.io/v1beta1 kind: KafkaTopic metadata: name: bridge-quickstart-topic labels: strimzi.io/cluster: <kafka-cluster-name> (1) spec: partitions: 3 (2) replicas: 1 config: retention.ms: 7200000 segment.bytes: 1073741824-
The name of the Kafka cluster in which the Kafka Bridge is deployed.
-
The number of partitions for the topic.
-
-
Save the file to the
examples/topicdirectory asbridge-quickstart-topic.yaml. -
Create the topic in your Kubernetes cluster:
kubectl apply -f examples/topic/bridge-quickstart-topic.yaml -
Using the Kafka Bridge, produce three messages to the topic you created:
curl -X POST \ http://localhost:8080/topics/bridge-quickstart-topic \ -H 'content-type: application/vnd.kafka.json.v2+json' \ -d '{ "records": [ { "key": "my-key", "value": "sales-lead-0001" }, { "value": "sales-lead-0002", "partition": 2 }, { "value": "sales-lead-0003" } ] }'-
sales-lead-0001is sent to a partition based on the hash of the key. -
sales-lead-0002is sent directly to partition 2. -
sales-lead-0003is sent to a partition in thebridge-quickstart-topictopic using a round-robin method.
-
-
If the request is successful, the Kafka Bridge returns an
offsetsarray, along with a200code and acontent-typeheader ofapplication/vnd.kafka.v2+json. For each message, theoffsetsarray describes:-
The partition that the message was sent to
-
The current message offset of the partition
Example response#... { "offsets":[ { "partition":0, "offset":0 }, { "partition":2, "offset":0 }, { "partition":0, "offset":1 } ] }
-
What to do next
After producing messages to topics and partitions, create a Kafka Bridge consumer.
Additional resources
-
POST /topics/{topicname} in the API reference documentation.
-
POST /topics/{topicname}/partitions/{partitionid} in the API reference documentation.
6.2.4. Creating a Kafka Bridge consumer
Before you can perform any consumer operations in the Kafka cluster, you must first create a consumer by using the consumers endpoint. The consumer is referred to as a Kafka Bridge consumer.
Procedure
-
Create a Kafka Bridge consumer in a new consumer group named
bridge-quickstart-consumer-group:curl -X POST http://localhost:8080/consumers/bridge-quickstart-consumer-group \ -H 'content-type: application/vnd.kafka.v2+json' \ -d '{ "name": "bridge-quickstart-consumer", "auto.offset.reset": "earliest", "format": "json", "enable.auto.commit": false, "fetch.min.bytes": 512, "consumer.request.timeout.ms": 30000 }'-
The consumer is named
bridge-quickstart-consumerand the embedded data format is set asjson. -
Some basic configuration settings are defined.
-
The consumer will not commit offsets to the log automatically because the
enable.auto.commitsetting isfalse. You will commit the offsets manually later in this quickstart.If the request is successful, the Kafka Bridge returns the consumer ID (
instance_id) and base URL (base_uri) in the response body, along with a200code.Example response#... { "instance_id": "bridge-quickstart-consumer", "base_uri":"http://<bridge-name>-bridge-service:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer" }
-
-
Copy the base URL (
base_uri) to use in the other consumer operations in this quickstart.
What to do next
Now that you have created a Kafka Bridge consumer, you can subscribe it to topics.
Additional resources
-
POST /consumers/{groupid} in the API reference documentation.
6.2.5. Subscribing a Kafka Bridge consumer to topics
After you have created a Kafka Bridge consumer, subscribe it to one or more topics by using the subscription endpoint. Once subscribed, the consumer starts receiving all messages that are produced to the topic.
Procedure
-
Subscribe the consumer to the
bridge-quickstart-topictopic that you created earlier, in Producing messages to topics and partitions:curl -X POST http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer/subscription \ -H 'content-type: application/vnd.kafka.v2+json' \ -d '{ "topics": [ "bridge-quickstart-topic" ] }'The
topicsarray can contain a single topic (as shown here) or multiple topics. If you want to subscribe the consumer to multiple topics that match a regular expression, you can use thetopic_patternstring instead of thetopicsarray.If the request is successful, the Kafka Bridge returns a
204(No Content) code only.
What to do next
After subscribing a Kafka Bridge consumer to topics, you can retrieve messages from the consumer.
Additional resources
-
POST /consumers/{groupid}/instances/{name}/subscription in the API reference documentation.
6.2.6. Retrieving the latest messages from a Kafka Bridge consumer
Next, retrieve the latest messages from the Kafka Bridge consumer by requesting data from the records endpoint. In production, HTTP clients can call this endpoint repeatedly (in a loop).
Procedure
-
Produce additional messages to the Kafka Bridge consumer, as described in Producing messages to topics and partitions.
-
Submit a
GETrequest to therecordsendpoint:curl -X GET http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer/records \ -H 'accept: application/vnd.kafka.json.v2+json'After creating and subscribing to a Kafka Bridge consumer, a first GET request will return an empty response because the poll operation starts a rebalancing process to assign partitions.
-
Repeat step two to retrieve messages from the Kafka Bridge consumer.
The Kafka Bridge returns an array of messages — describing the topic name, key, value, partition, and offset — in the response body, along with a
200code. Messages are retrieved from the latest offset by default.HTTP/1.1 200 OK content-type: application/vnd.kafka.json.v2+json #... [ { "topic":"bridge-quickstart-topic", "key":"my-key", "value":"sales-lead-0001", "partition":0, "offset":0 }, { "topic":"bridge-quickstart-topic", "key":null, "value":"sales-lead-0003", "partition":0, "offset":1 }, #...NoteIf an empty response is returned, produce more records to the consumer as described in Producing messages to topics and partitions, and then try retrieving messages again.
What to do next
After retrieving messages from a Kafka Bridge consumer, try committing offsets to the log.
Additional resources
-
GET /consumers/{groupid}/instances/{name}/records in the API reference documentation.
6.2.7. Commiting offsets to the log
Next, use the offsets endpoint to manually commit offsets to the log for all messages received by the Kafka Bridge consumer. This is required because the Kafka Bridge consumer that you created earlier, in Creating a Kafka Bridge consumer, was configured with the enable.auto.commit setting as false.
Procedure
-
Commit offsets to the log for the
bridge-quickstart-consumer:curl -X POST http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer/offsetsBecause no request body is submitted, offsets are committed for all the records that have been received by the consumer. Alternatively, the request body can contain an array (OffsetCommitSeekList) that specifies the topics and partitions that you want to commit offsets for.
If the request is successful, the Kafka Bridge returns a
204code only.
What to do next
After committing offsets to the log, try out the endpoints for seeking to offsets.
Additional resources
-
POST /consumers/{groupid}/instances/{name}/offsets in the API reference documentation.
6.2.8. Seeking to offsets for a partition
Next, use the positions endpoints to configure the Kafka Bridge consumer to retrieve messages for a partition from a specific offset, and then from the latest offset. This is referred to in Apache Kafka as a seek operation.
Procedure
-
Seek to a specific offset for partition 0 of the
quickstart-bridge-topictopic:curl -X POST http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer/positions \ -H 'content-type: application/vnd.kafka.v2+json' \ -d '{ "offsets": [ { "topic": "bridge-quickstart-topic", "partition": 0, "offset": 2 } ] }'If the request is successful, the Kafka Bridge returns a
204code only. -
Submit a
GETrequest to therecordsendpoint:curl -X GET http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer/records \ -H 'accept: application/vnd.kafka.json.v2+json'The Kafka Bridge returns messages from the offset that you seeked to.
-
Restore the default message retrieval behavior by seeking to the last offset for the same partition. This time, use the positions/end endpoint.
curl -X POST http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumer/positions/end \ -H 'content-type: application/vnd.kafka.v2+json' \ -d '{ "partitions": [ { "topic": "bridge-quickstart-topic", "partition": 0 } ] }'If the request is successful, the Kafka Bridge returns another
204code.
|
Note
|
You can also use the positions/beginning endpoint to seek to the first offset for one or more partitions. |
What to do next
In this quickstart, you have used the Strimzi Kafka Bridge to perform several common operations on a Kafka cluster. You can now delete the Kafka Bridge consumer that you created earlier.
Additional resources
-
POST /consumers/{groupid}/instances/{name}/positions in the API reference documentation.
-
POST /consumers/{groupid}/instances/{name}/positions/beginning in the API reference documentation.
-
POST /consumers/{groupid}/instances/{name}/positions/end in the API reference documentation.
6.2.9. Deleting a Kafka Bridge consumer
Finally, delete the Kafa Bridge consumer that you used throughout this quickstart.
Procedure
-
Delete the Kafka Bridge consumer by sending a
DELETErequest to the instances endpoint.curl -X DELETE http://localhost:8080/consumers/bridge-quickstart-consumer-group/instances/bridge-quickstart-consumerIf the request is successful, the Kafka Bridge returns a
204code only.
Additional resources
-
DELETE /consumers/{groupid}/instances/{name} in the API reference documentation.
7. Cruise Control for cluster rebalancing
You can deploy Cruise Control to your Strimzi cluster and use it to rebalance the Kafka cluster.
Cruise Control is an open source system for automating Kafka operations, such as monitoring cluster workload, rebalancing a cluster based on predefined constraints, and detecting and fixing anomalies. It consists of four main components—the Load Monitor, the Analyzer, the Anomaly Detector, and the Executor—and a REST API for client interactions. Strimzi utilizes the REST API to support the following Cruise Control features:
-
Generating optimization proposals from multiple optimization goals.
-
Rebalancing a Kafka cluster based on an optimization proposal.
Other Cruise Control features are not currently supported, including anomaly detection, notifications, write-your-own goals, and changing the topic replication factor.
Example YAML files for Cruise Control are provided in examples/cruise-control/.
7.1. Why use Cruise Control?
Cruise Control reduces the time and effort involved in running an efficient and balanced Kafka cluster.
A typical cluster can become unevenly loaded over time. Partitions that handle large amounts of message traffic might be unevenly distributed across the available brokers. To rebalance the cluster, administrators must monitor the load on brokers and manually reassign busy partitions to brokers with spare capacity.
Cruise Control automates the cluster rebalancing process. It constructs a workload model of resource utilization for the cluster—based on CPU, disk, and network load—and generates optimization proposals (that you can approve or reject) for more balanced partition assignments. A set of configurable optimization goals is used to calculate these proposals.
When you approve an optimization proposal, Cruise Control applies it to your Kafka cluster. When the cluster rebalancing operation is complete, the broker pods are used more effectively and the Kafka cluster is more evenly balanced.
Additional resources
7.2. Optimization goals overview
To rebalance a Kafka cluster, Cruise Control uses optimization goals to generate optimization proposals, which you can approve or reject.
Optimization goals are constraints on workload redistribution and resource utilization across a Kafka cluster. Strimzi supports most of the optimization goals developed in the Cruise Control project. The supported goals, in the default descending order of priority, are as follows:
-
Rack-awareness
-
Replica capacity
-
Capacity: Disk capacity, Network inbound capacity, Network outbound capacity, CPU capacity
-
Replica distribution
-
Potential network output
-
Resource distribution: Disk utilization distribution, Network inbound utilization distribution, Network outbound utilization distribution, CPU utilization distribution
NoteThe resource distribution goals are controlled using capacity limits on broker resources.
-
Leader bytes-in rate distribution
-
Topic replica distribution
-
Leader replica distribution
-
Preferred leader election
For more information on each optimization goal, see Goals in the Cruise Control Wiki.
|
Note
|
Intra-broker disk goals, "Write your own" goals, and Kafka assigner goals are not yet supported. |
Goals configuration in Strimzi custom resources
You configure optimization goals in Kafka and KafkaRebalance custom resources. Cruise Control has configurations for hard optimization goals that must be satisfied, as well as master, default, and user-provided optimization goals.
Optimization goals for resource distribution (disk, network inbound, network outbound, and CPU) are subject to capacity limits on broker resources.
The following sections describe each goal configuration in more detail.
Hard goals and soft goals
Hard goals are goals that must be satisfied in optimization proposals. Goals that are not configured as hard goals are known as soft goals. You can think of soft goals as best effort goals: they do not need to be satisfied in optimization proposals, but are included in optimization calculations. An optimization proposal that violates one or more soft goals, but satisfies all hard goals, is valid.
Cruise Control will calculate optimization proposals that satisfy all the hard goals and as many soft goals as possible (in their priority order). An optimization proposal that does not satisfy all the hard goals is rejected by Cruise Control and not sent to the user for approval.
|
Note
|
For example, you might have a soft goal to distribute a topic’s replicas evenly across the cluster (the topic replica distribution goal). Cruise Control will ignore this goal if doing so enables all the configured hard goals to be met. |
In Cruise Control, the following master optimization goals are preset as hard goals:
RackAwareGoal; ReplicaCapacityGoal; DiskCapacityGoal; NetworkInboundCapacityGoal; NetworkOutboundCapacityGoal; CpuCapacityGoalYou configure hard goals in the Cruise Control deployment configuration, by editing the hard.goals property in Kafka.spec.cruiseControl.config.
-
To inherit the preset hard goals from Cruise Control, do not specify the
hard.goalsproperty inKafka.spec.cruiseControl.config -
To change the preset hard goals, specify the desired goals in the
hard.goalsproperty, using their fully-qualified domain names.
Example
Kafka configuration for hard optimization goalsapiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
topicOperator: {}
userOperator: {}
cruiseControl:
brokerCapacity:
inboundNetwork: 10000KB/s
outboundNetwork: 10000KB/s
config:
hard.goals: >
com.linkedin.kafka.cruisecontrol.analyzer.goals.NetworkInboundCapacityGoal,
com.linkedin.kafka.cruisecontrol.analyzer.goals.NetworkOutboundCapacityGoal
# ...Increasing the number of configured hard goals will reduce the likelihood of Cruise Control generating valid optimization proposals.
If skipHardGoalCheck: true is specified in the KafkaRebalance custom resource, Cruise Control does not check that the list of user-provided optimization goals (in KafkaRebalance.spec.goals) contains all the configured hard goals (hard.goals).
Therefore, if some, but not all, of the user-provided optimization goals are in the hard.goals list, Cruise Control will still treat them as hard goals even if skipHardGoalCheck: true is specified.
Master optimization goals
The master optimization goals are available to all users. Goals that are not listed in the master optimization goals are not available for use in Cruise Control operations.
Unless you change the Cruise Control deployment configuration, Strimzi will inherit the following master optimization goals from Cruise Control, in descending priority order:
RackAwareGoal; ReplicaCapacityGoal; DiskCapacityGoal; NetworkInboundCapacityGoal; NetworkOutboundCapacityGoal; CpuCapacityGoal; ReplicaDistributionGoal; PotentialNwOutGoal; DiskUsageDistributionGoal; NetworkInboundUsageDistributionGoal; NetworkOutboundUsageDistributionGoal; CpuUsageDistributionGoal; TopicReplicaDistributionGoal; LeaderReplicaDistributionGoal; LeaderBytesInDistributionGoal; PreferredLeaderElectionGoalSix of these goals are preset as hard goals.
To reduce complexity, we recommend that you use the inherited master optimization goals, unless you need to completely exclude one or more goals from use in KafkaRebalance resources. The priority order of the master optimization goals can be modified, if desired, in the configuration for default optimization goals.
You configure master optimization goals, if necessary, in the Cruise Control deployment configuration: Kafka.spec.cruiseControl.config.goals
-
To accept the inherited master optimization goals, do not specify the
goalsproperty inKafka.spec.cruiseControl.config. -
If you need to modify the inherited master optimization goals, specify a list of goals, in descending priority order, in the
goalsconfiguration option.
|
Note
|
If you change the inherited master optimization goals, you must ensure that the hard goals, if configured in the hard.goals property in Kafka.spec.cruiseControl.config, are a subset of the master optimization goals that you configured. Otherwise, errors will occur when generating optimization proposals.
|
Default optimization goals
Cruise Control uses the default optimization goals to generate the cached optimization proposal. For more information about the cached optimization proposal, see Optimization proposals overview.
You can override the default optimization goals by setting user-provided optimization goals in a KafkaRebalance custom resource.
Unless you specify default.goals in the Cruise Control deployment configuration, the master optimization goals are used as the default optimization goals.
In this case, the cached optimization proposal is generated using the master optimization goals.
-
To use the master optimization goals as the default goals, do not specify the
default.goalsproperty inKafka.spec.cruiseControl.config. -
To modify the default optimization goals, edit the
default.goalsproperty inKafka.spec.cruiseControl.config. You must use a subset of the master optimization goals.
Example
Kafka configuration for default optimization goalsapiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
zookeeper:
# ...
entityOperator:
topicOperator: {}
userOperator: {}
cruiseControl:
brokerCapacity:
inboundNetwork: 10000KB/s
outboundNetwork: 10000KB/s
config:
default.goals: >
com.linkedin.kafka.cruisecontrol.analyzer.goals.RackAwareGoal,
com.linkedin.kafka.cruisecontrol.analyzer.goals.ReplicaCapacityGoal,
com.linkedin.kafka.cruisecontrol.analyzer.goals.DiskCapacityGoal
# ...If no default optimization goals are specified, the cached proposal is generated using the master optimization goals.
User-provided optimization goals
User-provided optimization goals narrow down the configured default goals for a particular optimization proposal.
You can set them, as required, in spec.goals in a KafkaRebalance custom resource:
KafkaRebalance.spec.goals
User-provided optimization goals can generate optimization proposals for different scenarios.
For example, you might want to optimize leader replica distribution across the Kafka cluster without considering disk capacity or disk utilization.
So, you create a KafkaRebalance custom resource containing a single user-provided goal for leader replica distribution.
User-provided optimization goals must:
-
Include all configured hard goals, or an error occurs
-
Be a subset of the master optimization goals
To ignore the configured hard goals when generating an optimization proposal, add the skipHardGoalCheck: true property to the KafkaRebalance custom resource. See Generating optimization proposals.
Additional resources
-
Configurations in the Cruise Control Wiki.
7.3. Optimization proposals overview
An optimization proposal is a summary of proposed changes that would produce a more balanced Kafka cluster, with partition workloads distributed more evenly among the brokers. Each optimization proposal is based on the set of optimization goals that was used to generate it, subject to any configured capacity limits on broker resources.
An optimization proposal is contained in the Status.Optimization Result property of a KafkaRebalance custom resource.
The information provided is a summary of the full optimization proposal.
Use the summary to decide whether to:
-
Approve the optimization proposal. This instructs Cruise Control to apply the proposal to the Kafka cluster and start a cluster rebalance operation.
-
Reject the optimization proposal. You can change the optimization goals and then generate another proposal.
All optimization proposals are dry runs: you cannot approve a cluster rebalance without first generating an optimization proposal. There is no limit to the number of optimization proposals that can be generated.
Cached optimization proposal
Cruise Control maintains a cached optimization proposal based on the configured default optimization goals. Generated from the workload model, the cached optimization proposal is updated every 15 minutes to reflect the current state of the Kafka cluster. If you generate an optimization proposal using the default optimization goals, Cruise Control returns the most recent cached proposal.
To change the cached optimization proposal refresh interval, edit the proposal.expiration.ms setting in the Cruise Control deployment configuration.
Consider a shorter interval for fast changing clusters, although this increases the load on the Cruise Control server.
Contents of optimization proposals
The following table describes the properties contained in an optimization proposal:
| JSON property | Description |
|---|---|
|
The total number of partition replicas that will be transferred between the disks of the cluster’s brokers. Performance impact during rebalance operation: Relatively high, but lower than |
|
Not yet supported. An empty list is returned. |
|
The number of partition replicas that will be moved between separate brokers. Performance impact during rebalance operation: Relatively high. |
|
A measurement of the overall balancedness of a Kafka Cluster, before and after the optimization proposal was generated. The score is calculated by subtracting the sum of the The |
|
The sum of the size of each partition replica that will be moved between disks on the same broker (see also Performance impact during rebalance operation: Variable. The larger the number, the longer the cluster rebalance will take to complete. Moving a large amount of data between disks on the same broker has less impact than between separate brokers (see |
|
The number of metrics windows upon which the optimization proposal is based. |
|
The sum of the size of each partition replica that will be moved to a separate broker (see also Performance impact during rebalance operation: Variable. The larger the number, the longer the cluster rebalance will take to complete. |
|
The percentage of partitions in the Kafka cluster covered by the optimization proposal. Affected by the number of |
|
If you specified a regular expression in the |
|
The number of partitions whose leaders will be switched to different replicas. This involves a change to ZooKeeper configuration. Performance impact during rebalance operation: Relatively low. |
|
Not yet supported. An empty list is returned. |
7.4. Rebalance performance tuning overview
You can adjust several performance tuning options for cluster rebalances. These options control how partition replica and leadership movements in a rebalance are executed, as well as the bandwidth that is allocated to a rebalance operation.
Partition reassignment commands
Optimization proposals are comprised of separate partition reassignment commands. When you approve a proposal, the Cruise Control server applies these commands to the Kafka cluster.
A partition reassignment command consists of either of the following types of operations:
-
Partition movement: Involves transferring the partition replica and its data to a new location. Partition movements can take one of two forms:
-
Inter-broker movement: The partition replica is moved to a log directory on a different broker.
-
Intra-broker movement: The partition replica is moved to a different log directory on the same broker.
-
-
Leadership movement: This involves switching the leader of the partition’s replicas.
Cruise Control issues partition reassignment commands to the Kafka cluster in batches. The performance of the cluster during the rebalance is affected by the number of each type of movement contained in each batch.
Replica movement strategies
Cluster rebalance performance is also influenced by the replica movement strategy that is applied to the batches of partition reassignment commands.
By default, Cruise Control uses the BaseReplicaMovementStrategy, which simply applies the commands in the order they were generated.
However, if there are some very large partition reassignments early in the proposal, this strategy can slow down the application of the other reassignments.
Cruise Control provides three alternative replica movement strategies that can be applied to optimization proposals:
-
PrioritizeSmallReplicaMovementStrategy: Order reassignments in order of ascending size. -
PrioritizeLargeReplicaMovementStrategy: Order reassignments in order of descending size. -
PostponeUrpReplicaMovementStrategy: Prioritize reassignments for replicas of partitions which have no out-of-sync replicas.
These strategies can be configured as a sequence. The first strategy attempts to compare two partition reassignments using its internal logic. If the reassignments are equivalent, then it passes them to the next strategy in the sequence to decide the order, and so on.
Rebalance tuning options
Cruise Control provides several configuration options for tuning the rebalance parameters discussed above. You can set these tuning options at either the Cruise Control server or optimization proposal levels:
-
The Cruise Control server setting can be set in the Kafka custom resource under
Kafka.spec.cruiseControl.config. -
The individual rebalance performance configurations can be set under
KafkaRebalance.spec.
The relevant configurations are summarized below:
Server and KafkaRebalance Configuration |
Description | Default Value |
|---|---|---|
|
The maximum number of inter-broker partition movements in each partition reassignment batch |
5 |
|
||
|
The maximum number of intra-broker partition movements in each partition reassignment batch |
2 |
|
||
|
The maximum number of partition leadership changes in each partition reassignment batch |
1000 |
|
||
|
The bandwidth (in bytes per second) to be assigned to the reassigning of partitions |
No Limit |
|
||
|
The list of strategies (in priority order) used to determine the order in which partition reassignment commands are executed for generated proposals. For the server setting, use a comma separated string with the fully qualified names of the strategy class (add |
|
|
Changing the default settings affects the length of time that the rebalance takes to complete, as well as the load placed on the Kafka cluster during the rebalance. Using lower values reduces the load but increases the amount of time taken, and vice versa.
Additional resources
7.5. Cruise Control configuration
The config property in Kafka.spec.cruiseControl contains configuration options as keys with values as one of the following JSON types:
-
String
-
Number
-
Boolean
|
Note
|
Strings that look like JSON or YAML will need to be explicitly quoted. |
You can specify and configure all the options listed in the "Configurations" section of the Cruise Control documentation, apart from those managed directly by Strimzi. Specifically, you cannot modify configuration options with keys equal to or starting with one of the keys mentioned here.
If restricted options are specified, they are ignored and a warning message is printed to the Cluster Operator log file. All the supported options are passed to Cruise Control.
An example Cruise Control configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
# ...
cruiseControl:
# ...
config:
default.goals: >
com.linkedin.kafka.cruisecontrol.analyzer.goals.RackAwareGoal,
com.linkedin.kafka.cruisecontrol.analyzer.goals.ReplicaCapacityGoal
cpu.balance.threshold: 1.1
metadata.max.age.ms: 300000
send.buffer.bytes: 131072
# ...Capacity configuration
Cruise Control uses capacity limits to determine if optimization goals for resource distribution are being broken. There are four goals of this type:
-
DiskUsageDistributionGoal- Disk utilization distribution -
CpuUsageDistributionGoal- CPU utilization distribution -
NetworkInboundUsageDistributionGoal- Network inbound utilization distribution -
NetworkOutboundUsageDistributionGoal- Network outbound utilization distribution
You specify capacity limits for Kafka broker resources in the brokerCapacity property in Kafka.spec.cruiseControl .
They are enabled by default and you can change their default values.
Capacity limits can be set for the following broker resources, using the standard Kubernetes byte units (K, M, G and T) or their bibyte (power of two) equivalents (Ki, Mi, Gi and Ti):
-
disk- Disk storage per broker (Default: 100000Mi) -
cpuUtilization- CPU utilization as a percentage (Default: 100) -
inboundNetwork- Inbound network throughput in byte units per second (Default: 10000KiB/s) -
outboundNetwork- Outbound network throughput in byte units per second (Default: 10000KiB/s)
Because Strimzi Kafka brokers are homogeneous, Cruise Control applies the same capacity limits to every broker it is monitoring.
An example Cruise Control brokerCapacity configuration using bibyte units
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
# ...
cruiseControl:
# ...
brokerCapacity:
disk: 100Gi
cpuUtilization: 100
inboundNetwork: 10000KiB/s
outboundNetwork: 10000KiB/s
# ...Additional resources
For more information, refer to the BrokerCapacity schema reference.
Logging configuration
Cruise Control has its own configurable logger:
-
cruisecontrol.root.logger
Cruise Control uses the Apache log4j logger implementation.
Use the logging property to configure loggers and logger levels.
You can set the log levels by specifying the logger and level directly (inline) or use a custom (external) ConfigMap.
If a ConfigMap is used, you set logging.name property to the name of the ConfigMap containing the external logging configuration. Inside the ConfigMap, the logging configuration is described using log4j.properties.
Here we see examples of inline and external logging.
Inline logging
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
# ...
spec:
cruiseControl:
# ...
logging:
type: inline
loggers:
cruisecontrol.root.logger: "INFO"
# ...External logging
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
# ...
spec:
cruiseControl:
# ...
logging:
type: external
name: customConfigMap
# ...7.6. Deploying Cruise Control
To deploy Cruise Control to your Strimzi cluster, define the configuration using the cruiseControl property in the Kafka resource, and then create or update the resource.
Deploy one instance of Cruise Control per Kafka cluster.
Prerequisites
-
A Kubernetes cluster
-
A running Cluster Operator
Procedure
-
Edit the
Kafkaresource and add thecruiseControlproperty.The properties you can configure are shown in this example configuration:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: # ... cruiseControl: brokerCapacity: (1) inboundNetwork: 10000KB/s outboundNetwork: 10000KB/s # ... config: (2) default.goals: > com.linkedin.kafka.cruisecontrol.analyzer.goals.RackAwareGoal, com.linkedin.kafka.cruisecontrol.analyzer.goals.ReplicaCapacityGoal # ... cpu.balance.threshold: 1.1 metadata.max.age.ms: 300000 send.buffer.bytes: 131072 # ... resources: (3) requests: cpu: 200m memory: 64Mi limits: cpu: 500m memory: 128Mi logging: (4) type: inline loggers: cruisecontrol.root.logger: "INFO" template: (5) pod: metadata: labels: label1: value1 securityContext: runAsUser: 1000001 fsGroup: 0 terminationGracePeriodSeconds: 120 readinessProbe: (6) initialDelaySeconds: 15 timeoutSeconds: 5 livenessProbe: (7) initialDelaySeconds: 15 timeoutSeconds: 5 # ...-
Specifies capacity limits for broker resources. For more information, see Capacity configuration.
-
Defines the Cruise Control configuration, including the default optimization goals (in
default.goals) and any customizations to the master optimization goals (ingoals) or the hard goals (inhard.goals). You can provide any standard Cruise Control configuration option apart from those managed directly by Strimzi. For more information on configuring optimization goals, see Optimization goals overview. -
CPU and memory resources reserved for Cruise Control. For more information, see CPU and memory resources.
-
Defined loggers and log levels added directly (inline) or indirectly (external) through a ConfigMap. A custom ConfigMap must be placed under the log4j.properties key. Cruise Control has a single logger named
cruisecontrol.root.logger. You can set the log level to INFO, ERROR, WARN, TRACE, DEBUG, FATAL or OFF. For more information, see Logging configuration.
-
-
Create or update the resource:
kubectl apply -f kafka.yaml -
Verify that Cruise Control was successfully deployed:
kubectl get deployments -l app.kubernetes.io/name=strimzi
Auto-created topics
The following table shows the three topics that are automatically created when Cruise Control is deployed. These topics are required for Cruise Control to work properly and must not be deleted or changed.
| Auto-created topic | Created by | Function |
|---|---|---|
|
Strimzi Metrics Reporter |
Stores the raw metrics from the Metrics Reporter in each Kafka broker. |
|
Cruise Control |
Stores the derived metrics for each partition. These are created by the Metric Sample Aggregator. |
|
Cruise Control |
Stores the metrics samples used to create the Cluster Workload Model. |
To prevent the removal of records that are needed by Cruise Control, log compaction is disabled in the auto-created topics.
What to do next
After configuring and deploying Cruise Control, you can generate optimization proposals.
Additional resources
7.7. Generating optimization proposals
When you create or update a KafkaRebalance resource, Cruise Control generates an optimization proposal for the Kafka cluster based on the configured optimization goals.
Analyze the information in the optimization proposal and decide whether to approve it.
Prerequisites
-
You have deployed Cruise Control to your Strimzi cluster.
-
You have configured optimization goals and, optionally, capacity limits on broker resources.
Procedure
-
Create a
KafkaRebalanceresource:-
To use the default optimization goals defined in the
Kafkaresource, leave thespecproperty empty:apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaRebalance metadata: name: my-rebalance labels: strimzi.io/cluster: my-cluster spec: {} -
To configure user-provided optimization goals instead of using the default goals, add the
goalsproperty and enter one or more goals.In the following example, rack awareness and replica capacity are configured as user-provided optimization goals:
apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaRebalance metadata: name: my-rebalance labels: strimzi.io/cluster: my-cluster spec: goals: - RackAwareGoal - ReplicaCapacityGoal -
To ignore the configured hard goals, add the
skipHardGoalCheck: trueproperty:apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaRebalance metadata: name: my-rebalance labels: strimzi.io/cluster: my-cluster spec: goals: - RackAwareGoal - ReplicaCapacityGoal skipHardGoalCheck: true
-
-
Create or update the resource:
kubectl apply -f your-fileThe Cluster Operator requests the optimization proposal from Cruise Control. This might take a few minutes depending on the size of the Kafka cluster.
-
Check the status of the
KafkaRebalanceresource:kubectl describe kafkarebalance rebalance-cr-nameCruise Control returns one of two statuses:
-
PendingProposal: The rebalance operator is polling the Cruise Control API to check if the optimization proposal is ready. -
ProposalReady: The optimization proposal is ready for review and, if desired, approval. The optimization proposal is contained in theStatus.Optimization Resultproperty of theKafkaRebalanceresource.
-
-
Review the optimization proposal.
kubectl describe kafkarebalance rebalance-cr-nameHere is an example proposal:
Status: Conditions: Last Transition Time: 2020-05-19T13:50:12.533Z Status: ProposalReady Type: State Observed Generation: 1 Optimization Result: Data To Move MB: 0 Excluded Brokers For Leadership: Excluded Brokers For Replica Move: Excluded Topics: Intra Broker Data To Move MB: 0 Monitored Partitions Percentage: 100 Num Intra Broker Replica Movements: 0 Num Leader Movements: 0 Num Replica Movements: 26 On Demand Balancedness Score After: 81.8666802863978 On Demand Balancedness Score Before: 78.01176356230222 Recent Windows: 1 Session Id: 05539377-ca7b-45ef-b359-e13564f1458cThe properties in the
Optimization Resultsection describe the pending cluster rebalance operation. For descriptions of each property, see Contents of optimization proposals.
What to do next
Additional resources
7.8. Approving an optimization proposal
You can approve an optimization proposal generated by Cruise Control, if its status is ProposalReady.
Cruise Control will then apply the optimization proposal to the Kafka cluster, reassigning partitions to brokers and changing partition leadership.
|
Caution
|
This is not a dry run. Before you approve an optimization proposal, you must:
|
Prerequisites
-
You have generated an optimization proposal from Cruise Control.
-
The
KafkaRebalancecustom resource status isProposalReady.
Procedure
Perform these steps for the optimization proposal that you want to approve:
-
Unless the optimization proposal is newly generated, check that it is based on current information about the state of the Kafka cluster. To do so, refresh the optimization proposal to make sure it uses the latest cluster metrics:
-
Annotate the
KafkaRebalanceresource in Kubernetes withrefresh:kubectl annotate kafkarebalance rebalance-cr-name strimzi.io/rebalance=refresh -
Check the status of the
KafkaRebalanceresource:kubectl describe kafkarebalance rebalance-cr-name -
Wait until the status changes to
ProposalReady.
-
-
Approve the optimization proposal that you want Cruise Control to apply.
Annotate the
KafkaRebalanceresource in Kubernetes:kubectl annotate kafkarebalance rebalance-cr-name strimzi.io/rebalance=approve -
The Cluster Operator detects the annotated resource and instructs Cruise Control to rebalance the Kafka cluster.
-
Check the status of the
KafkaRebalanceresource:kubectl describe kafkarebalance rebalance-cr-name -
Cruise Control returns one of three statuses:
-
Rebalancing: The cluster rebalance operation is in progress.
-
Ready: The cluster rebalancing operation completed successfully. The
KafkaRebalancecustom resource cannot be reused. -
NotReady: An error occurred—see Fixing problems with a
KafkaRebalanceresource.
-
Additional resources
7.9. Stopping a cluster rebalance
Once started, a cluster rebalance operation might take some time to complete and affect the overall performance of the Kafka cluster.
If you want to stop a cluster rebalance operation that is in progress, apply the stop annotation to the KafkaRebalance custom resource.
This instructs Cruise Control to finish the current batch of partition reassignments and then stop the rebalance.
When the rebalance has stopped, completed partition reassignments have already been applied; therefore, the state of the Kafka cluster is different when compared to prior to the start of the rebalance operation.
If further rebalancing is required, you should generate a new optimization proposal.
|
Note
|
The performance of the Kafka cluster in the intermediate (stopped) state might be worse than in the initial state. |
Prerequisites
-
You have approved the optimization proposal by annotating the
KafkaRebalancecustom resource withapprove. -
The status of the
KafkaRebalancecustom resource isRebalancing.
Procedure
-
Annotate the
KafkaRebalanceresource in Kubernetes:kubectl annotate kafkarebalance rebalance-cr-name strimzi.io/rebalance=stop -
Check the status of the
KafkaRebalanceresource:kubectl describe kafkarebalance rebalance-cr-name -
Wait until the status changes to
Stopped.
Additional resources
7.10. Fixing problems with a KafkaRebalance resource
If an issue occurs when creating a KafkaRebalance resource or interacting with Cruise Control, the error is reported in the resource status, along with details of how to fix it.
The resource also moves to the NotReady state.
To continue with the cluster rebalance operation, you must fix the problem in the KafkaRebalance resource itself or with the overall Cruise Control deployment.
Problems might include the following:
-
A misconfigured parameter in the
KafkaRebalanceresource. -
The
strimzi.io/clusterlabel for specifying the Kafka cluster in theKafkaRebalanceresource is missing. -
The Cruise Control server is not deployed as the
cruiseControlproperty in theKafkaresource is missing. -
The Cruise Control server is not reachable.
After fixing the issue, you need to add the refresh annotation to the KafkaRebalance resource.
During a “refresh”, a new optimization proposal is requested from the Cruise Control server.
Prerequisites
-
You have approved an optimization proposal.
-
The status of the
KafkaRebalancecustom resource for the rebalance operation isNotReady.
Procedure
-
Get information about the error from the
KafkaRebalancestatus:kubectl describe kafkarebalance rebalance-cr-name -
Attempt to resolve the issue in the
KafkaRebalanceresource. -
Annotate the
KafkaRebalanceresource in Kubernetes:kubectl annotate kafkarebalance rebalance-cr-name strimzi.io/rebalance=refresh -
Check the status of the
KafkaRebalanceresource:kubectl describe kafkarebalance rebalance-cr-name -
Wait until the status changes to
PendingProposal, or directly toProposalReady.
Additional resources
8. Distributed tracing
Distributed tracing allows you to track the progress of transactions between applications in a distributed system. In a microservices architecture, tracing tracks the progress of transactions between services. Trace data is useful for monitoring application performance and investigating issues with target systems and end-user applications.
In Strimzi, tracing facilitates the end-to-end tracking of messages: from source systems to Kafka, and then from Kafka to target systems and applications. It complements the metrics that are available to view in Grafana dashboards, as well as the component loggers.
How Strimzi supports tracing
Support for tracing is built in to the following components:
-
Kafka Connect (including Kafka Connect with Source2Image support)
-
MirrorMaker
-
MirrorMaker 2.0
-
Strimzi Kafka Bridge
You enable and configure tracing for these components using template configuration properties in their custom resources.
To enable tracing in Kafka producers, consumers, and Kafka Streams API applications, you instrument application code using the OpenTracing Apache Kafka Client Instrumentation library (included with Strimzi). When instrumented, clients generate trace data; for example, when producing messages or writing offsets to the log.
Traces are sampled according to a sampling strategy and then visualized in the Jaeger user interface.
|
Note
|
Tracing is not supported for Kafka brokers. Setting up tracing for applications and systems beyond Strimzi is outside the scope of this chapter. To learn more about this subject, search for "inject and extract" in the OpenTracing documentation. |
Outline of procedures
To set up tracing for Strimzi, follow these procedures in order:
-
Set up tracing for clients:
-
Instrument clients with tracers:
-
Set up tracing for MirrorMaker, Kafka Connect, and the Kafka Bridge
Prerequisites
-
The Jaeger backend components are deployed to your Kubernetes cluster. For deployment instructions, see the Jaeger deployment documentation.
8.1. Overview of OpenTracing and Jaeger
Strimzi uses the OpenTracing and Jaeger projects.
OpenTracing is an API specification that is independent from the tracing or monitoring system.
-
The OpenTracing APIs are used to instrument application code
-
Instrumented applications generate traces for individual transactions across the distributed system
-
Traces are composed of spans that define specific units of work over time
Jaeger is a tracing system for microservices-based distributed systems.
-
Jaeger implements the OpenTracing APIs and provides client libraries for instrumentation
-
The Jaeger user interface allows you to query, filter, and analyze trace data

Additional resources
8.2. Setting up tracing for Kafka clients
Initialize a Jaeger tracer to instrument your client applications for distributed tracing.
8.2.1. Initializing a Jaeger tracer for Kafka clients
Configure and initialize a Jaeger tracer using a set of tracing environment variables.
Procedure
In each client application:
-
Add Maven dependencies for Jaeger to the
pom.xmlfile for the client application:<dependency> <groupId>io.jaegertracing</groupId> <artifactId>jaeger-client</artifactId> <version>1.3.2</version> </dependency> -
Define the configuration of the Jaeger tracer using the tracing environment variables.
-
Create the Jaeger tracer from the environment variables that you defined in step two:
Tracer tracer = Configuration.fromEnv().getTracer();NoteFor alternative ways to initialize a Jaeger tracer, see the Java OpenTracing library documentation. -
Register the Jaeger tracer as a global tracer:
GlobalTracer.register(tracer);
A Jaeger tracer is now initialized for the client application to use.
8.2.2. Environment variables for tracing
Use these environment variables when configuring a Jaeger tracer for Kafka clients.
|
Note
|
The tracing environment variables are part of the Jaeger project and are subject to change. For the latest environment variables, see the Jaeger documentation. |
| Property | Required | Description |
|---|---|---|
|
Yes |
The name of the Jaeger tracer service. |
|
No |
The hostname for communicating with the |
|
No |
The port used for communicating with the |
|
No |
The |
|
No |
The authentication token to send to the endpoint as a bearer token. |
|
No |
The username to send to the endpoint if using basic authentication. |
|
No |
The password to send to the endpoint if using basic authentication. |
|
No |
A comma-separated list of formats to use for propagating the trace context. Defaults to the standard Jaeger format. Valid values are |
|
No |
Indicates whether the reporter should also log the spans. |
|
No |
The reporter’s maximum queue size. |
|
No |
The reporter’s flush interval, in ms. Defines how frequently the Jaeger reporter flushes span batches. |
|
No |
The sampling strategy to use for client traces:
To sample all traces, use the Constant sampling strategy with a parameter of 1. For more information, see the Jaeger documentation. |
|
No |
The sampler parameter (number). |
|
No |
The hostname and port to use if a Remote sampling strategy is selected. |
|
No |
A comma-separated list of tracer-level tags that are added to all reported spans. The value can also refer to an environment variable using the format |
Additional resources
8.3. Instrumenting Kafka clients with tracers
Instrument Kafka producer and consumer clients, and Kafka Streams API applications for distributed tracing.
8.3.1. Instrumenting producers and consumers for tracing
Use a Decorator pattern or Interceptors to instrument your Java producer and consumer application code for tracing.
Procedure
In the application code of each producer and consumer application:
-
Add the Maven dependency for OpenTracing to the producer or consumer’s
pom.xmlfile.<dependency> <groupId>io.opentracing.contrib</groupId> <artifactId>opentracing-kafka-client</artifactId> <version>0.1.13</version> </dependency> -
Instrument your client application code using either a Decorator pattern or Interceptors.
-
To use a Decorator pattern:
// Create an instance of the KafkaProducer: KafkaProducer<Integer, String> producer = new KafkaProducer<>(senderProps); // Create an instance of the TracingKafkaProducer: TracingKafkaProducer<Integer, String> tracingProducer = new TracingKafkaProducer<>(producer, tracer); // Send: tracingProducer.send(...); // Create an instance of the KafkaConsumer: KafkaConsumer<Integer, String> consumer = new KafkaConsumer<>(consumerProps); // Create an instance of the TracingKafkaConsumer: TracingKafkaConsumer<Integer, String> tracingConsumer = new TracingKafkaConsumer<>(consumer, tracer); // Subscribe: tracingConsumer.subscribe(Collections.singletonList("messages")); // Get messages: ConsumerRecords<Integer, String> records = tracingConsumer.poll(1000); // Retrieve SpanContext from polled record (consumer side): ConsumerRecord<Integer, String> record = ... SpanContext spanContext = TracingKafkaUtils.extractSpanContext(record.headers(), tracer); -
To use Interceptors:
// Register the tracer with GlobalTracer: GlobalTracer.register(tracer); // Add the TracingProducerInterceptor to the sender properties: senderProps.put(ProducerConfig.INTERCEPTOR_CLASSES_CONFIG, TracingProducerInterceptor.class.getName()); // Create an instance of the KafkaProducer: KafkaProducer<Integer, String> producer = new KafkaProducer<>(senderProps); // Send: producer.send(...); // Add the TracingConsumerInterceptor to the consumer properties: consumerProps.put(ConsumerConfig.INTERCEPTOR_CLASSES_CONFIG, TracingConsumerInterceptor.class.getName()); // Create an instance of the KafkaConsumer: KafkaConsumer<Integer, String> consumer = new KafkaConsumer<>(consumerProps); // Subscribe: consumer.subscribe(Collections.singletonList("messages")); // Get messages: ConsumerRecords<Integer, String> records = consumer.poll(1000); // Retrieve the SpanContext from a polled message (consumer side): ConsumerRecord<Integer, String> record = ... SpanContext spanContext = TracingKafkaUtils.extractSpanContext(record.headers(), tracer);
-
Custom span names in a Decorator pattern
A span is a logical unit of work in Jaeger, with an operation name, start time, and duration.
To use a Decorator pattern to instrument your producer and consumer applications, define custom span names by passing a BiFunction object as an additional argument when creating the TracingKafkaProducer and TracingKafkaConsumer objects. The OpenTracing Apache Kafka Client Instrumentation library includes several built-in span names.
Example: Using custom span names to instrument client application code in a Decorator pattern
// Create a BiFunction for the KafkaProducer that operates on (String operationName, ProducerRecord consumerRecord) and returns a String to be used as the name:
BiFunction<String, ProducerRecord, String> producerSpanNameProvider =
(operationName, producerRecord) -> "CUSTOM_PRODUCER_NAME";
// Create an instance of the KafkaProducer:
KafkaProducer<Integer, String> producer = new KafkaProducer<>(senderProps);
// Create an instance of the TracingKafkaProducer
TracingKafkaProducer<Integer, String> tracingProducer = new TracingKafkaProducer<>(producer,
tracer,
producerSpanNameProvider);
// Spans created by the tracingProducer will now have "CUSTOM_PRODUCER_NAME" as the span name.
// Create a BiFunction for the KafkaConsumer that operates on (String operationName, ConsumerRecord consumerRecord) and returns a String to be used as the name:
BiFunction<String, ConsumerRecord, String> consumerSpanNameProvider =
(operationName, consumerRecord) -> operationName.toUpperCase();
// Create an instance of the KafkaConsumer:
KafkaConsumer<Integer, String> consumer = new KafkaConsumer<>(consumerProps);
// Create an instance of the TracingKafkaConsumer, passing in the consumerSpanNameProvider BiFunction:
TracingKafkaConsumer<Integer, String> tracingConsumer = new TracingKafkaConsumer<>(consumer,
tracer,
consumerSpanNameProvider);
// Spans created by the tracingConsumer will have the operation name as the span name, in upper-case.
// "receive" -> "RECEIVE"Built-in span names
When defining custom span names, you can use the following BiFunctions in the ClientSpanNameProvider class. If no spanNameProvider is specified, CONSUMER_OPERATION_NAME and PRODUCER_OPERATION_NAME are used.
| BiFunction | Description |
|---|---|
|
Returns the |
|
Returns a String concatenation of |
|
Returns the name of the topic that the message was sent to or retrieved from in the format |
|
Returns a String concatenation of |
|
Returns the operation name and the topic name: |
|
Returns a String concatenation of |
8.3.2. Instrumenting Kafka Streams applications for tracing
This section describes how to instrument Kafka Streams API applications for distributed tracing.
Procedure
In each Kafka Streams API application:
-
Add the
opentracing-kafka-streamsdependency to the pom.xml file for your Kafka Streams API application:<dependency> <groupId>io.opentracing.contrib</groupId> <artifactId>opentracing-kafka-streams</artifactId> <version>0.1.13</version> </dependency> -
Create an instance of the
TracingKafkaClientSuppliersupplier interface:KafkaClientSupplier supplier = new TracingKafkaClientSupplier(tracer); -
Provide the supplier interface to
KafkaStreams:KafkaStreams streams = new KafkaStreams(builder.build(), new StreamsConfig(config), supplier); streams.start();
8.4. Setting up tracing for MirrorMaker, Kafka Connect, and the Kafka Bridge
Distributed tracing is supported for MirrorMaker, MirrorMaker 2.0, Kafka Connect (including Kafka Connect with Source2Image support), and the Strimzi Kafka Bridge.
Tracing in MirrorMaker and MirrorMaker 2.0
For MirrorMaker and MirrorMaker 2.0, messages are traced from the source cluster to the target cluster. The trace data records messages entering and leaving the MirrorMaker or MirrorMaker 2.0 component.
Tracing in Kafka Connect
Only messages produced and consumed by Kafka Connect itself are traced. To trace messages sent between Kafka Connect and external systems, you must configure tracing in the connectors for those systems. For more information, see Configuring Kafka Connect.
Tracing in the Kafka Bridge
Messages produced and consumed by the Kafka Bridge are traced. Incoming HTTP requests from client applications to send and receive messages through the Kafka Bridge are also traced. To have end-to-end tracing, you must configure tracing in your HTTP clients.
8.4.1. Enabling tracing in MirrorMaker, Kafka Connect, and Kafka Bridge resources
Update the configuration of KafkaMirrorMaker, KafkaMirrorMaker2, KafkaConnect, KafkaConnectS2I, and KafkaBridge custom resources to specify and configure a Jaeger tracer service for each resource. Updating a tracing-enabled resource in your Kubernetes cluster triggers two events:
-
Interceptor classes are updated in the integrated consumers and producers in MirrorMaker, MirrorMaker 2.0, Kafka Connect, or the Strimzi Kafka Bridge.
-
For MirrorMaker, MirrorMaker 2.0, and Kafka Connect, the tracing agent initializes a Jaeger tracer based on the tracing configuration defined in the resource.
-
For the Kafka Bridge, a Jaeger tracer based on the tracing configuration defined in the resource is initialized by the Kafka Bridge itself.
Procedure
Perform these steps for each KafkaMirrorMaker, KafkaMirrorMaker2, KafkaConnect, KafkaConnectS2I, and KafkaBridge resource.
-
In the
spec.templateproperty, configure the Jaeger tracer service. For example:Jaeger tracer configuration for Kafka ConnectapiVersion: kafka.strimzi.io/v1beta1 kind: KafkaConnect metadata: name: my-connect-cluster spec: #... template: connectContainer: (1) env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831" tracing: (2) type: jaeger #...Jaeger tracer configuration for MirrorMakerapiVersion: kafka.strimzi.io/v1beta1 kind: KafkaMirrorMaker metadata: name: my-mirror-maker spec: #... template: mirrorMakerContainer: env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831" tracing: type: jaeger #...Jaeger tracer configuration for MirrorMaker 2.0apiVersion: kafka.strimzi.io/v1alpha1 kind: KafkaMirrorMaker2 metadata: name: my-mm2-cluster spec: #... template: connectContainer: env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831" tracing: type: jaeger #...Jaeger tracer configuration for the Kafka BridgeapiVersion: kafka.strimzi.io/v1beta1 kind: KafkaBridge metadata: name: my-bridge spec: #... template: bridgeContainer: env: - name: JAEGER_SERVICE_NAME value: my-jaeger-service - name: JAEGER_AGENT_HOST value: jaeger-agent-name - name: JAEGER_AGENT_PORT value: "6831" tracing: type: jaeger #...-
Use the tracing environment variables as template configuration properties.
-
Set the
spec.tracing.typeproperty tojaeger.
-
-
Create or update the resource:
kubectl apply -f your-file
Additional resources
9. Managing TLS certificates
Strimzi supports encrypted communication between the Kafka and Strimzi components using the TLS protocol. Communication between Kafka brokers (interbroker communication), between ZooKeeper nodes (internodal communication), and between these and the Strimzi operators is always encrypted. Communication between Kafka clients and Kafka brokers is encrypted according to how the cluster is configured. For the Kafka and Strimzi components, TLS certificates are also used for authentication.
The Cluster Operator automatically sets up and renews TLS certificates to enable encryption and authentication within your cluster. It also sets up other TLS certificates if you want to enable encryption or TLS authentication between Kafka brokers and clients. Certificates provided by users are not renewed.
You can provide your own server certificates, called Kafka listener certificates, for TLS listeners or external listeners which have TLS encryption enabled. For more information, see Kafka listener certificates.
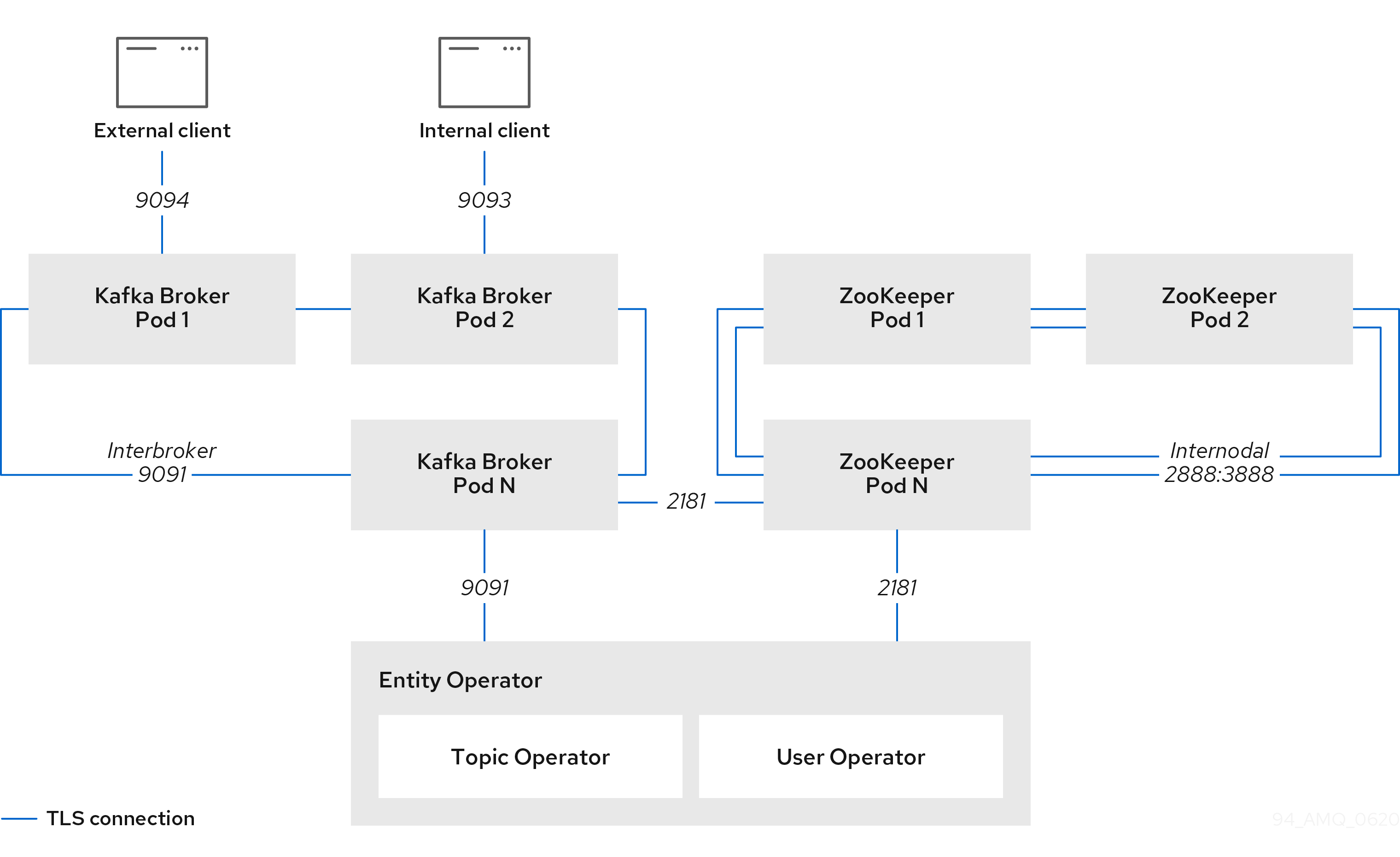
Figure 5. Example architecture of the communication secured by TLS
9.1. Certificate Authorities
To support encryption, each Strimzi component needs its own private keys and public key certificates. All component certificates are signed by an internal Certificate Authority (CA) called the cluster CA.
Similarly, each Kafka client application connecting to Strimzi using TLS client authentication needs to provide private keys and certificates. A second internal CA, named the clients CA, is used to sign certificates for the Kafka clients.
9.1.1. CA certificates
Both the cluster CA and clients CA have a self-signed public key certificate.
Kafka brokers are configured to trust certificates signed by either the cluster CA or clients CA. Components that clients do not need to connect to, such as ZooKeeper, only trust certificates signed by the cluster CA. Unless TLS encryption for external listeners is disabled, client applications must trust certificates signed by the cluster CA. This is also true for client applications that perform mutual TLS authentication.
By default, Strimzi automatically generates and renews CA certificates issued by the cluster CA or clients CA.
You can configure the management of these CA certificates in the Kafka.spec.clusterCa and Kafka.spec.clientsCa objects.
Certificates provided by users are not renewed.
You can provide your own CA certificates for the cluster CA or clients CA. For more information, see Installing your own CA certificates. If you provide your own certificates, you must manually renew them when needed.
9.1.2. Installing your own CA certificates
This procedure describes how to install your own CA certificates and keys instead of using the CA certificates and private keys generated by the Cluster Operator.
You can use this procedure to install your own cluster or client CA certificates.
The procedure describes renewal of CA certificates in PEM format. You can also use certificates in PKCS #12 format.
Prerequisites
-
The Cluster Operator is running.
-
A Kafka cluster is not yet deployed.
-
Your own X.509 certificates and keys in PEM format for the cluster CA or clients CA.
-
If you want to use a cluster or clients CA which is not a Root CA, you have to include the whole chain in the certificate file. The chain should be in the following order:
-
The cluster or clients CA
-
One or more intermediate CAs
-
The root CA
-
-
All CAs in the chain should be configured as a CA in the X509v3 Basic Constraints.
-
Procedure
-
Put your CA certificate in the corresponding
Secret.-
Delete the existing secret:
kubectl delete secret CA-CERTIFICATE-SECRETCA-CERTIFICATE-SECRET is the name of the
Secret, which isCLUSTER-NAME-cluster-ca-certfor the cluster CA certificate andCLUSTER-NAME-clients-ca-certfor the clients CA certificate.Ignore any "Not Exists" errors.
-
Create and label the new secret
kubectl create secret generic CA-CERTIFICATE-SECRET --from-file=ca.crt=CA-CERTIFICATE-FILENAME
-
-
Put your CA key in the corresponding
Secret.-
Delete the existing secret:
kubectl delete secret CA-KEY-SECRETCA-KEY-SECRET is the name of CA key, which is
CLUSTER-NAME-cluster-cafor the cluster CA key andCLUSTER-NAME-clients-cafor the clients CA key. -
Create the new secret:
kubectl create secret generic CA-KEY-SECRET --from-file=ca.key=CA-KEY-SECRET-FILENAME
-
-
Label the secrets with the labels
strimzi.io/kind=Kafkaandstrimzi.io/cluster=CLUSTER-NAME:kubectl label secret CA-CERTIFICATE-SECRET strimzi.io/kind=Kafka strimzi.io/cluster=CLUSTER-NAME kubectl label secret CA-KEY-SECRET strimzi.io/kind=Kafka strimzi.io/cluster=CLUSTER-NAME -
Create the
Kafkaresource for your cluster, configuring either theKafka.spec.clusterCaor theKafka.spec.clientsCaobject to not use generated CAs:Example fragmentKafkaresource configuring the cluster CA to use certificates you supply for yourselfkind: Kafka version: kafka.strimzi.io/v1beta1 spec: # ... clusterCa: generateCertificateAuthority: false
Additional resources
-
To renew CA certificates you have previously installed, see Renewing your own CA certificates.
9.2. Secrets
Strimzi uses Secrets to store private keys and certificates for Kafka cluster components and clients. Secrets are used for establishing TLS encrypted connections between Kafka brokers, and between brokers and clients. They are also used for mutual TLS authentication.
-
A Cluster Secret contains a cluster CA certificate to sign Kafka broker certificates, and is used by a connecting client to establish a TLS encrypted connection with the Kafka cluster to validate broker identity.
-
A Client Secret contains a client CA certificate for a user to sign its own client certificate to allow mutual authentication against the Kafka cluster. The broker validates the client identity through the client CA certificate itself.
-
A User Secret contains a private key and certificate, which are generated and signed by the client CA certificate when a new user is created. The key and certificate are used for authentication and authorization when accessing the cluster.
Secrets provide private keys and certificates in PEM and PKCS #12 formats. Using private keys and certificates in PEM format means that users have to get them from the Secrets, and generate a corresponding truststore (or keystore) to use in their Java applications. PKCS #12 storage provides a truststore (or keystore) that can be used directly.
All keys are 2048 bits in size.
9.2.1. PKCS #12 storage
PKCS #12 defines an archive file format (.p12) for storing cryptography objects into a single file with password protection.
You can use PKCS #12 to manage certificates and keys in one place.
Each Secret contains fields specific to PKCS #12.
-
The
.p12field contains the certificates and keys. -
The
.passwordfield is the password that protects the archive.
9.2.2. Cluster CA Secrets
The following tables describe the Cluster Secrets that are managed by the Cluster Operator in a Kafka cluster.
Only the <cluster>-cluster-ca-cert Secret needs to be used by clients.
All other Secrets described only need to be accessed by the Strimzi components.
You can enforce this using Kubernetes role-based access controls, if necessary.
| Field | Description |
|---|---|
|
The current private key for the cluster CA. |
| Field | Description |
|---|---|
|
PKCS #12 archive file for storing certificates and keys. |
|
Password for protecting the PKCS #12 archive file. |
|
The current certificate for the cluster CA. |
|
Note
|
The CA certificates in <cluster>-cluster-ca-cert must be trusted by Kafka client applications so that they validate the Kafka broker certificates when connecting to Kafka brokers over TLS.
|
| Field | Description |
|---|---|
|
PKCS #12 archive file for storing certificates and keys. |
|
Password for protecting the PKCS #12 archive file. |
|
Certificate for Kafka broker pod <num>. Signed by a current or former cluster CA private key in |
|
Private key for Kafka broker pod |
| Field | Description |
|---|---|
|
PKCS #12 archive file for storing certificates and keys. |
|
Password for protecting the PKCS #12 archive file. |
|
Certificate for ZooKeeper node <num>. Signed by a current or former cluster CA private key in |
|
Private key for ZooKeeper pod |
| Field | Description |
|---|---|
|
PKCS #12 archive file for storing certificates and keys. |
|
Password for protecting the PKCS #12 archive file. |
|
Certificate for TLS communication between the Entity Operator and Kafka or ZooKeeper.
Signed by a current or former cluster CA private key in |
|
Private key for TLS communication between the Entity Operator and Kafka or ZooKeeper. |
9.2.3. Client CA Secrets
| Secret name | Field within Secret | Description |
|---|---|---|
|
|
The current private key for the clients CA. |
|
|
PKCS #12 archive file for storing certificates and keys. |
|
Password for protecting the PKCS #12 archive file. |
|
|
The current certificate for the clients CA. |
The certificates in <cluster>-clients-ca-cert are those which the Kafka brokers trust.
|
Note
|
<cluster>-clients-ca is used to sign certificates of client applications.
It needs to be accessible to the Strimzi components and for administrative access if you are intending to issue application certificates without using the User Operator.
You can enforce this using Kubernetes role-based access controls if necessary.
|
9.2.4. User Secrets
| Secret name | Field within Secret | Description |
|---|---|---|
|
|
PKCS #12 archive file for storing certificates and keys. |
|
Password for protecting the PKCS #12 archive file. |
|
|
Certificate for the user, signed by the clients CA |
|
|
Private key for the user |
9.3. Certificate renewal and validity periods
Cluster CA and clients CA certificates are only valid for a limited time period, known as the validity period. This is usually defined as a number of days since the certificate was generated.
For auto-generated CA certificates, you can configure the validity period of:
-
Cluster CA certificates in
Kafka.spec.clusterCa.validityDays -
Client CA certificates in
Kafka.spec.clientsCa.validityDays
The default validity period for both certificates is 365 days. Manually-installed CA certificates should have their own validity periods defined.
When a CA certificate expires, components and clients that still trust that certificate will not accept TLS connections from peers whose certificates were signed by the CA private key. The components and clients need to trust the new CA certificate instead.
To allow the renewal of CA certificates without a loss of service, the Cluster Operator will initiate certificate renewal before the old CA certificates expire.
You can configure the renewal period of:
-
Cluster CA certificates in
Kafka.spec.clusterCa.renewalDays -
Client CA certificates in
Kafka.spec.clientsCa.renewalDays
The default renewal period for both certificates is 30 days.
The renewal period is measured backwards, from the expiry date of the current certificate.
Validity period against renewal period
Not Before Not After
| |
|<--------------- validityDays --------------->|
<--- renewalDays --->|To make a change to the validity and renewal periods after creating the Kafka cluster, you configure and apply the Kafka custom resource,
and manually renew the CA certificates.
If you do not manually renew the certificates, the new periods will be used the next time the certificate is renewed automatically.
Example Kafka configuration for certificate validity and renewal periods
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
# ...
spec:
# ...
clusterCa:
renewalDays: 30
validityDays: 365
generateCertificateAuthority: true
clientsCa:
renewalDays: 30
validityDays: 365
generateCertificateAuthority: true
# ...The behavior of the Cluster Operator during the renewal period depends on whether the relevant setting is enabled
in either Kafka.spec.clusterCa.generateCertificateAuthority or Kafka.spec.clientsCa.generateCertificateAuthority.
9.3.1. Renewal process with generated CAs
The Cluster Operator performs the following process to renew CA certificates:
-
Generate a new CA certificate, but retain the existing key. The new certificate replaces the old one with the name
ca.crtwithin the correspondingSecret. -
Generate new client certificates (for ZooKeeper nodes, Kafka brokers, and the Entity Operator). This is not strictly necessary because the signing key has not changed, but it keeps the validity period of the client certificate in sync with the CA certificate.
-
Restart ZooKeeper nodes so that they will trust the new CA certificate and use the new client certificates.
-
Restart Kafka brokers so that they will trust the new CA certificate and use the new client certificates.
-
Restart the Topic and User Operators so that they will trust the new CA certificate and use the new client certificates.
9.3.2. Client applications
The Cluster Operator is not aware of the client applications using the Kafka cluster.
When connecting to the cluster, and to ensure they operate correctly, client applications must:
-
Trust the cluster CA certificate published in the <cluster>-cluster-ca-cert Secret.
-
Use the credentials published in their <user-name> Secret to connect to the cluster.
The User Secret provides credentials in PEM and PKCS #12 format, or it can provide a password when using SCRAM-SHA authentication. The User Operator creates the user credentials when a user is created.
For workloads running inside the same Kubernetes cluster and namespace, Secrets can be mounted as a volume so the client Pods construct their keystores and truststores from the current state of the Secrets. For more details on this procedure, see Configuring internal clients to trust the cluster CA.
Client certificate renewal
You must ensure clients continue to work after certificate renewal. The renewal process depends on how the clients are configured.
If you are provisioning client certificates and keys manually, you must generate new client certificates and ensure the new certificates are used by clients within the renewal period. Failure to do this by the end of the renewal period could result in client applications being unable to connect to the cluster.
9.3.3. Renewing CA certificates manually
Cluster and clients CA certificates auto-renew at the start of their respective certificate renewal periods.
If Kafka.spec.clusterCa.generateCertificateAuthority and Kafka.spec.clientsCa.generateCertificateAuthority are set to false,
the CA certificates do not auto-renew.
You can manually renew one or both of these certificates before the certificate renewal period starts. You might do this for security reasons, or if you have changed the renewal or validity periods for the certificates.
A renewed certificate uses the same private key as the old certificate.
Prerequisites
-
The Cluster Operator is running.
-
A Kafka cluster in which CA certificates and private keys are installed.
Procedure
-
Apply the
strimzi.io/force-renewannotation to theSecretthat contains the CA certificate that you want to renew.Table 12. Annotation for the Secret that forces renewal of certificates Certificate Secret Annotate command Cluster CA
KAFKA-CLUSTER-NAME-cluster-ca-cert
kubectl annotate secret KAFKA-CLUSTER-NAME-cluster-ca-cert strimzi.io/force-renew=trueClients CA
KAFKA-CLUSTER-NAME-clients-ca-cert
kubectl annotate secret KAFKA-CLUSTER-NAME-clients-ca-cert strimzi.io/force-renew=trueAt the next reconciliation the Cluster Operator will generate a new CA certificate for the
Secretthat you annotated. If maintenance time windows are configured, the Cluster Operator will generate the new CA certificate at the first reconciliation within the next maintenance time window.Client applications must reload the cluster and clients CA certificates that were renewed by the Cluster Operator.
-
Check the period the CA certificate is valid:
For example, using an
opensslcommand:kubectl get secret CA-CERTIFICATE-SECRET -o 'jsonpath={.data.CA-CERTIFICATE}' | base64 -d | openssl x509 -subject -issuer -startdate -enddate -nooutCA-CERTIFICATE-SECRET is the name of the
Secret, which isKAFKA-CLUSTER-NAME-cluster-ca-certfor the cluster CA certificate andKAFKA-CLUSTER-NAME-clients-ca-certfor the clients CA certificate.CA-CERTIFICATE is the name of the CA certificate, such as
jsonpath={.data.ca\.crt}.The command returns a
notBeforeandnotAfterdate, which is the validity period for the CA certificate.For example, for a cluster CA certificate:
subject=O = io.strimzi, CN = cluster-ca v0 issuer=O = io.strimzi, CN = cluster-ca v0 notBefore=Jun 30 09:43:54 2020 GMT notAfter=Jun 30 09:43:54 2021 GMT -
Delete old certificates from the Secret.
When components are using the new certificates, older certificates might still be active. Delete the old certificates to remove any potential security risk.
Additional resources
9.3.4. Renewing your own CA certificates
This procedure describes how to renew CA certificates and keys that you previously installed. You need to follow this procedure during the renewal period in order to replace CA certificates which will soon expire.
You can use this procedure to install your own cluster or client CA certificates.
The procedure describes renewal of CA certificates in PEM format. You can also use certificates in PKCS #12 format.
Prerequisites
-
The Cluster Operator is running.
-
A Kafka cluster in which you previously installed your own CA certificates and private keys.
-
New cluster and clients X.509 certificates and keys in PEM format.
These could be generated using an openssl command, such as:
openssl req -x509 -new -days NUMBER-OF-DAYS-VALID --nodes -out ca.crt -keyout ca.keyProcedure
-
Check the details of the current CA certificates in the
Secret:kubectl describe secret CA-CERTIFICATE-SECRETCA-CERTIFICATE-SECRET is the name of the
Secret, which isKAFKA-CLUSTER-NAME-cluster-ca-certfor the cluster CA certificate andKAFKA-CLUSTER-NAME-clients-ca-certfor the clients CA certificate. -
Create a directory to contain the existing CA certificates in the secret.
mkdir new-ca-cert-secret cd new-ca-cert-secret -
Fetch the secret for each CA certificate you wish to renew:
kubectl get secret CA-CERTIFICATE-SECRET -o 'jsonpath={.data.CA-CERTIFICATE}' | base64 -d > CA-CERTIFICATEReplace CA-CERTIFICATE with the name of each CA certificate.
-
Rename the old
ca.crtfile asca-DATE.crt, where DATE is the certificate expiry date in the format YEAR-MONTH-DAYTHOUR-MINUTE-SECONDZ.For example
ca-2018-09-27T17-32-00Z.crt.mv ca.crt ca-$(date -u -d$(openssl x509 -enddate -noout -in ca.crt | sed 's/.*=//') +'%Y-%m-%dT%H-%M-%SZ').crt -
Copy your new CA certificate into the directory, naming it
ca.crt:cp PATH-TO-NEW-CERTIFICATE ca.crt -
Put your CA certificate in the corresponding
Secret.-
Delete the existing secret:
kubectl delete secret CA-CERTIFICATE-SECRETCA-CERTIFICATE-SECRET is the name of the
Secret, as returned in the first step.Ignore any "Not Exists" errors.
-
Recreate the secret:
kubectl create secret generic CA-CERTIFICATE-SECRET --from-file=.
-
-
Delete the directory you created:
cd .. rm -r new-ca-cert-secret -
Put your CA key in the corresponding
Secret.-
Delete the existing secret:
kubectl delete secret CA-KEY-SECRETCA-KEY-SECRET is the name of CA key, which is
KAFKA-CLUSTER-NAME-cluster-cafor the cluster CA key andKAFKA-CLUSTER-NAME-clients-cafor the clients CA key. -
Recreate the secret with the new CA key:
kubectl create secret generic CA-KEY-SECRET --from-file=ca.key=CA-KEY-SECRET-FILENAME
-
-
Label the secrets with the labels
strimzi.io/kind=Kafkaandstrimzi.io/cluster=KAFKA-CLUSTER-NAME:kubectl label secret CA-CERTIFICATE-SECRET strimzi.io/kind=Kafka strimzi.io/cluster=KAFKA-CLUSTER-NAME kubectl label secret CA-KEY-SECRET strimzi.io/kind=Kafka strimzi.io/cluster=KAFKA-CLUSTER-NAME
9.4. Replacing private keys
You can replace the private keys used by the cluster CA and clients CA certificates. When a private key is replaced, the Cluster Operator generates a new CA certificate for the new private key.
Prerequisites
-
The Cluster Operator is running.
-
A Kafka cluster in which CA certificates and private keys are installed.
Procedure
-
Apply the
strimzi.io/force-replaceannotation to theSecretthat contains the private key that you want to renew.Table 13. Commands for replacing private keys Private key for Secret Annotate command Cluster CA
<cluster-name>-cluster-ca
kubectl annotate secret <cluster-name>-cluster-ca strimzi.io/force-replace=trueClients CA
<cluster-name>-clients-ca
kubectl annotate secret <cluster-name>-clients-ca strimzi.io/force-replace=true
At the next reconciliation the Cluster Operator will:
-
Generate a new private key for the
Secretthat you annotated -
Generate a new CA certificate
If maintenance time windows are configured, the Cluster Operator will generate the new private key and CA certificate at the first reconciliation within the next maintenance time window.
Client applications must reload the cluster and clients CA certificates that were renewed by the Cluster Operator.
Additional resources
9.5. TLS connections
9.5.1. ZooKeeper communication
Communication between the ZooKeeper nodes on all ports as well as between clients and ZooKeeper is encrypted.
9.5.2. Kafka interbroker communication
Communication between Kafka brokers is done through an internal listener on port 9091, which is encrypted by default and not accessible to Kafka clients.
Communication between Kafka brokers and ZooKeeper nodes is also encrypted.
9.5.3. Topic and User Operators
All Operators use encryption for communication with both Kafka and ZooKeeper. In Topic and User Operators, a TLS sidecar is used when communicating with ZooKeeper.
9.5.4. Cruise Control
Cruise Control uses encryption for communication with both Kafka and ZooKeeper. A TLS sidecar is used when communicating with ZooKeeper.
9.5.5. Kafka Client connections
Encrypted or unencrypted communication between Kafka brokers and clients is configured using the tls property for spec.kafka.listeners.
9.6. Configuring internal clients to trust the cluster CA
This procedure describes how to configure a Kafka client that resides inside the Kubernetes cluster — connecting to a TLS listener — to trust the cluster CA certificate.
The easiest way to achieve this for an internal client is to use a volume mount to access the Secrets containing the necessary certificates and keys.
Follow the steps to configure trust certificates that are signed by the cluster CA for Java-based Kafka Producer, Consumer, and Streams APIs.
Choose the steps to follow according to the certificate format of the cluster CA: PKCS #12 (.p12) or PEM (.crt).
The steps describe how to mount the Cluster Secret that verifies the identity of the Kafka cluster to the client pod.
Prerequisites
-
The Cluster Operator must be running.
-
There needs to be a
Kafkaresource within the Kubernetes cluster. -
You need a Kafka client application inside the Kubernetes cluster that will connect using TLS, and needs to trust the cluster CA certificate.
-
The client application must be running in the same namespace as the
Kafkaresource.
Using PKCS #12 format (.p12)
-
Mount the cluster Secret as a volume when defining the client pod.
For example:
kind: Pod apiVersion: v1 metadata: name: client-pod spec: containers: - name: client-name image: client-name volumeMounts: - name: secret-volume mountPath: /data/p12 env: - name: SECRET_PASSWORD valueFrom: secretKeyRef: name: my-secret key: my-password volumes: - name: secret-volume secret: secretName: my-cluster-cluster-ca-certHere we’re mounting:
-
The PKCS #12 file into an exact path, which can be configured
-
The password into an environment variable, where it can be used for Java configuration
-
-
Configure the Kafka client with the following properties:
-
A security protocol option:
-
security.protocol: SSLwhen using TLS for encryption (with or without TLS authentication). -
security.protocol: SASL_SSLwhen using SCRAM-SHA authentication over TLS.
-
-
ssl.truststore.locationwith the truststore location where the certificates were imported. -
ssl.truststore.passwordwith the password for accessing the truststore. -
ssl.truststore.type=PKCS12to identify the truststore type.
-
Using PEM format (.crt)
-
Mount the cluster Secret as a volume when defining the client pod.
For example:
kind: Pod apiVersion: v1 metadata: name: client-pod spec: containers: - name: client-name image: client-name volumeMounts: - name: secret-volume mountPath: /data/crt volumes: - name: secret-volume secret: secretName: my-cluster-cluster-ca-cert -
Use the certificate with clients that use certificates in X.509 format.
9.7. Configuring external clients to trust the cluster CA
This procedure describes how to configure a Kafka client that resides outside the Kubernetes cluster – connecting to an external listener – to trust the cluster CA certificate.
Follow this procedure when setting up the client and during the renewal period, when the old clients CA certificate is replaced.
Follow the steps to configure trust certificates that are signed by the cluster CA for Java-based Kafka Producer, Consumer, and Streams APIs.
Choose the steps to follow according to the certificate format of the cluster CA: PKCS #12 (.p12) or PEM (.crt).
The steps describe how to obtain the certificate from the Cluster Secret that verifies the identity of the Kafka cluster.
|
Important
|
The <cluster-name>-cluster-ca-cert Secret will contain more than one CA certificate during the CA certificate renewal period.
Clients must add all of them to their truststores.
|
Prerequisites
-
The Cluster Operator must be running.
-
There needs to be a
Kafkaresource within the Kubernetes cluster. -
You need a Kafka client application outside the Kubernetes cluster that will connect using TLS, and needs to trust the cluster CA certificate.
Using PKCS #12 format (.p12)
-
Extract the cluster CA certificate and password from the generated
<cluster-name>-cluster-ca-certSecret.kubectl get secret <cluster-name>-cluster-ca-cert -o jsonpath='{.data.ca\.p12}' | base64 -d > ca.p12kubectl get secret <cluster-name>-cluster-ca-cert -o jsonpath='{.data.ca\.password}' | base64 -d > ca.password -
Configure the Kafka client with the following properties:
-
A security protocol option:
-
security.protocol: SSLwhen using TLS for encryption (with or without TLS authentication). -
security.protocol: SASL_SSLwhen using SCRAM-SHA authentication over TLS.
-
-
ssl.truststore.locationwith the truststore location where the certificates were imported. -
ssl.truststore.passwordwith the password for accessing the truststore. This property can be omitted if it is not needed by the truststore. -
ssl.truststore.type=PKCS12to identify the truststore type.
-
Using PEM format (.crt)
-
Extract the cluster CA certificate from the generated
<cluster-name>-cluster-ca-certSecret.kubectl get secret <cluster-name>-cluster-ca-cert -o jsonpath='{.data.ca\.crt}' | base64 -d > ca.crt -
Use the certificate with clients that use certificates in X.509 format.
9.8. Kafka listener certificates
You can provide your own server certificates and private keys for the following types of listeners:
-
Internal TLS listeners for communication within the Kubernetes cluster
-
External listeners (
route,loadbalancer,ingress, andnodeporttypes), which have TLS encryption enabled, for communication between Kafka clients and Kafka brokers
These user-provided certificates are called Kafka listener certificates.
Providing Kafka listener certificates for external listeners allows you to leverage existing security infrastructure, such as your organization’s private CA or a public CA. Kafka clients will connect to Kafka brokers using Kafka listener certificates rather than certificates signed by the cluster CA or clients CA.
You must manually renew Kafka listener certificates when needed.
9.8.1. Providing your own Kafka listener certificates
This procedure shows how to configure a listener to use your own private key and server certificate, called a Kafka listener certificate.
Your client applications should use the CA public key as a trusted certificate in order to verify the identity of the Kafka broker.
Prerequisites
-
A Kubernetes cluster.
-
The Cluster Operator is running.
-
For each listener, a compatible server certificate signed by an external CA.
-
Provide an X.509 certificate in PEM format.
-
Specify the correct Subject Alternative Names (SANs) for each listener. For more information, see Alternative subjects in server certificates for Kafka listeners.
-
You can provide a certificate that includes the whole CA chain in the certificate file.
-
Procedure
-
Create a
Secretcontaining your private key and server certificate:kubectl create secret generic my-secret --from-file=my-listener-key.key --from-file=my-listener-certificate.crt -
Edit the
Kafkaresource for your cluster. Configure the listener to use yourSecret, certificate file, and private key file in theconfiguration.brokerCertChainAndKeyproperty.Example configuration for aloadbalancerexternal listener with TLS encryption enabled# ... listeners: - name: plain port: 9092 type: internal tls: false - name: external port: 9094 type: loadbalancer tls: true authentication: type: tls configuration: brokerCertChainAndKey: secretName: my-secret certificate: my-listener-certificate.crt key: my-listener-key.key # ...Example configuration for a TLS listener# ... listeners: - name: plain port: 9092 type: internal tls: false - name: tls port: 9093 type: internal tls: true authentication: type: tls configuration: brokerCertChainAndKey: secretName: my-secret certificate: my-listener-certificate.crt key: my-listener-key.key # ... -
Apply the new configuration to create or update the resource:
kubectl apply -f kafka.yamlThe Cluster Operator starts a rolling update of the Kafka cluster, which updates the configuration of the listeners.
NoteA rolling update is also started if you update a Kafka listener certificate in a Secretthat is already used by a TLS or external listener.
9.8.2. Alternative subjects in server certificates for Kafka listeners
In order to use TLS hostname verification with your own Kafka listener certificates, you must use the correct Subject Alternative Names (SANs) for each listener. The certificate SANs must specify hostnames for:
-
All of the Kafka brokers in your cluster
-
The Kafka cluster bootstrap service
You can use wildcard certificates if they are supported by your CA.
TLS listener SAN examples
Use the following examples to help you specify hostnames of the SANs in your certificates for TLS listeners.
Wildcards example
//Kafka brokers
*.<cluster-name>-kafka-brokers
*.<cluster-name>-kafka-brokers.<namespace>.svc
// Bootstrap service
<cluster-name>-kafka-bootstrap
<cluster-name>-kafka-bootstrap.<namespace>.svcNon-wildcards example
// Kafka brokers
<cluster-name>-kafka-0.<cluster-name>-kafka-brokers
<cluster-name>-kafka-0.<cluster-name>-kafka-brokers.<namespace>.svc
<cluster-name>-kafka-1.<cluster-name>-kafka-brokers
<cluster-name>-kafka-1.<cluster-name>-kafka-brokers.<namespace>.svc
# ...
// Bootstrap service
<cluster-name>-kafka-bootstrap
<cluster-name>-kafka-bootstrap.<namespace>.svcExternal listener SAN examples
For external listeners which have TLS encryption enabled, the hostnames you need to specify in certificates depends on the external listener type.
| External listener type | In the SANs, specify… |
|---|---|
|
Addresses of all Kafka broker You can use a matching wildcard name. |
|
Addresses of all Kafka broker You can use a matching wildcard name. |
|
Addresses of all Kubernetes worker nodes that the Kafka broker pods might be scheduled to. You can use a matching wildcard name. |
Additional resources
10. Managing Strimzi
This chapter covers tasks to maintain a deployment of Strimzi.
10.1. Working with custom resources
You can use kubectl commands to retrieve information and perform other operations on Strimzi custom resources.
Using kubectl with the status subresource of a custom resource allows you to get the information about the resource.
10.1.1. Performing kubectl operations on custom resources
Use kubectl commands, such as get, describe, edit, or delete, to perform operations on resource types.
For example, kubectl get kafkatopics retrieves a list of all Kafka topics and kubectl get kafkas retrieves all deployed Kafka clusters.
When referencing resource types, you can use both singular and plural names:
kubectl get kafkas gets the same results as kubectl get kafka.
You can also use the short name of the resource.
Learning short names can save you time when managing Strimzi.
The short name for Kafka is k, so you can also run kubectl get k to list all Kafka clusters.
kubectl get k
NAME DESIRED KAFKA REPLICAS DESIRED ZK REPLICAS
my-cluster 3 3| Strimzi resource | Long name | Short name |
|---|---|---|
Kafka |
kafka |
k |
Kafka Topic |
kafkatopic |
kt |
Kafka User |
kafkauser |
ku |
Kafka Connect |
kafkaconnect |
kc |
Kafka Connect S2I |
kafkaconnects2i |
kcs2i |
Kafka Connector |
kafkaconnector |
kctr |
Kafka Mirror Maker |
kafkamirrormaker |
kmm |
Kafka Mirror Maker 2 |
kafkamirrormaker2 |
kmm2 |
Kafka Bridge |
kafkabridge |
kb |
Kafka Rebalance |
kafkarebalance |
kr |
Resource categories
Categories of custom resources can also be used in kubectl commands.
All Strimzi custom resources belong to the category strimzi, so you can use strimzi to get all the Strimzi resources with one command.
For example, running kubectl get strimzi lists all Strimzi custom resources in a given namespace.
kubectl get strimzi
NAME DESIRED KAFKA REPLICAS DESIRED ZK REPLICAS
kafka.kafka.strimzi.io/my-cluster 3 3
NAME PARTITIONS REPLICATION FACTOR
kafkatopic.kafka.strimzi.io/kafka-apps 3 3
NAME AUTHENTICATION AUTHORIZATION
kafkauser.kafka.strimzi.io/my-user tls simpleThe kubectl get strimzi -o name command returns all resource types and resource names.
The -o name option fetches the output in the type/name format
kubectl get strimzi -o name
kafka.kafka.strimzi.io/my-cluster
kafkatopic.kafka.strimzi.io/kafka-apps
kafkauser.kafka.strimzi.io/my-userYou can combine this strimzi command with other commands.
For example, you can pass it into a kubectl delete command to delete all resources in a single command.
kubectl delete $(kubectl get strimzi -o name)
kafka.kafka.strimzi.io "my-cluster" deleted
kafkatopic.kafka.strimzi.io "kafka-apps" deleted
kafkauser.kafka.strimzi.io "my-user" deletedDeleting all resources in a single operation might be useful, for example, when you are testing new Strimzi features.
Querying the status of sub-resources
There are other values you can pass to the -o option.
For example, by using -o yaml you get the output in YAML format.
Usng -o json will return it as JSON.
You can see all the options in kubectl get --help.
One of the most useful options is the JSONPath support, which allows you to pass JSONPath expressions to query the Kubernetes API. A JSONPath expression can extract or navigate specific parts of any resource.
For example, you can use the JSONPath expression {.status.listeners[?(@.type=="tls")].bootstrapServers}
to get the bootstrap address from the status of the Kafka custom resource and use it in your Kafka clients.
Here, the command finds the bootstrapServers value of the tls listeners.
kubectl get kafka my-cluster -o=jsonpath='{.status.listeners[?(@.type=="tls")].bootstrapServers}{"\n"}'
my-cluster-kafka-bootstrap.myproject.svc:9093By changing the type condition to @.type=="external" or @.type=="plain" you can also get the address of the other Kafka listeners.
kubectl get kafka my-cluster -o=jsonpath='{.status.listeners[?(@.type=="external")].bootstrapServers}{"\n"}'
192.168.1.247:9094You can use jsonpath to extract any other property or group of properties from any custom resource.
10.1.2. Strimzi custom resource status information
Several resources have a status property, as described in the following table.
| Strimzi resource | Schema reference | Publishes status information on… |
|---|---|---|
|
The Kafka cluster. |
|
|
The Kafka Connect cluster, if deployed. |
|
|
The Kafka Connect cluster with Source-to-Image support, if deployed. |
|
|
|
|
|
The Kafka MirrorMaker tool, if deployed. |
|
|
Kafka topics in your Kafka cluster. |
|
|
Kafka users in your Kafka cluster. |
|
|
The Strimzi Kafka Bridge, if deployed. |
The status property of a resource provides information on the resource’s:
-
Current state, in the
status.conditionsproperty -
Last observed generation, in the
status.observedGenerationproperty
The status property also provides resource-specific information. For example:
-
KafkaConnectStatusprovides the REST API endpoint for Kafka Connect connectors. -
KafkaUserStatusprovides the user name of the Kafka user and theSecretin which their credentials are stored. -
KafkaBridgeStatusprovides the HTTP address at which external client applications can access the Bridge service.
A resource’s current state is useful for tracking progress related to the resource achieving its desired state, as defined by the spec property. The status conditions provide the time and reason the state of the resource changed and details of events preventing or delaying the operator from realizing the resource’s desired state.
The last observed generation is the generation of the resource that was last reconciled by the Cluster Operator. If the value of observedGeneration is different from the value of metadata.generation, the operator has not yet processed the latest update to the resource. If these values are the same, the status information reflects the most recent changes to the resource.
Strimzi creates and maintains the status of custom resources, periodically evaluating the current state of the custom resource and updating its status accordingly.
When performing an update on a custom resource using kubectl edit, for example, its status is not editable. Moreover, changing the status would not affect the configuration of the Kafka cluster.
Here we see the status property specified for a Kafka custom resource.
Kafka custom resource with status
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
spec:
# ...
status:
conditions: (1)
- lastTransitionTime: 2019-07-23T23:46:57+0000
status: "True"
type: Ready (2)
observedGeneration: 4 (3)
listeners: (4)
- addresses:
- host: my-cluster-kafka-bootstrap.myproject.svc
port: 9092
type: plain
- addresses:
- host: my-cluster-kafka-bootstrap.myproject.svc
port: 9093
certificates:
- |
-----BEGIN CERTIFICATE-----
...
-----END CERTIFICATE-----
type: tls
- addresses:
- host: 172.29.49.180
port: 9094
certificates:
- |
-----BEGIN CERTIFICATE-----
...
-----END CERTIFICATE-----
type: external
# ...-
Status
conditionsdescribe criteria related to the status that cannot be deduced from the existing resource information, or are specific to the instance of a resource. -
The
Readycondition indicates whether the Cluster Operator currently considers the Kafka cluster able to handle traffic. -
The
observedGenerationindicates the generation of theKafkacustom resource that was last reconciled by the Cluster Operator. -
The
listenersdescribe the current Kafka bootstrap addresses by type.ImportantThe address in the custom resource status for external listeners with type nodeportis currently not supported.
|
Note
|
The Kafka bootstrap addresses listed in the status do not signify that those endpoints or the Kafka cluster is in a ready state. |
Accessing status information
You can access status information for a resource from the command line. For more information, see Finding the status of a custom resource.
10.1.3. Finding the status of a custom resource
This procedure describes how to find the status of a custom resource.
Prerequisites
-
A Kubernetes cluster.
-
The Cluster Operator is running.
Procedure
-
Specify the custom resource and use the
-o jsonpathoption to apply a standard JSONPath expression to select thestatusproperty:kubectl get kafka <kafka_resource_name> -o jsonpath='{.status}'This expression returns all the status information for the specified custom resource. You can use dot notation, such as
status.listenersorstatus.observedGeneration, to fine-tune the status information you wish to see.
Additional resources
-
For more information about using JSONPath, see JSONPath support.
10.2. Discovering services using labels and annotations
Service discovery makes it easier for client applications running in the same Kubernetes cluster as Strimzi to interact with a Kafka cluster.
A service discovery label and annotation is generated for services used to access the Kafka cluster:
-
Internal Kafka bootstrap service
-
HTTP Bridge service
The label helps to make the service discoverable, and the annotation provides connection details that a client application can use to make the connection.
The service discovery label, strimzi.io/discovery, is set as true for the Service resources.
The service discovery annotation has the same key, providing connection details in JSON format for each service.
Example internal Kafka bootstrap service
apiVersion: v1
kind: Service
metadata:
annotations:
strimzi.io/discovery: |-
[ {
"port" : 9092,
"tls" : false,
"protocol" : "kafka",
"auth" : "scram-sha-512"
}, {
"port" : 9093,
"tls" : true,
"protocol" : "kafka",
"auth" : "tls"
} ]
labels:
strimzi.io/cluster: my-cluster
strimzi.io/discovery: "true"
strimzi.io/kind: Kafka
strimzi.io/name: my-cluster-kafka-bootstrap
name: my-cluster-kafka-bootstrap
spec:
#...Example HTTP Bridge service
apiVersion: v1
kind: Service
metadata:
annotations:
strimzi.io/discovery: |-
[ {
"port" : 8080,
"tls" : false,
"auth" : "none",
"protocol" : "http"
} ]
labels:
strimzi.io/cluster: my-bridge
strimzi.io/discovery: "true"
strimzi.io/kind: KafkaBridge
strimzi.io/name: my-bridge-bridge-service10.2.1. Returning connection details on services
You can find the services by specifying the discovery label when fetching services from the command line or a corresponding API call.
kubectl get service -l strimzi.io/discovery=trueThe connection details are returned when retrieving the service discovery label.
10.3. Recovering a cluster from persistent volumes
You can recover a Kafka cluster from persistent volumes (PVs) if they are still present.
You might want to do this, for example, after:
-
A namespace was deleted unintentionally
-
A whole Kubernetes cluster is lost, but the PVs remain in the infrastructure
10.3.1. Recovery from namespace deletion
Recovery from namespace deletion is possible because of the relationship between persistent volumes and namespaces.
A PersistentVolume (PV) is a storage resource that lives outside of a namespace.
A PV is mounted into a Kafka pod using a PersistentVolumeClaim (PVC), which lives inside a namespace.
The reclaim policy for a PV tells a cluster how to act when a namespace is deleted. If the reclaim policy is set as:
-
Delete (default), PVs are deleted when PVCs are deleted within a namespace
-
Retain, PVs are not deleted when a namespace is deleted
To ensure that you can recover from a PV if a namespace is deleted unintentionally, the policy must be reset from Delete to Retain in the PV specification using the persistentVolumeReclaimPolicy property:
apiVersion: v1
kind: PersistentVolume
# ...
spec:
# ...
persistentVolumeReclaimPolicy: RetainAlternatively, PVs can inherit the reclaim policy of an associated storage class. Storage classes are used for dynamic volume allocation.
By configuring the reclaimPolicy property for the storage class, PVs that use the storage class are created with the appropriate reclaim policy.
The storage class is configured for the PV using the storageClassName property.
apiVersion: v1
kind: StorageClass
metadata:
name: gp2-retain
parameters:
# ...
# ...
reclaimPolicy: RetainapiVersion: v1
kind: PersistentVolume
# ...
spec:
# ...
storageClassName: gp2-retain|
Note
|
If you are using Retain as the reclaim policy, but you want to delete an entire cluster, you need to delete the PVs manually. Otherwise they will not be deleted, and may cause unnecessary expenditure on resources. |
10.3.2. Recovery from loss of a Kubernetes cluster
When a cluster is lost, you can use the data from disks/volumes to recover the cluster if they were preserved within the infrastructure. The recovery procedure is the same as with namespace deletion, assuming PVs can be recovered and they were created manually.
10.3.3. Recovering a deleted cluster from persistent volumes
This procedure describes how to recover a deleted cluster from persistent volumes (PVs).
In this situation, the Topic Operator identifies that topics exist in Kafka, but the KafkaTopic resources do not exist.
When you get to the step to recreate your cluster, you have two options:
-
Use Option 1 when you can recover all
KafkaTopicresources.The
KafkaTopicresources must therefore be recovered before the cluster is started so that the corresponding topics are not deleted by the Topic Operator. -
Use Option 2 when you are unable to recover all
KafkaTopicresources.This time you deploy your cluster without the Topic Operator, delete the Topic Operator data in ZooKeeper, and then redeploy it so that the Topic Operator can recreate the
KafkaTopicresources from the corresponding topics.
|
Note
|
If the Topic Operator is not deployed, you only need to recover the PersistentVolumeClaim (PVC) resources.
|
Before you begin
In this procedure, it is essential that PVs are mounted into the correct PVC to avoid data corruption.
A volumeName is specified for the PVC and this must match the name of the PV.
For more information, see:
|
Note
|
The procedure does not include recovery of KafkaUser resources, which must be recreated manually.
If passwords and certificates need to be retained, secrets must be recreated before creating the KafkaUser resources.
|
Procedure
-
Check information on the PVs in the cluster:
kubectl get pvInformation is presented for PVs with data.
Example output showing columns important to this procedure:
NAME RECLAIMPOLICY CLAIM pvc-5e9c5c7f-3317-11ea-a650-06e1eadd9a4c ... Retain ... myproject/data-my-cluster-zookeeper-1 pvc-5e9cc72d-3317-11ea-97b0-0aef8816c7ea ... Retain ... myproject/data-my-cluster-zookeeper-0 pvc-5ead43d1-3317-11ea-97b0-0aef8816c7ea ... Retain ... myproject/data-my-cluster-zookeeper-2 pvc-7e1f67f9-3317-11ea-a650-06e1eadd9a4c ... Retain ... myproject/data-0-my-cluster-kafka-0 pvc-7e21042e-3317-11ea-9786-02deaf9aa87e ... Retain ... myproject/data-0-my-cluster-kafka-1 pvc-7e226978-3317-11ea-97b0-0aef8816c7ea ... Retain ... myproject/data-0-my-cluster-kafka-2-
NAME shows the name of each PV.
-
RECLAIM POLICY shows that PVs are retained.
-
CLAIM shows the link to the original PVCs.
-
-
Recreate the original namespace:
kubectl create namespace myproject -
Recreate the original PVC resource specifications, linking the PVCs to the appropriate PV:
For example:
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: data-0-my-cluster-kafka-0 spec: accessModes: - ReadWriteOnce resources: requests: storage: 100Gi storageClassName: gp2-retain volumeMode: Filesystem volumeName: pvc-7e1f67f9-3317-11ea-a650-06e1eadd9a4c -
Edit the PV specifications to delete the
claimRefproperties that bound the original PVC.For example:
apiVersion: v1 kind: PersistentVolume metadata: annotations: kubernetes.io/createdby: aws-ebs-dynamic-provisioner pv.kubernetes.io/bound-by-controller: "yes" pv.kubernetes.io/provisioned-by: kubernetes.io/aws-ebs creationTimestamp: "<date>" finalizers: - kubernetes.io/pv-protection labels: failure-domain.beta.kubernetes.io/region: eu-west-1 failure-domain.beta.kubernetes.io/zone: eu-west-1c name: pvc-7e226978-3317-11ea-97b0-0aef8816c7ea resourceVersion: "39431" selfLink: /api/v1/persistentvolumes/pvc-7e226978-3317-11ea-97b0-0aef8816c7ea uid: 7efe6b0d-3317-11ea-a650-06e1eadd9a4c spec: accessModes: - ReadWriteOnce awsElasticBlockStore: fsType: xfs volumeID: aws://eu-west-1c/vol-09db3141656d1c258 capacity: storage: 100Gi claimRef: apiVersion: v1 kind: PersistentVolumeClaim name: data-0-my-cluster-kafka-2 namespace: myproject resourceVersion: "39113" uid: 54be1c60-3319-11ea-97b0-0aef8816c7ea nodeAffinity: required: nodeSelectorTerms: - matchExpressions: - key: failure-domain.beta.kubernetes.io/zone operator: In values: - eu-west-1c - key: failure-domain.beta.kubernetes.io/region operator: In values: - eu-west-1 persistentVolumeReclaimPolicy: Retain storageClassName: gp2-retain volumeMode: FilesystemIn the example, the following properties are deleted:
claimRef: apiVersion: v1 kind: PersistentVolumeClaim name: data-0-my-cluster-kafka-2 namespace: myproject resourceVersion: "39113" uid: 54be1c60-3319-11ea-97b0-0aef8816c7ea -
Deploy the Cluster Operator.
kubectl apply -f install/cluster-operator -n my-project -
Recreate your cluster.
Follow the steps depending on whether or not you have all the
KafkaTopicresources needed to recreate your cluster.Option 1: If you have all the
KafkaTopicresources that existed before you lost your cluster, including internal topics such as committed offsets from__consumer_offsets:-
Recreate all
KafkaTopicresources.It is essential that you recreate the resources before deploying the cluster, or the Topic Operator will delete the topics.
-
Deploy the Kafka cluster.
For example:
kubectl apply -f kafka.yaml
Option 2: If you do not have all the
KafkaTopicresources that existed before you lost your cluster:-
Deploy the Kafka cluster, as with the first option, but without the Topic Operator by removing the
topicOperatorproperty from the Kafka resource before deploying.If you include the Topic Operator in the deployment, the Topic Operator will delete all the topics.
-
Run an
execcommand to one of the Kafka broker pods to open the ZooKeeper shell script.For example, where my-cluster-kafka-0 is the name of the broker pod:
kubectl exec -ti my-cluster-zookeeper-0 -- bin/zookeeper-shell.sh localhost:12181 -
Delete the whole
/strimzipath to remove the Topic Operator storage:deleteall /strimzi -
Enable the Topic Operator by redeploying the Kafka cluster with the
topicOperatorproperty to recreate theKafkaTopicresources.For example:
apiVersion: kafka.strimzi.io/v1beta1 kind: Kafka metadata: name: my-cluster spec: #... entityOperator: topicOperator: {} (1) #...
-
Here we show the default configuration, which has no additional properties. You specify the required configuration using the properties described in
EntityTopicOperatorSpecschema reference.
-
-
Verify the recovery by listing the
KafkaTopicresources:kubectl get KafkaTopic
10.4. Tuning client configuration
Use configuration properties to optimize the performance of Kafka producers and consumers.
A minimum set of configuration properties is required, but you can add or adjust properties to change how producers and consumers interact with Kafka. For example, for producers you can tune latency and throughput of messages so that clients can respond to data in real time. Or you can change the configuration to provide stronger message durability guarantees.
You might start by analyzing client metrics to gauge where to make your initial configurations, then make incremental changes and further comparisons until you have the configuration you need.
10.4.1. Kafka producer configuration tuning
Use a basic producer configuration with optional properties that are tailored to specific use cases.
Adjusting your configuration to maximize throughput might increase latency or vice versa. You will need to experiment and tune your producer configuration to get the balance you need.
Basic producer configuration
Connection and serializer properties are required for every producer. Generally, it is good practice to add a client id for tracking, and use compression on the producer to reduce batch sizes in requests.
In a basic producer configuration:
-
The order of messages in a partition is not guaranteed.
-
The acknowledgment of messages reaching the broker does not guarantee durability.
# ...
bootstrap.servers=localhost:9092 (1)
key.serializer=org.apache.kafka.common.serialization.StringSerializer (2)
value.serializer=org.apache.kafka.common.serialization.StringSerializer (3)
client.id=my-client (4)
compression.type=gzip (5)
# ...-
(Required) Tells the producer to connect to a Kafka cluster using a host:port bootstrap server address for a Kafka broker. The producer uses the address to discover and connect to all brokers in the cluster. Use a comma-separated list to specify two or three addresses in case a server is down, but it’s not necessary to provide a list of all the brokers in the cluster.
-
(Required) Serializer to transform the key of each message to bytes prior to them being sent to a broker.
-
(Required) Serializer to transform the value of each message to bytes prior to them being sent to a broker.
-
(Optional) The logical name for the client, which is used in logs and metrics to identify the source of a request.
-
(Optional) The codec for compressing messages, which are sent and might be stored in compressed format and then decompressed when reaching a consumer. Compression is useful for improving throughput and reducing the load on storage, but might not be suitable for low latency applications where the cost of compression or decompression could be prohibitive.
Data durability
You can apply greater data durability, to minimize the likelihood that messages are lost, using message delivery acknowledgments.
# ... acks=all (1) # ...
-
Specifying
acks=allforces a partition leader to replicate messages to a certain number of followers before acknowledging that the message request was successfully received. Because of the additional checks,acks=allincreases the latency between the producer sending a message and receiving acknowledgment.
The number of brokers which need to have appended the messages to their logs before the acknowledgment is sent to the producer is determined by the topic’s min.insync.replicas configuration.
A typical starting point is to have a topic replication factor of 3, with two in-sync replicas on other brokers.
In this configuration, the producer can continue unaffected if a single broker is unavailable.
If a second broker becomes unavailable, the producer won’t receive acknowledgments and won’t be able to produce more messages.
Topic configuration to support
acks=all# ... min.insync.replicas=2 (1) # ...
-
Use
2in-sync replicas. The default is1.
|
Note
|
If the system fails, there is a risk of unsent data in the buffer being lost. |
Ordered delivery
Idempotent producers avoid duplicates as messages are delivered exactly once.
IDs and sequence numbers are assigned to messages to ensure the order of delivery, even in the event of failure.
If you are using acks=all for data consistency, enabling idempotency makes sense for ordered delivery.
Ordered delivery with idempotency
# ... enable.idempotence=true (1) max.in.flight.requests.per.connection=5 (2) acks=all (3) retries=2147483647 (4) # ...
-
Set to
trueto enable the idempotent producer. -
With idempotent delivery the number of in-flight requests may be greater than 1 while still providing the message ordering guarantee. The default is 5 in-flight requests.
-
Set
ackstoall. -
Set the number of attempts to resend a failed message request.
If you are not using acks=all and idempotency because of the performance cost,
set the number of in-flight (unacknowledged) requests to 1 to preserve ordering.
Otherwise, a situation is possible where Message-A fails only to succeed after Message-B was already written to the broker.
Ordered delivery without idempotency
# ... enable.idempotence=false (1) max.in.flight.requests.per.connection=1 (2) retries=2147483647 # ...
-
Set to
falseto disable the idempotent producer. -
Set the number of in-flight requests to exactly
1.
Reliability guarantees
Idempotence is useful for exactly once writes to a single partition. Transactions, when used with idempotence, allow exactly once writes across multiple partitions.
Transactions guarantee that messages using the same transactional ID are produced once, and either all are successfully written to the respective logs or none of them are.
# ...
enable.idempotence=true
max.in.flight.requests.per.connection=5
acks=all
retries=2147483647
transactional.id=UNIQUE-ID (1)
transaction.timeout.ms=900000 (2)
# ...-
Specify a unique transactional ID.
-
Set the maximum allowed time for transactions in milliseconds before a timeout error is returned. The default is
900000or 15 minutes.
The choice of transactional.id is important in order that the transactional guarantee is maintained.
Each transactional id should be used for a unique set of topic partitions.
For example, this can be achieved using an external mapping of topic partition names to transactional ids,
or by computing the transactional id from the topic partition names using a function that avoids collisions.
Optimizing throughput and latency
Usually, the requirement of a system is to satisfy a particular throughput target for a proportion of messages within a given latency. For example, targeting 500,000 messages per second with 95% of messages being acknowledged within 2 seconds.
It’s likely that the messaging semantics (message ordering and durability) of your producer are defined by the requirements for your application.
For instance, it’s possible that you don’t have the option of using acks=0 or acks=1 without breaking some important property or guarantee provided by your application.
Broker restarts have a significant impact on high percentile statistics. For example, over a long period the 99th percentile latency is dominated by behavior around broker restarts. This is worth considering when designing benchmarks or comparing performance numbers from benchmarking with performance numbers seen in production.
Depending on your objective, Kafka offers a number of configuration parameters and techniques for tuning producer performance for throughput and latency.
- Message batching (
linger.msandbatch.size) -
Message batching delays sending messages in the hope that more messages destined for the same broker will be sent, allowing them to be batched into a single produce request. Batching is a compromise between higher latency in return for higher throughput. Time-based batching is configured using
linger.ms, and size-based batching is configured usingbatch.size. - Compression (
compression.type) -
Message compression adds latency in the producer (CPU time spent compressing the messages), but makes requests (and potentially disk writes) smaller, which can increase throughput. Whether compression is worthwhile, and the best compression to use, will depend on the messages being sent. Compression happens on the thread which calls
KafkaProducer.send(), so if the latency of this method matters for your application you should consider using more threads. - Pipelining (
max.in.flight.requests.per.connection) -
Pipelining means sending more requests before the response to a previous request has been received. In general more pipelining means better throughput, up to a threshold at which other effects, such as worse batching, start to counteract the effect on throughput.
Lowering latency
When your application calls KafkaProducer.send() the messages are:
-
Processed by any interceptors
-
Serialized
-
Assigned to a partition
-
Compressed
-
Added to a batch of messages in a per-partition queue
At which point the send() method returns.
So the time send() is blocked is determined by:
-
The time spent in the interceptors, serializers and partitioner
-
The compression algorithm used
-
The time spent waiting for a buffer to use for compression
Batches will remain in the queue until one of the following occurs:
-
The batch is full (according to
batch.size) -
The delay introduced by
linger.mshas passed -
The sender is about to send message batches for other partitions to the same broker, and it is possible to add this batch too
-
The producer is being flushed or closed
Look at the configuration for batching and buffering to mitigate the impact of send() blocking on latency.
# ... linger.ms=100 (1) batch.size=16384 (2) buffer.memory=33554432 (3) # ...
-
The
lingerproperty adds a delay in milliseconds so that larger batches of messages are accumulated and sent in a request. The default is0'. -
If a maximum
batch.sizein bytes is used, a request is sent when the maximum is reached, or messages have been queued for longer thanlinger.ms(whichever comes sooner). Adding the delay allows batches to accumulate messages up to the batch size. -
The buffer size must be at least as big as the batch size, and be able to accommodate buffering, compression and in-flight requests.
Increasing throughput
Improve throughput of your message requests by adjusting the maximum time to wait before a message is delivered and completes a send request.
You can also direct messages to a specified partition by writing a custom partitioner to replace the default.
# ... delivery.timeout.ms=120000 (1) partitioner.class=my-custom-partitioner (2) # ...
-
The maximum time in milliseconds to wait for a complete send request. You can set the value to
MAX_LONGto delegate to Kafka an indefinite number of retries. The default is120000or 2 minutes. -
Specify the class name of the custom partitioner.
10.4.2. Kafka consumer configuration tuning
Use a basic consumer configuration with optional properties that are tailored to specific use cases.
When tuning your consumers your primary concern will be ensuring that they cope efficiently with the amount of data ingested. As with the producer tuning, be prepared to make incremental changes until the consumers operate as expected.
Basic consumer configuration
Connection and deserializer properties are required for every consumer. Generally, it is good practice to add a client id for tracking.
In a consumer configuration, irrespective of any subsequent configuration:
-
The consumer fetches from a given offset and consumes the messages in order, unless the offset is changed to skip or re-read messages.
-
The broker does not know if the consumer processed the responses, even when committing offsets to Kafka, because the offsets might be sent to a different broker in the cluster.
# ...
bootstrap.servers=localhost:9092 (1)
key.deserializer=org.apache.kafka.common.serialization.StringDeserializer (2)
value.deserializer=org.apache.kafka.common.serialization.StringDeserializer (3)
client.id=my-client (4)
group.id=my-group-id (5)
# ...-
(Required) Tells the consumer to connect to a Kafka cluster using a host:port bootstrap server address for a Kafka broker. The consumer uses the address to discover and connect to all brokers in the cluster. Use a comma-separated list to specify two or three addresses in case a server is down, but it is not necessary to provide a list of all the brokers in the cluster. If you are using a loadbalancer service to expose the Kafka cluster, you only need the address for the service because the availability is handled by the loadbalancer.
-
(Required) Deserializer to transform the bytes fetched from the Kafka broker into message keys.
-
(Required) Deserializer to transform the bytes fetched from the Kafka broker into message values.
-
(Optional) The logical name for the client, which is used in logs and metrics to identify the source of a request. The id can also be used to throttle consumers based on processing time quotas.
-
(Conditional) A group id is required for a consumer to be able to join a consumer group.
Consumer groups are used to share a typically large data stream generated by multiple producers from a given topic.
Consumers are grouped using a group.id, allowing messages to be spread across the members.
Scaling data consumption using consumer groups
Consumer groups share a typically large data stream generated by one or multiple producers from a given topic.
Consumers with the same group.id property are in the same group.
One of the consumers in the group is elected leader and decides how the partitions are assigned to the consumers in the group.
Each partition can only be assigned to a single consumer.
If you do not already have as many consumers as partitions,
you can scale data consumption by adding more consumer instances with the same group.id.
Adding more consumers to a group than there are partitions will not help throughput,
but it does mean that there are consumers on standby should one stop functioning.
If you can meet throughput goals with fewer consumers, you save on resources.
Consumers within the same consumer group send offset commits and heartbeats to the same broker. So the greater the number of consumers in the group, the higher the request load on the broker.
# ... group.id=my-group-id (1) # ...
-
Add a consumer to a consumer group using a group id.
Message ordering guarantees
Kafka brokers receive fetch requests from consumers that ask the broker to send messages from a list of topics, partitions and offset positions.
A consumer observes messages in a single partition in the same order that they were committed to the broker, which means that Kafka only provides ordering guarantees for messages in a single partition. Conversely, if a consumer is consuming messages from multiple partitions, the order of messages in different partitions as observed by the consumer does not necessarily reflect the order in which they were sent.
If you want a strict ordering of messages from one topic, use one partition per consumer.
Optimizing throughput and latency
Control the number of messages returned when your client application calls KafkaConsumer.poll().
Use the fetch.max.wait.ms and fetch.min.bytes properties to increase the minimum amount of data fetched by the consumer from the Kafka broker.
Time-based batching is configured using fetch.max.wait.ms, and size-based batching is configured using fetch.min.bytes.
If CPU utilization in the consumer or broker is high, it might be because there are too many requests from the consumer.
You can adjust fetch.max.wait.ms and fetch.min.bytes properties higher so that there are fewer requests and messages are delivered in bigger batches.
By adjusting higher, throughput is improved with some cost to latency.
You can also adjust higher if the amount of data being produced is low.
For example, if you set fetch.max.wait.ms to 500ms and fetch.min.bytes to 16384 bytes,
when Kafka receives a fetch request from the consumer it will respond when the first of either threshold is reached.
Conversely, you can adjust the fetch.max.wait.ms and fetch.min.bytes properties lower to improve end-to-end latency.
# ... fetch.max.wait.ms=500 (1) fetch.min.bytes=16384 (2) # ...
-
The maximum time in milliseconds the broker will wait before completing fetch requests. The default is
500milliseconds. -
If a minimum batch size in bytes is used, a request is sent when the minimum is reached, or messages have been queued for longer than
fetch.max.wait.ms(whichever comes sooner). Adding the delay allows batches to accumulate messages up to the batch size.
Lowering latency by increasing the fetch request size
Use the fetch.max.bytes and max.partition.fetch.bytes properties to increase the maximum amount of data fetched by the consumer from the Kafka broker.
The fetch.max.bytes property sets a maximum limit in bytes on the amount of data fetched from the broker at one time.
The max.partition.fetch.bytes sets a maximum limit in bytes on how much data is returned for each partition,
which must always be larger than the number of bytes set in the broker or topic configuration for max.message.bytes.
The maximum amount of memory a client can consume is calculated approximately as:
NUMBER-OF-BROKERS * fetch.max.bytes and NUMBER-OF-PARTITIONS * max.partition.fetch.bytesIf memory usage can accommodate it, you can increase the values of these two properties. By allowing more data in each request, latency is improved as there are fewer fetch requests.
# ... fetch.max.bytes=52428800 (1) max.partition.fetch.bytes=1048576 (2) # ...
-
The maximum amount of data in bytes returned for a fetch request.
-
The maximum amount of data in bytes returned for each partition.
Avoiding data loss or duplication when committing offsets
The Kafka auto-commit mechanism allows a consumer to commit the offsets of messages automatically. If enabled, the consumer will commit offsets received from polling the broker at 5000ms intervals.
The auto-commit mechanism is convenient, but it introduces a risk of data loss and duplication. If a consumer has fetched and transformed a number of messages, but the system crashes with processed messages in the consumer buffer when performing an auto-commit, that data is lost. If the system crashes after processing the messages, but before performing the auto-commit, the data is duplicated on another consumer instance after rebalancing.
Auto-committing can avoid data loss only when all messages are processed before the next poll to the broker, or the consumer closes.
To minimize the likelihood of data loss or duplication, you can set enable.auto.commit to false and develop your client application to have more control over committing offsets.
Or you can use auto.commit.interval.ms to decrease the intervals between commits.
# ... enable.auto.commit=false (1) # ...
-
Auto commit is set to false to provide more control over committing offsets.
By setting to enable.auto.commit to false, you can commit offsets after all processing has been performed and the message has been consumed.
For example, you can set up your application to call the Kafka commitSync and commitAsync commit APIs.
The commitSync API commits the offsets in a message batch returned from polling.
You call the API when you are finished processing all the messages in the batch.
If you use the commitSync API, the application will not poll for new messages until the last offset in the batch is committed.
If this negatively affects throughput, you can commit less frequently,
or you can use the commitAsync API.
The commitAsync API does not wait for the broker to respond to a commit request,
but risks creating more duplicates when rebalancing.
A common approach is to combine both commit APIs in an application, with the commitSync API used just before shutting the consumer down or rebalancing to make sure the final commit is successful.
Controlling transactional messages
Consider using transactional ids and enabling idempotence (enable.idempotence=true) on the producer side to guarantee exactly-once delivery.
On the consumer side, you can then use the isolation.level property to control how transactional messages are read by the consumer.
The isolation.level property has two valid values:
-
read_committed -
read_uncommitted(default)
Use read_committed to ensure that only transactional messages that have been committed are read by the consumer.
However, this will cause an increase in end-to-end latency, because the consumer will not be able to return a message until the brokers have written the transaction markers that record the result of the transaction (committed or aborted).
# ... enable.auto.commit=false isolation.level=read_committed (1) # ...
-
Set to
read_committedso that only committed messages are read by the consumer.
Recovering from failure to avoid data loss
Use the session.timeout.ms and heartbeat.interval.ms properties to configure the time taken to check and recover from consumer failure within a consumer group.
The session.timeout.ms property specifies the maximum amount of time in milliseconds a consumer within a consumer group can be out of contact with a broker before being considered inactive and a rebalancing is triggered between the active consumers in the group.
When the group rebalances, the partitions are reassigned to the members of the group.
The heartbeat.interval.ms property specifies the interval in milliseconds between heartbeat checks to the consumer group coordinator to indicate that the consumer is active and connected.
The heartbeat interval must be lower, usually by a third, than the session timeout interval.
If you set the session.timeout.ms property lower, failing consumers are detected earlier, and rebalancing can take place quicker.
However, take care not to set the timeout so low that the broker fails to receive a heartbeat in time and triggers an unnecessary rebalance.
Decreasing the heartbeat interval reduces the chance of accidental rebalancing, but more frequent heartbeats increases the overhead on broker resources.
Managing offset policy
Use the auto.offset.reset property to control how a consumer behaves when no offsets have been committed,
or a committed offset is no longer valid or deleted.
Suppose you deploy a consumer application for the first time, and it reads messages from an existing topic.
Because this is the first time the group.id is used, the __consumer_offsets topic does not contain any offset information for this application.
The new application can start processing all existing messages from the start of the log or only new messages.
The default reset value is latest, which starts at the end of the partition, and consequently means some messages are missed.
To avoid data loss, but increase the amount of processing, set auto.offset.reset to earliest to start at the beginning of the partition.
Also consider using the earliest option to avoid messages being lost when the offsets retention period (offsets.retention.minutes) configured for a broker has ended.
If a consumer group or standalone consumer is inactive and commits no offsets during the retention period, previously committed offsets are deleted from __consumer_offsets.
# ... heartbeat.interval.ms=3000 (1) session.timeout.ms=10000 (2) auto.offset.reset=earliest (3) # ...
-
Adjust the heartbeat interval lower according to anticipated rebalances.
-
If no heartbeats are received by the Kafka broker before the timeout duration expires, the consumer is removed from the consumer group and a rebalance is initiated. If the broker configuration has a
group.min.session.timeout.msandgroup.max.session.timeout.ms, the session timeout value must be within that range. -
Set to
earliestto return to the start of a partition and avoid data loss if offsets were not committed.
If the amount of data returned in a single fetch request is large,
a timeout might occur before the consumer has processed it.
In this case, you can lower max.partition.fetch.bytes or increase session.timeout.ms.
Minimizing the impact of rebalances
The rebalancing of a partition between active consumers in a group is the time it takes for:
-
Consumers to commit their offsets
-
The new consumer group to be formed
-
The group leader to assign partitions to group members
-
The consumers in the group to receive their assignments and start fetching
Clearly, the process increases the downtime of a service, particularly when it happens repeatedly during a rolling restart of a consumer group cluster.
In this situation, you can use the concept of static membership to reduce the number of rebalances. Rebalancing assigns topic partitions evenly among consumer group members. Static membership uses persistence so that a consumer instance is recognized during a restart after a session timeout.
The consumer group coordinator can identify a new consumer instance using a unique id that is specified using the group.instance.id property.
During a restart, the consumer is assigned a new member id, but as a static member it continues with the same instance id,
and the same assignment of topic partitions is made.
If the consumer application does not make a call to poll at least every max.poll.interval.ms milliseconds, the consumer is considered to be failed, causing a rebalance.
If the application cannot process all the records returned from poll in time, you can avoid a rebalance by using the max.poll.interval.ms property to specify the interval in milliseconds between polls for new messages from a consumer.
Or you can use the max.poll.records property to set a maximum limit on the number of records returned from the consumer buffer, allowing your application to process fewer records within the max.poll.interval.ms limit.
# ...
group.instance.id=UNIQUE-ID (1)
max.poll.interval.ms=300000 (2)
max.poll.records=500 (3)
# ...-
The unique instance id ensures that a new consumer instance receives the same assignment of topic partitions.
-
Set the interval to check the consumer is continuing to process messages.
-
Sets the number of processed records returned from the consumer.
10.5. Uninstalling Strimzi
This procedure describes how to uninstall Strimzi and remove resources related to the deployment.
Prerequisites
In order to perform this procedure, identify resources created specifically for a deployment and referenced from the Strimzi resource.
Such resources include:
-
Secrets (Custom CAs and certificates, Kafka Connect secrets, and other Kafka secrets)
-
Logging
ConfigMaps(of typeexternal)
These are resources referenced by Kafka, KafkaConnect, KafkaConnectS2I, KafkaMirrorMaker, or KafkaBridge configuration.
Procedure
-
Delete the Cluster Operator
Deployment, relatedCustomResourceDefinitions, andRBACresources:kubectl delete -f install/cluster-operator
WarningDeleting CustomResourceDefinitionsresults in the garbage collection of the corresponding custom resources (Kafka,KafkaConnect,KafkaConnectS2I,KafkaMirrorMaker, orKafkaBridge) and the resources dependent on them (Deployments, StatefulSets, and other dependent resources). -
Delete the resources you identified in the prerequisites.
Appendix A: Frequently asked questions
A.1. Questions related to the Cluster Operator
A.1.1. Why do I need cluster administrator privileges to install Strimzi?
To install Strimzi, you need to be able to create the following cluster-scoped resources:
-
Custom Resource Definitions (CRDs) to instruct Kubernetes about resources that are specific to Strimzi, such as
KafkaandKafkaConnect -
ClusterRolesandClusterRoleBindings
Cluster-scoped resources, which are not scoped to a particular Kubernetes namespace, typically require cluster administrator privileges to install.
As a cluster administrator, you can inspect all the resources being installed (in the /install/ directory) to ensure that the ClusterRoles do not grant unnecessary privileges.
After installation, the Cluster Operator runs as a regular Deployment, so any standard (non-admin) Kubernetes user with privileges to access the Deployment can configure it.
The cluster administrator can grant standard users the privileges necessary to manage Kafka custom resources.
See also:
A.1.2. Why does the Cluster Operator need to create ClusterRoleBindings?
Kubernetes has built-in privilege escalation prevention, which means that the Cluster Operator cannot grant privileges it does not have itself, specifically, it cannot grant such privileges in a namespace it cannot access. Therefore, the Cluster Operator must have the privileges necessary for all the components it orchestrates.
The Cluster Operator needs to be able to grant access so that:
-
The Topic Operator can manage
KafkaTopics, by creatingRolesandRoleBindingsin the namespace that the operator runs in -
The User Operator can manage
KafkaUsers, by creatingRolesandRoleBindingsin the namespace that the operator runs in -
The failure domain of a
Nodeis discovered by Strimzi, by creating aClusterRoleBinding
When using rack-aware partition assignment, the broker pod needs to be able to get information about the Node it is running on,
for example, the Availability Zone in Amazon AWS.
A Node is a cluster-scoped resource, so access to it can only be granted through a ClusterRoleBinding, not a namespace-scoped RoleBinding.
A.1.3. Can standard Kubernetes users create Kafka custom resources?
By default, standard Kubernetes users will not have the privileges necessary to manage the custom resources handled by the Cluster Operator. The cluster administrator can grant a user the necessary privileges using Kubernetes RBAC resources.
For more information, see Designating Strimzi administrators in the Deploying Strimzi guide.
A.1.4. What do the failed to acquire lock warnings in the log mean?
For each cluster, the Cluster Operator executes only one operation at a time. The Cluster Operator uses locks to make sure that there are never two parallel operations running for the same cluster. Other operations must wait until the current operation completes before the lock is released.
- INFO
-
Examples of cluster operations include cluster creation, rolling update, scale down , and scale up.
If the waiting time for the lock takes too long, the operation times out and the following warning message is printed to the log:
2018-03-04 17:09:24 WARNING AbstractClusterOperations:290 - Failed to acquire lock for kafka cluster lock::kafka::myproject::my-clusterDepending on the exact configuration of STRIMZI_FULL_RECONCILIATION_INTERVAL_MS and STRIMZI_OPERATION_TIMEOUT_MS, this
warning message might appear occasionally without indicating any underlying issues.
Operations that time out are picked up in the next periodic reconciliation, so that the operation can acquire the lock and execute again.
Should this message appear periodically, even in situations when there should be no other operations running for a given cluster, it might indicate that the lock was not properly released due to an error. If this is the case, try restarting the Cluster Operator.
A.1.5. Why is hostname verification failing when connecting to NodePorts using TLS?
Currently, off-cluster access using NodePorts with TLS encryption enabled does not support TLS hostname verification. As a result, the clients that verify the hostname will fail to connect. For example, the Java client will fail with the following exception:
Caused by: java.security.cert.CertificateException: No subject alternative names matching IP address 168.72.15.231 found
at sun.security.util.HostnameChecker.matchIP(HostnameChecker.java:168)
at sun.security.util.HostnameChecker.match(HostnameChecker.java:94)
at sun.security.ssl.X509TrustManagerImpl.checkIdentity(X509TrustManagerImpl.java:455)
at sun.security.ssl.X509TrustManagerImpl.checkIdentity(X509TrustManagerImpl.java:436)
at sun.security.ssl.X509TrustManagerImpl.checkTrusted(X509TrustManagerImpl.java:252)
at sun.security.ssl.X509TrustManagerImpl.checkServerTrusted(X509TrustManagerImpl.java:136)
at sun.security.ssl.ClientHandshaker.serverCertificate(ClientHandshaker.java:1501)
... 17 moreTo connect, you must disable hostname verification.
In the Java client, you can do this by setting the configuration option ssl.endpoint.identification.algorithm to an empty string.
When configuring the client using a properties file, you can do it this way:
ssl.endpoint.identification.algorithm=When configuring the client directly in Java, set the configuration option to an empty string:
props.put("ssl.endpoint.identification.algorithm", "");Appendix B: Custom Resource API Reference
B.1. Common configuration properties
Common configuration properties apply to more than one resource.
B.1.1. replicas
Use the replicas property to configure replicas.
The type of replication depends on the resource.
-
KafkaTopicuses a replication factor to configure the number of replicas of each partition within a Kafka cluster. -
Kafka components use replicas to configure the number of pods in a deployment to provide better availability and scalability.
|
Note
|
When running a Kafka component on Kubernetes it may not be necessary to run multiple replicas for high availability. When the node where the component is deployed crashes, Kubernetes will automatically reschedule the Kafka component pod to a different node. However, running Kafka components with multiple replicas can provide faster failover times as the other nodes will be up and running. |
B.1.2. bootstrapServers
Use the bootstrapServers property to configure a list of bootstrap servers.
The bootstrap server lists can refer to Kafka clusters that are not deployed in the same Kubernetes cluster. They can also refer to a Kafka cluster not deployed by Strimzi.
If on the same Kubernetes cluster, each list must ideally contain the Kafka cluster bootstrap service which is named CLUSTER-NAME-kafka-bootstrap and a port number.
If deployed by Strimzi but on different Kubernetes clusters, the list content depends on the approach used for exposing the clusters (routes, nodeports or loadbalancers).
When using Kafka with a Kafka cluster not managed by Strimzi, you can specify the bootstrap servers list according to the configuration of the given cluster.
B.1.3. ssl
Use the three allowed ssl configuration options for client connection using a specific cipher suite for a TLS version.
A cipher suite combines algorithms for secure connection and data transfer.
You can also configure the ssl.endpoint.identification.algorithm property to enable or disable hostname verification.
Example SSL configuration
# ...
spec:
config:
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384" (1)
ssl.enabled.protocols: "TLSv1.2" (2)
ssl.protocol: "TLSv1.2" (3)
ssl.endpoint.identification.algorithm: HTTPS (4)
# ...-
The cipher suite for TLS using a combination of
ECDHEkey exchange mechanism,RSAauthentication algorithm,AESbulk encyption algorithm andSHA384MAC algorithm. -
The SSl protocol
TLSv1.2is enabled. -
Specifies the
TLSv1.2protocol to generate the SSL context. Allowed values areTLSv1.1andTLSv1.2. -
Hostname verification is enabled by setting to
HTTPS. An empty string disables the verification.
B.1.4. trustedCertificates
Having set tls to configure TLS encryption, use the trustedCertificates property to provide a list of secrets with key names under which the certificates are stored in X.509 format.
You can use the secrets created by the Cluster Operator for the Kafka cluster,
or you can create your own TLS certificate file, then create a Secret from the file:
kubectl create secret generic MY-SECRET \
--from-file=MY-TLS-CERTIFICATE-FILE.crtExample TLS encryption configuration
tls:
trustedCertificates:
- secretName: my-cluster-cluster-cert
certificate: ca.crt
- secretName: my-cluster-cluster-cert
certificate: ca2.crtIf certificates are stored in the same secret, it can be listed multiple times.
If you want to enable TLS, but use the default set of public certification authorities shipped with Java,
you can specify trustedCertificates as an empty array:
Example of enabling TLS with the default Java certificates
tls:
trustedCertificates: []For information on configuring TLS client authentication, see KafkaClientAuthenticationTls schema reference.
B.1.5. resources
You request CPU and memory resources for components. Limits specify the maximum resources that can be consumed by a given container.
Resource requests and limits for the Topic Operator and User Operator are set in the Kafka resource.
Use the reources.requests and resources.limits properties to configure resource requests and limits.
For every deployed container, Strimzi allows you to request specific resources and define the maximum consumption of those resources.
Strimzi supports requests and limits for the following types of resources:
-
cpu -
memory
Strimzi uses the Kubernetes syntax for specifying these resources.
For more information about managing computing resources on Kubernetes, see Managing Compute Resources for Containers.
Resource requests
Requests specify the resources to reserve for a given container. Reserving the resources ensures that they are always available.
|
Important
|
If the resource request is for more than the available free resources in the Kubernetes cluster, the pod is not scheduled. |
A request may be configured for one or more supported resources.
Resource limits
Limits specify the maximum resources that can be consumed by a given container. The limit is not reserved and might not always be available. A container can use the resources up to the limit only when they are available. Resource limits should be always higher than the resource requests.
A resource may be configured for one or more supported limits.
Supported CPU formats
CPU requests and limits are supported in the following formats:
-
Number of CPU cores as integer (
5CPU core) or decimal (2.5CPU core). -
Number or millicpus / millicores (
100m) where 1000 millicores is the same1CPU core.
|
Note
|
The computing power of 1 CPU core may differ depending on the platform where Kubernetes is deployed. |
For more information on CPU specification, see the Meaning of CPU.
Supported memory formats
Memory requests and limits are specified in megabytes, gigabytes, mebibytes, and gibibytes.
-
To specify memory in megabytes, use the
Msuffix. For example1000M. -
To specify memory in gigabytes, use the
Gsuffix. For example1G. -
To specify memory in mebibytes, use the
Misuffix. For example1000Mi. -
To specify memory in gibibytes, use the
Gisuffix. For example1Gi.
For more details about memory specification and additional supported units, see Meaning of memory.
B.1.6. image
Use the image property to configure the container image used by the component.
Overriding container images is recommended only in special situations where you need to use a different container registry or a customized image.
For example, if your network does not allow access to the container repository used by Strimzi, you can copy the Strimzi images or build them from the source. However, if the configured image is not compatible with Strimzi images, it might not work properly.
A copy of the container image might also be customized and used for debugging.
You can specify which container image to use for a component using the image property in the following resources:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper -
Kafka.spec.entityOperator.topicOperator -
Kafka.spec.entityOperator.userOperator -
Kafka.spec.entityOperator.tlsSidecar -
Kafka.spec.jmxTrans -
KafkaConnect.spec -
KafkaConnectS2I.spec -
KafkaMirrorMaker.spec -
KafkaMirrorMaker2.spec -
KafkaBridge.spec
Configuring the image property for Kafka, Kafka Connect, and Kafka MirrorMaker
Kafka, Kafka Connect (including Kafka Connect with S2I support), and Kafka MirrorMaker support multiple versions of Kafka. Each component requires its own image. The default images for the different Kafka versions are configured in the following environment variables:
-
STRIMZI_KAFKA_IMAGES -
STRIMZI_KAFKA_CONNECT_IMAGES -
STRIMZI_KAFKA_CONNECT_S2I_IMAGES -
STRIMZI_KAFKA_MIRROR_MAKER_IMAGES
These environment variables contain mappings between the Kafka versions and their corresponding images.
The mappings are used together with the image and version properties:
-
If neither
imagenorversionare given in the custom resource then theversionwill default to the Cluster Operator’s default Kafka version, and the image will be the one corresponding to this version in the environment variable. -
If
imageis given butversionis not, then the given image is used and theversionis assumed to be the Cluster Operator’s default Kafka version. -
If
versionis given butimageis not, then the image that corresponds to the given version in the environment variable is used. -
If both
versionandimageare given, then the given image is used. The image is assumed to contain a Kafka image with the given version.
The image and version for the different components can be configured in the following properties:
-
For Kafka in
spec.kafka.imageandspec.kafka.version. -
For Kafka Connect, Kafka Connect S2I, and Kafka MirrorMaker in
spec.imageandspec.version.
|
Warning
|
It is recommended to provide only the version and leave the image property unspecified.
This reduces the chance of making a mistake when configuring the custom resource.
If you need to change the images used for different versions of Kafka, it is preferable to configure the Cluster Operator’s environment variables.
|
Configuring the image property in other resources
For the image property in the other custom resources, the given value will be used during deployment.
If the image property is missing, the image specified in the Cluster Operator configuration will be used.
If the image name is not defined in the Cluster Operator configuration, then the default value will be used.
-
For Topic Operator:
-
Container image specified in the
STRIMZI_DEFAULT_TOPIC_OPERATOR_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/operator:0.20.0container image.
-
-
For User Operator:
-
Container image specified in the
STRIMZI_DEFAULT_USER_OPERATOR_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/operator:0.20.0container image.
-
-
For Entity Operator TLS sidecar:
-
Container image specified in the
STRIMZI_DEFAULT_TLS_SIDECAR_ENTITY_OPERATOR_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/kafka:0.20.0-kafka-2.6.0container image.
-
-
For Kafka Exporter:
-
Container image specified in the
STRIMZI_DEFAULT_KAFKA_EXPORTER_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/kafka:0.20.0-kafka-2.6.0container image.
-
-
For Kafka Bridge:
-
Container image specified in the
STRIMZI_DEFAULT_KAFKA_BRIDGE_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/kafka-bridge:0.19.0container image.
-
-
For Kafka broker initializer:
-
Container image specified in the
STRIMZI_DEFAULT_KAFKA_INIT_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/operator:0.20.0container image.
-
-
For Kafka broker initializer:
-
Container image specified in the
STRIMZI_DEFAULT_JMXTRANS_IMAGEenvironment variable from the Cluster Operator configuration. -
strimzi/operator:0.20.0container image.
-
Example of container image configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
image: my-org/my-image:latest
# ...
zookeeper:
# ...B.1.7. livenessProbe and readinessProbe healthchecks
Use the livenessProbe and readinessProbe properties to configure healthcheck probes supported in Strimzi.
Healthchecks are periodical tests which verify the health of an application. When a Healthcheck probe fails, Kubernetes assumes that the application is not healthy and attempts to fix it.
For more details about the probes, see Configure Liveness and Readiness Probes.
Both livenessProbe and readinessProbe support the following options:
-
initialDelaySeconds -
timeoutSeconds -
periodSeconds -
successThreshold -
failureThreshold
Example of liveness and readiness probe configuration
# ...
readinessProbe:
initialDelaySeconds: 15
timeoutSeconds: 5
livenessProbe:
initialDelaySeconds: 15
timeoutSeconds: 5
# ...For more information about the livenessProbe and readinessProbe options, see Probe schema reference.
B.1.8. metrics
Use the metrics property to enable and configure Prometheus metrics.
The metrics property can also contain additional configuration for the Prometheus JMX exporter.
Strimzi supports Prometheus metrics using Prometheus JMX exporter to convert the JMX metrics supported by Apache Kafka and ZooKeeper to Prometheus metrics.
To enable Prometheus metrics export without any further configuration, you can set it to an empty object ({}).
When metrics are enabled, they are exposed on port 9404.
When the metrics property is not defined in the resource, the Prometheus metrics are disabled.
For more information about setting up and deploying Prometheus and Grafana, see Introducing Metrics to Kafka in the Deploying Strimzi guide.
B.1.9. jvmOptions
JVM options can be configured using the jvmOptions property in following resources:
-
Kafka.spec.kafka -
Kafka.spec.zookeeper -
KafkaConnect.spec -
KafkaConnectS2I.spec -
KafkaMirrorMaker.spec -
KafkaMirrorMaker2.spec -
KafkaBridge.spec
Only the following JVM options are supported:
-Xms-
Configures the minimum initial allocation heap size when the JVM starts.
-Xmx-
Configures the maximum heap size.
|
Note
|
The units accepted by JVM settings such as -Xmx and -Xms are those accepted by the JDK java binary in the corresponding image.
Accordingly, 1g or 1G means 1,073,741,824 bytes, and Gi is not a valid unit suffix.
This is in contrast to the units used for memory requests and limits, which follow the Kubernetes convention where 1G means 1,000,000,000 bytes, and 1Gi means 1,073,741,824 bytes
|
The default values used for -Xms and -Xmx depends on whether there is a memory request limit configured for the container.
-
If there is a memory limit, the JVM’s minimum and maximum memory is set to a value corresponding to the limit.
-
If there is no memory limit, the JVM’s minimum memory is set to
128M. The JVM’s maximum memory is not defined to allow the memory to grow as needed, which is ideal for single node environments in test and development.
|
Important
|
Setting
|
When setting -Xmx explicitly, it is recommended to:
-
Set the memory request and the memory limit to the same value
-
Use a memory request that is at least 4.5 × the
-Xmx -
Consider setting
-Xmsto the same value as-Xmx
|
Important
|
Containers doing lots of disk I/O (such as Kafka broker containers) will need to leave some memory available for use as an operating system page cache. On such containers, the requested memory should be significantly higher than the memory used by the JVM. |
Example fragment configuring
-Xmx and -Xms# ...
jvmOptions:
"-Xmx": "2g"
"-Xms": "2g"
# ...In the above example, the JVM will use 2 GiB (=2,147,483,648 bytes) for its heap. Its total memory usage will be approximately 8GiB.
Setting the same value for initial (-Xms) and maximum (-Xmx) heap sizes avoids the JVM having to allocate memory after startup, at the cost of possibly allocating more heap than is really needed.
For Kafka and ZooKeeper pods such allocation could cause unwanted latency.
For Kafka Connect avoiding over allocation may be the most important concern, especially in distributed mode where the effects of over-allocation is multiplied by the number of consumers.
-server
-server enables the server JVM. This option can be set to true or false.
Example fragment configuring
-server# ...
jvmOptions:
"-server": true
# ...|
Note
|
When neither of the two options (-server and -XX) are specified, the default Apache Kafka configuration of KAFKA_JVM_PERFORMANCE_OPTS is used.
|
-XX
-XX object can be used for configuring advanced runtime options of a JVM.
The -server and -XX options are used to configure the KAFKA_JVM_PERFORMANCE_OPTS option of Apache Kafka.
Example showing the use of the
-XX objectjvmOptions:
"-XX":
"UseG1GC": true
"MaxGCPauseMillis": 20
"InitiatingHeapOccupancyPercent": 35
"ExplicitGCInvokesConcurrent": trueThe example configuration above will result in the following JVM options:
-XX:+UseG1GC -XX:MaxGCPauseMillis=20 -XX:InitiatingHeapOccupancyPercent=35 -XX:+ExplicitGCInvokesConcurrent -XX:-UseParNewGC|
Note
|
When neither of the two options (-server and -XX) are specified, the default Apache Kafka configuration of KAFKA_JVM_PERFORMANCE_OPTS is used.
|
B.1.10. Garbage collector logging
The jvmOptions property also allows you to enable and disable garbage collector (GC) logging.
GC logging is disabled by default.
To enable it, set the gcLoggingEnabled property as follows:
Example of enabling GC logging
# ...
jvmOptions:
gcLoggingEnabled: true
# ...B.2. Kafka schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka and ZooKeeper clusters, and Topic Operator. |
status |
The status of the Kafka and ZooKeeper clusters, and Topic Operator. |
B.3. KafkaSpec schema reference
Used in: Kafka
| Property | Description |
|---|---|
kafka |
Configuration of the Kafka cluster. |
zookeeper |
Configuration of the ZooKeeper cluster. |
topicOperator |
The property |
entityOperator |
Configuration of the Entity Operator. |
clusterCa |
Configuration of the cluster certificate authority. |
clientsCa |
Configuration of the clients certificate authority. |
cruiseControl |
Configuration for Cruise Control deployment. Deploys a Cruise Control instance when specified. |
jmxTrans |
Configuration for JmxTrans. When the property is present a JmxTrans deployment is created for gathering JMX metrics from each Kafka broker. For more information see JmxTrans GitHub. |
kafkaExporter |
Configuration of the Kafka Exporter. Kafka Exporter can provide additional metrics, for example lag of consumer group at topic/partition. |
maintenanceTimeWindows |
A list of time windows for maintenance tasks (that is, certificates renewal). Each time window is defined by a cron expression. |
string array |
B.4. KafkaClusterSpec schema reference
Used in: KafkaSpec
Configures a Kafka cluster.
B.4.1. listeners
Use the listeners property to configure listeners to provide access to Kafka brokers.
Example configuration of a plain (unencrypted) listener without authentication
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
spec:
kafka:
# ...
listeners:
- name: plain
port: 9092
type: internal
tls: false
# ...
zookeeper:
# ...B.4.2. config
Use the config properties to configure Kafka brokers as keys with values in one of the following JSON types:
-
String
-
Number
-
Boolean
You can specify and configure all of the options in the "Broker Configs" section of the Apache Kafka documentation apart from those managed directly by Strimzi. Specifically, all configuration options with keys equal to or starting with one of the following strings are forbidden:
-
listeners -
advertised. -
broker. -
listener. -
host.name -
port -
inter.broker.listener.name -
sasl. -
ssl. -
security. -
password. -
principal.builder.class -
log.dir -
zookeeper.connect -
zookeeper.set.acl -
authorizer. -
super.user
When a forbidden option is present in the config property, it is ignored and a warning message is printed to the Cluster Operator log file.
All other supported options are passed to Kafka.
There are exceptions to the forbidden options.
For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
You can also configure the zookeeper.connection.timeout.ms property to set the maximum time allowed for establishing a ZooKeeper connection.
Example Kafka broker configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
# ...
config:
num.partitions: 1
num.recovery.threads.per.data.dir: 1
default.replication.factor: 3
offsets.topic.replication.factor: 3
transaction.state.log.replication.factor: 3
transaction.state.log.min.isr: 1
log.retention.hours: 168
log.segment.bytes: 1073741824
log.retention.check.interval.ms: 300000
num.network.threads: 3
num.io.threads: 8
socket.send.buffer.bytes: 102400
socket.receive.buffer.bytes: 102400
socket.request.max.bytes: 104857600
group.initial.rebalance.delay.ms: 0
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384"
ssl.enabled.protocols: "TLSv1.2"
ssl.protocol: "TLSv1.2"
zookeeper.connection.timeout.ms: 6000
# ...| Property | Description |
|---|---|
replicas |
The number of pods in the cluster. |
integer |
|
image |
The docker image for the pods. The default value depends on the configured |
string |
|
storage |
Storage configuration (disk). Cannot be updated. The type depends on the value of the |
listeners |
Configures listeners of Kafka brokers. |
|
|
authorization |
Authorization configuration for Kafka brokers. The type depends on the value of the |
|
|
config |
Kafka broker config properties with the following prefixes cannot be set: listeners, advertised., broker., listener., host.name, port, inter.broker.listener.name, sasl., ssl., security., password., principal.builder.class, log.dir, zookeeper.connect, zookeeper.set.acl, zookeeper.ssl, zookeeper.clientCnxnSocket, authorizer., super.user, cruise.control.metrics.topic, cruise.control.metrics.reporter.bootstrap.servers (with the exception of: zookeeper.connection.timeout.ms, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols,cruise.control.metrics.topic.num.partitions, cruise.control.metrics.topic.replication.factor, cruise.control.metrics.topic.retention.ms,cruise.control.metrics.topic.auto.create.retries, cruise.control.metrics.topic.auto.create.timeout.ms). |
map |
|
rack |
Configuration of the |
brokerRackInitImage |
The image of the init container used for initializing the |
string |
|
affinity |
The property |
tolerations |
The property |
Toleration array |
|
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
jvmOptions |
JVM Options for pods. |
jmxOptions |
JMX Options for Kafka brokers. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
metrics |
The Prometheus JMX Exporter configuration. See https://github.com/prometheus/jmx_exporter for details of the structure of this configuration. |
map |
|
logging |
Logging configuration for Kafka. The type depends on the value of the |
tlsSidecar |
The property |
template |
Template for Kafka cluster resources. The template allows users to specify how are the |
version |
The kafka broker version. Defaults to 2.6.0. Consult the user documentation to understand the process required to upgrade or downgrade the version. |
string |
B.5. EphemeralStorage schema reference
Used in: JbodStorage, KafkaClusterSpec, ZookeeperClusterSpec
The type property is a discriminator that distinguishes the use of the type EphemeralStorage from PersistentClaimStorage.
It must have the value ephemeral for the type EphemeralStorage.
| Property | Description |
|---|---|
id |
Storage identification number. It is mandatory only for storage volumes defined in a storage of type 'jbod'. |
integer |
|
sizeLimit |
When type=ephemeral, defines the total amount of local storage required for this EmptyDir volume (for example 1Gi). |
string |
|
type |
Must be |
string |
B.6. PersistentClaimStorage schema reference
Used in: JbodStorage, KafkaClusterSpec, ZookeeperClusterSpec
The type property is a discriminator that distinguishes the use of the type PersistentClaimStorage from EphemeralStorage.
It must have the value persistent-claim for the type PersistentClaimStorage.
| Property | Description |
|---|---|
type |
Must be |
string |
|
size |
When type=persistent-claim, defines the size of the persistent volume claim (i.e 1Gi). Mandatory when type=persistent-claim. |
string |
|
selector |
Specifies a specific persistent volume to use. It contains key:value pairs representing labels for selecting such a volume. |
map |
|
deleteClaim |
Specifies if the persistent volume claim has to be deleted when the cluster is un-deployed. |
boolean |
|
class |
The storage class to use for dynamic volume allocation. |
string |
|
id |
Storage identification number. It is mandatory only for storage volumes defined in a storage of type 'jbod'. |
integer |
|
overrides |
Overrides for individual brokers. The |
B.7. PersistentClaimStorageOverride schema reference
Used in: PersistentClaimStorage
| Property | Description |
|---|---|
class |
The storage class to use for dynamic volume allocation for this broker. |
string |
|
broker |
Id of the kafka broker (broker identifier). |
integer |
B.8. JbodStorage schema reference
Used in: KafkaClusterSpec
The type property is a discriminator that distinguishes the use of the type JbodStorage from EphemeralStorage, PersistentClaimStorage.
It must have the value jbod for the type JbodStorage.
| Property | Description |
|---|---|
type |
Must be |
string |
|
volumes |
List of volumes as Storage objects representing the JBOD disks array. |
B.9. GenericKafkaListener schema reference
Used in: KafkaClusterSpec
Configures listeners to connect to Kafka brokers within and outside Kubernetes.
You configure the listeners in the Kafka resource.
Example
Kafka resource showing listener configurationapiVersion: kafka.strimzi.io/v1beta1
kind: Kafka
metadata:
name: my-cluster
spec:
kafka:
#...
listeners:
- name: plain
port: 9092
type: internal
tls: false
- name: tls
port: 9093
type: internal
tls: true
authentication:
type: tls
- name: external1
port: 9094
type: route
tls: true
- name: external2
port: 9095
type: ingress
tls: false
authentication:
type: tls
configuration:
bootstrap:
host: bootstrap.myingress.com
brokers:
- broker: 0
host: broker-0.myingress.com
- broker: 1
host: broker-1.myingress.com
- broker: 2
host: broker-2.myingress.com
#...B.9.1. listeners
You configure Kafka broker listeners using the listeners property in the Kafka resource.
Listeners are defined as an array.
Example listener configuration
listeners:
- name: plain
port: 9092
type: internal
tls: falseThe name and port must be unique within the Kafka cluster. The name can be up to 25 characters long, comprising lower-case letters and numbers. Allowed port numbers are 9092 and higher with the exception of ports 9404 and 9999, which are already used for Prometheus and JMX.
By specifying a unique name and port for each listener, you can configure multiple listeners.
B.9.2. type
The type is set as internal,
or for external listeners, as route, loadbalancer, nodeport or ingress.
- internal
-
You can configure internal listeners with or without encryption using the
tlsproperty.Exampleinternallistener configuration#... spec: kafka: #... listeners: #... - name: plain port: 9092 type: internal tls: false - name: tls port: 9093 type: internal tls: true authentication: type: tls #... - route
-
Configures an external listener to expose Kafka using OpenShift
Routesand the HAProxy router.A dedicated
Routeis created for every Kafka broker pod. An additionalRouteis created to serve as a Kafka bootstrap address. Kafka clients can use theseRoutesto connect to Kafka on port 443. The client connects on port 443, the default router port, but traffic is then routed to the port you configure, which is9094in this example.Exampleroutelistener configuration#... spec: kafka: #... listeners: #... - name: external1 port: 9094 type: route tls: true #... - ingress
-
Configures an external listener to expose Kafka using Kubernetes
Ingressand the NGINX Ingress Controller for Kubernetes.A dedicated
Ingressresource is created for every Kafka broker pod. An additionalIngressresource is created to serve as a Kafka bootstrap address. Kafka clients can use theseIngressresources to connect to Kafka on port 443. The client connects on port 443, the default controller port, but traffic is then routed to the port you configure, which is9095in the following example.You must specify the hostnames used by the bootstrap and per-broker services using
GenericKafkaListenerConfigurationBootstrapandGenericKafkaListenerConfigurationBrokerproperties.Exampleingresslistener configuration#... spec: kafka: #... listeners: #... - name: external2 port: 9095 type: ingress tls: false authentication: type: tls configuration: bootstrap: host: bootstrap.myingress.com brokers: - broker: 0 host: broker-0.myingress.com - broker: 1 host: broker-1.myingress.com - broker: 2 host: broker-2.myingress.com #...NoteExternal listeners using Ingressare currently only tested with the NGINX Ingress Controller for Kubernetes. - loadbalancer
-
Configures an external listener to expose Kafka
LoadbalancertypeServices.A new loadbalancer service is created for every Kafka broker pod. An additional loadbalancer is created to serve as a Kafka bootstrap address. Loadbalancers listen to the specified port number, which is port
9094in the following example.You can use the
loadBalancerSourceRangesproperty to configure source ranges to restrict access to the specified IP addresses.Exampleloadbalancerlistener configuration#... spec: kafka: #... listeners: - name: external3 port: 9094 type: loadbalancer tls: true configuration: loadBalancerSourceRanges: - 10.0.0.0/8 - 88.208.76.87/32 #... - nodeport
-
Configures an external listener to expose Kafka using
NodePorttypeServices.Kafka clients connect directly to the nodes of Kubernetes. An additional
NodePorttype of service is created to serve as a Kafka bootstrap address.When configuring the advertised addresses for the Kafka broker pods, Strimzi uses the address of the node on which the given pod is running. You can use
preferredNodePortAddressTypeproperty to configure the first address type checked as the node address.Examplenodeportlistener configuration#... spec: kafka: #... listeners: #... - name: external4 port: 9095 type: nodeport tls: false configuration: preferredNodePortAddressType: InternalDNS #...NoteTLS hostname verification is not currently supported when exposing Kafka clusters using node ports.
B.9.3. port
The port number is the port used in the Kafka cluster, which might not be the same port used for access by a client.
-
loadbalancerlisteners use the specified port number, as dointernallisteners -
ingressandroutelisteners use port 443 for access -
nodeportlisteners use the port number assigned by Kubernetes
For client connection, use the address and port for the bootstrap service of the listener.
You can retrieve this from the status of the Kafka resource.
Example command to retrieve the address and port for client connection
kubectl get kafka KAFKA-CLUSTER-NAME -o=jsonpath='{.status.listeners[?(@.type=="external")].bootstrapServers}{"\n"}'|
Note
|
Listeners cannot be configured to use the ports set aside for interbroker communication (9091) and metrics (9404). |
B.9.4. tls
The TLS property is required.
By default, TLS encryption is not enabled.
To enable it, set the tls property to true.
TLS encryption is always used with route listeners.
B.9.5. authentication
Authentication for the listener can be specified as:
-
Mutual TLS (
tls) -
SCRAM-SHA-512 (
scram-sha-512) -
Token-based OAuth 2.0 (
oauth).
B.9.6. networkPolicyPeers
Use networkPolicyPeers to configure network policies that restrict access to a listener at the network level.
The following example shows a networkPolicyPeers configuration for a plain and a tls listener.
listeners:
#...
- name: plain
port: 9092
type: internal
tls: true
authentication:
type: scram-sha-512
networkPolicyPeers:
- podSelector:
matchLabels:
app: kafka-sasl-consumer
- podSelector:
matchLabels:
app: kafka-sasl-producer
- name: tls
port: 9093
type: internal
tls: true
authentication:
type: tls
networkPolicyPeers:
- namespaceSelector:
matchLabels:
project: myproject
- namespaceSelector:
matchLabels:
project: myproject2
# ...In the example:
-
Only application pods matching the labels
app: kafka-sasl-consumerandapp: kafka-sasl-producercan connect to theplainlistener. The application pods must be running in the same namespace as the Kafka broker. -
Only application pods running in namespaces matching the labels
project: myprojectandproject: myproject2can connect to thetlslistener.
The syntax of the networkPolicyPeers field is the same as the from field in NetworkPolicy resources.
Backwards compatibility with
KafkaListenersGenericKafkaListener replaces the KafkaListeners schema, which is now deprecated.
To convert the listeners configured using the KafkaListeners schema into the format of the GenericKafkaListener schema, with backwards compatibility,
use the following names, ports and types:
listeners:
#...
- name: plain
port: 9092
type: internal
tls: false
- name: tls
port: 9093
type: internal
tls: true
- name: external
port: 9094
type: EXTERNAL-LISTENER-TYPE (1)
tls: true
# ...-
Options:
ingress,loadbalancer,nodeport,route
| Property | Description |
|---|---|
name |
Name of the listener. The name will be used to identify the listener and the related Kubernetes objects. The name has to be unique within given a Kafka cluster. The name can consist of lowercase characters and numbers and be up to 11 characters long. |
string |
|
port |
Port number used by the listener inside Kafka. The port number has to be unique within a given Kafka cluster. Allowed port numbers are 9092 and higher with the exception of ports 9404 and 9999, which are already used for Prometheus and JMX. Depending on the listener type, the port number might not be the same as the port number that connects Kafka clients. |
integer |
|
type |
Type of the listener. Currently the supported types are * |
string (one of [ingress, internal, route, loadbalancer, nodeport]) |
|
tls |
Enables TLS encryption on the listener. This is a required property. |
boolean |
|
authentication |
Authentication configuration for this listener. The type depends on the value of the |
|
|
configuration |
Additional listener configuration. |
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
B.10. KafkaListenerAuthenticationTls schema reference
Used in: GenericKafkaListener, KafkaListenerExternalIngress, KafkaListenerExternalLoadBalancer, KafkaListenerExternalNodePort, KafkaListenerExternalRoute, KafkaListenerPlain, KafkaListenerTls
The type property is a discriminator that distinguishes the use of the type KafkaListenerAuthenticationTls from KafkaListenerAuthenticationScramSha512, KafkaListenerAuthenticationOAuth.
It must have the value tls for the type KafkaListenerAuthenticationTls.
| Property | Description |
|---|---|
type |
Must be |
string |
B.11. KafkaListenerAuthenticationScramSha512 schema reference
Used in: GenericKafkaListener, KafkaListenerExternalIngress, KafkaListenerExternalLoadBalancer, KafkaListenerExternalNodePort, KafkaListenerExternalRoute, KafkaListenerPlain, KafkaListenerTls
The type property is a discriminator that distinguishes the use of the type KafkaListenerAuthenticationScramSha512 from KafkaListenerAuthenticationTls, KafkaListenerAuthenticationOAuth.
It must have the value scram-sha-512 for the type KafkaListenerAuthenticationScramSha512.
| Property | Description |
|---|---|
type |
Must be |
string |
B.12. KafkaListenerAuthenticationOAuth schema reference
Used in: GenericKafkaListener, KafkaListenerExternalIngress, KafkaListenerExternalLoadBalancer, KafkaListenerExternalNodePort, KafkaListenerExternalRoute, KafkaListenerPlain, KafkaListenerTls
The type property is a discriminator that distinguishes the use of the type KafkaListenerAuthenticationOAuth from KafkaListenerAuthenticationTls, KafkaListenerAuthenticationScramSha512.
It must have the value oauth for the type KafkaListenerAuthenticationOAuth.
| Property | Description |
|---|---|
accessTokenIsJwt |
Configure whether the access token is treated as JWT. This must be set to |
boolean |
|
checkAccessTokenType |
Configure whether the access token type check is performed or not. This should be set to |
boolean |
|
checkIssuer |
Enable or disable issuer checking. By default issuer is checked using the value configured by |
boolean |
|
clientId |
OAuth Client ID which the Kafka broker can use to authenticate against the authorization server and use the introspect endpoint URI. |
string |
|
clientSecret |
Link to Kubernetes Secret containing the OAuth client secret which the Kafka broker can use to authenticate against the authorization server and use the introspect endpoint URI. |
disableTlsHostnameVerification |
Enable or disable TLS hostname verification. Default value is |
boolean |
|
enableECDSA |
Enable or disable ECDSA support by installing BouncyCastle crypto provider. Default value is |
boolean |
|
fallbackUserNameClaim |
The fallback username claim to be used for the user id if the claim specified by |
string |
|
fallbackUserNamePrefix |
The prefix to use with the value of |
string |
|
introspectionEndpointUri |
URI of the token introspection endpoint which can be used to validate opaque non-JWT tokens. |
string |
|
jwksEndpointUri |
URI of the JWKS certificate endpoint, which can be used for local JWT validation. |
string |
|
jwksExpirySeconds |
Configures how often are the JWKS certificates considered valid. The expiry interval has to be at least 60 seconds longer then the refresh interval specified in |
integer |
|
jwksMinRefreshPauseSeconds |
The minimum pause between two consecutive refreshes. When an unknown signing key is encountered the refresh is scheduled immediately, but will always wait for this minimum pause. Defaults to 1 second. |
integer |
|
jwksRefreshSeconds |
Configures how often are the JWKS certificates refreshed. The refresh interval has to be at least 60 seconds shorter then the expiry interval specified in |
integer |
|
maxSecondsWithoutReauthentication |
Maximum number of seconds the authenticated session remains valid without re-authentication. This enables Apache Kafka re-authentication feature, and causes sessions to expire when the access token expires. If the access token expires before max time or if max time is reached, the client has to re-authenticate, otherwise the server will drop the connection. Not set by default - the authenticated session does not expire when the access token expires. |
integer |
|
tlsTrustedCertificates |
Trusted certificates for TLS connection to the OAuth server. |
|
|
type |
Must be |
string |
|
userInfoEndpointUri |
URI of the User Info Endpoint to use as a fallback to obtaining the user id when the Introspection Endpoint does not return information that can be used for the user id. |
string |
|
userNameClaim |
Name of the claim from the JWT authentication token, Introspection Endpoint response or User Info Endpoint response which will be used to extract the user id. Defaults to |
string |
|
validIssuerUri |
URI of the token issuer used for authentication. |
string |
|
validTokenType |
Valid value for the |
string |
B.13. GenericSecretSource schema reference
| Property | Description |
|---|---|
key |
The key under which the secret value is stored in the Kubernetes Secret. |
string |
|
secretName |
The name of the Kubernetes Secret containing the secret value. |
string |
B.14. CertSecretSource schema reference
Used in: KafkaAuthorizationKeycloak, KafkaBridgeTls, KafkaClientAuthenticationOAuth, KafkaConnectTls, KafkaListenerAuthenticationOAuth, KafkaMirrorMaker2Tls, KafkaMirrorMakerTls
| Property | Description |
|---|---|
certificate |
The name of the file certificate in the Secret. |
string |
|
secretName |
The name of the Secret containing the certificate. |
string |
B.15. GenericKafkaListenerConfiguration schema reference
Used in: GenericKafkaListener
Configuration for Kafka listeners.
B.15.1. brokerCertChainAndKey
The brokerCertChainAndKey property is only used with listeners that have TLS encryption enabled.
You can use the property to providing your own Kafka listener certificates.
Example configuration for a
loadbalancer external listener with TLS encryption enabledlisteners:
#...
- name: external
port: 9094
type: loadbalancer
tls: true
authentication:
type: tls
configuration:
brokerCertChainAndKey:
secretName: my-secret
certificate: my-listener-certificate.crt
key: my-listener-key.key
# ...B.15.2. externalTrafficPolicy
The externalTrafficPolicy property is used with loadbalancer and nodeport listeners.
When exposing Kafka outside of Kubernetes you can choose Local or Cluster.
Local avoids hops to other nodes and preserves the client IP, whereas Cluster does neither.
The default is Cluster.
B.15.3. loadBalancerSourceRanges
The loadBalancerSourceRanges property is only used with loadbalancer listeners.
When exposing Kafka outside of Kubernetes use source ranges, in addition to labels and annotations, to customize how a service is created.
Example source ranges configured for a loadbalancer listener
listeners:
#...
- name: external
port: 9094
type: loadbalancer
tls: false
configuration:
externalTrafficPolicy: Local
loadBalancerSourceRanges:
- 10.0.0.0/8
- 88.208.76.87/32
# ...
# ...B.15.4. class
The class property is only used with ingress listeners.
By default, the Ingress class is set to nginx.
You can change the Ingress class using the class property.
Example of an external listener of type
ingress using Ingress class nginx-internallisteners:
#...
- name: external
port: 9094
type: ingress
tls: false
configuration:
class: nginx-internal
# ...
# ...B.15.5. preferredNodePortAddressType
The preferredNodePortAddressType property is only used with nodeport listeners.
Use the preferredNodePortAddressType property in your listener configuration to specify the first address type checked as the node address.
This property is useful, for example, if your deployment does not have DNS support, or you only want to expose a broker internally through an internal DNS or IP address.
If an address of this type is found, it is used.
If the preferred address type is not found, Strimzi proceeds through the types in the standard order of priority:
-
ExternalDNS
-
ExternalIP
-
Hostname
-
InternalDNS
-
InternalIP
Example of an external listener configured with a preferred node port address type
listeners:
#...
- name: external
port: 9094
type: nodeport
tls: false
configuration:
preferredNodePortAddressType: InternalDNS
# ...
# ...B.15.6. useServiceDnsDomain
The useServiceDnsDomain property is only used with internal listeners.
It defines whether the fully-qualified DNS names that include the cluster service suffix (usually .cluster.local) are used.
With useServiceDnsDomain set as false, the advertised addresses are generated without the service suffix; for example, my-cluster-kafka-0.my-cluster-kafka-brokers.myproject.svc.
With useServiceDnsDomain set as true, the advertised addresses are generated with the service suffix; for example, my-cluster-kafka-0.my-cluster-kafka-brokers.myproject.svc.cluster.local.
Default is false.
Example of an internal listener configured to use the Service DNS domain
listeners:
#...
- name: plain
port: 9092
type: internal
tls: false
configuration:
useServiceDnsDomain: true
# ...
# ...If your Kubernetes cluster uses a different service suffix than .cluster.local, you can configure the suffix using the KUBERNETES_SERVICE_DNS_DOMAIN environment variable in the Cluster Operator configuration.
See Cluster Operator configuration for more details.
| Property | Description |
|---|---|
brokerCertChainAndKey |
Reference to the |
externalTrafficPolicy |
Specifies whether the service routes external traffic to node-local or cluster-wide endpoints. |
string (one of [Local, Cluster]) |
|
loadBalancerSourceRanges |
A list of CIDR ranges (for example |
string array |
|
bootstrap |
Bootstrap configuration. |
brokers |
Per-broker configurations. |
class |
Configures the |
string |
|
preferredNodePortAddressType |
Defines which address type should be used as the node address. Available types are: This field can be used to select the address type which will be used as the preferred type and checked first. In case no address will be found for this address type, the other types will be used in the default order.This field can be used only with |
string (one of [ExternalDNS, ExternalIP, Hostname, InternalIP, InternalDNS]) |
|
useServiceDnsDomain |
Configures whether the Kubernetes service DNS domain should be used or not. If set to |
boolean |
B.16. CertAndKeySecretSource schema reference
Used in: GenericKafkaListenerConfiguration, IngressListenerConfiguration, KafkaClientAuthenticationTls, KafkaListenerExternalConfiguration, NodePortListenerConfiguration, TlsListenerConfiguration
| Property | Description |
|---|---|
certificate |
The name of the file certificate in the Secret. |
string |
|
key |
The name of the private key in the Secret. |
string |
|
secretName |
The name of the Secret containing the certificate. |
string |
B.17. GenericKafkaListenerConfigurationBootstrap schema reference
Used in: GenericKafkaListenerConfiguration
Configures bootstrap service overrides for external listeners.
Broker service equivalents of nodePort, host, loadBalancerIP and annotations properties are configured in the GenericKafkaListenerConfigurationBroker schema.
B.17.1. alternativeNames
You can specify alternative names for the bootstrap service.
The names are added to the broker certificates and can be used for TLS hostname verification.
The alternativeNames property is applicable to all types of external listeners.
Example of an external
route listener configured with an additional bootstrap addresslisteners:
#...
- name: external
port: 9094
type: route
tls: true
authentication:
type: tls
configuration:
bootstrap:
alternativeNames:
- example.hostname1
- example.hostname2
# ...B.17.2. host
The host property is used with route and ingress listeners to specify the hostnames used by the bootstrap and per-broker services.
A host property value is mandatory for ingress listener configuration, as the Ingress controller does not assign any hostnames automatically.
Make sure that the hostnames resolve to the Ingress endpoints.
Strimzi will not perform any validation that the requested hosts are available and properly routed to the Ingress endpoints.
Example of host configuration for an ingress listener
listeners:
#...
- name: external
port: 9094
type: ingress
tls: true
authentication:
type: tls
configuration:
bootstrap:
host: bootstrap.myingress.com
brokers:
- broker: 0
host: broker-0.myingress.com
- broker: 1
host: broker-1.myingress.com
- broker: 2
host: broker-2.myingress.com
# ...By default, route listener hosts are automatically assigned by OpenShift.
However, you can override the assigned route hosts by specifying hosts.
Strimzi does not perform any validation that the requested hosts are available. You must ensure that they are free and can be used.
Example of host configuration for a route listener
# ...
listeners:
#...
- name: external
port: 9094
type: route
tls: true
authentication:
type: tls
configuration:
bootstrap:
host: bootstrap.myrouter.com
brokers:
- broker: 0
host: broker-0.myrouter.com
- broker: 1
host: broker-1.myrouter.com
- broker: 2
host: broker-2.myrouter.com
# ...B.17.3. nodePort
By default, the port numbers used for the bootstrap and broker services are automatically assigned by Kubernetes.
You can override the assigned node ports for nodeport listeners by specifying the requested port numbers.
Strimzi does not perform any validation on the requested ports. You must ensure that they are free and available for use.
Example of an external listener configured with overrides for node ports
# ...
listeners:
#...
- name: external
port: 9094
type: nodeport
tls: true
authentication:
type: tls
configuration:
bootstrap:
nodePort: 32100
brokers:
- broker: 0
nodePort: 32000
- broker: 1
nodePort: 32001
- broker: 2
nodePort: 32002
# ...B.17.4. loadBalancerIP
Use the loadBalancerIP property to request a specific IP address when creating a loadbalancer.
Use this property when you need to use a loadbalancer with a specific IP address.
The loadBalancerIP field is ignored if the cloud provider does not support the feature.
Example of an external listener of type
loadbalancer with specific loadbalancer IP address requests# ...
listeners:
#...
- name: external
port: 9094
type: loadbalancer
tls: true
authentication:
type: tls
configuration:
bootstrap:
loadBalancerIP: 172.29.3.10
brokers:
- broker: 0
loadBalancerIP: 172.29.3.1
- broker: 1
loadBalancerIP: 172.29.3.2
- broker: 2
loadBalancerIP: 172.29.3.3
# ...B.17.5. annotations
Use the annotations property to add annotations to loadbalancer, nodeport or ingress listeners.
You can use these annotations to instrument DNS tooling such as External DNS, which automatically assigns DNS names to the loadbalancer services.
Example of an external listener of type
loadbalancer using annotations# ...
listeners:
#...
- name: external
port: 9094
type: loadbalancer
tls: true
authentication:
type: tls
configuration:
bootstrap:
annotations:
external-dns.alpha.kubernetes.io/hostname: kafka-bootstrap.mydomain.com.
external-dns.alpha.kubernetes.io/ttl: "60"
brokers:
- broker: 0
annotations:
external-dns.alpha.kubernetes.io/hostname: kafka-broker-0.mydomain.com.
external-dns.alpha.kubernetes.io/ttl: "60"
- broker: 1
annotations:
external-dns.alpha.kubernetes.io/hostname: kafka-broker-1.mydomain.com.
external-dns.alpha.kubernetes.io/ttl: "60"
- broker: 2
annotations:
external-dns.alpha.kubernetes.io/hostname: kafka-broker-2.mydomain.com.
external-dns.alpha.kubernetes.io/ttl: "60"
# ...| Property | Description |
|---|---|
alternativeNames |
Additional alternative names for the bootstrap service. The alternative names will be added to the list of subject alternative names of the TLS certificates. |
string array |
|
host |
The bootstrap host. This field will be used in the Ingress resource or in the Route resource to specify the desired hostname. This field can be used only with |
string |
|
nodePort |
Node port for the bootstrap service. This field can be used only with |
integer |
|
loadBalancerIP |
The loadbalancer is requested with the IP address specified in this field. This feature depends on whether the underlying cloud provider supports specifying the |
string |
|
annotations |
Annotations that will be added to the |
map |
B.18. GenericKafkaListenerConfigurationBroker schema reference
Used in: GenericKafkaListenerConfiguration
Configures broker service overrides for external listeners.
You can see example configuration for the nodePort, host, loadBalancerIP and annotations properties in the GenericKafkaListenerConfigurationBootstrap schema,
which configures bootstrap service overrides for external listeners.
Advertised addresses for brokers
By default, Strimzi tries to automatically determine the hostnames and ports that your Kafka cluster advertises to its clients. This is not sufficient in all situations, because the infrastructure on which Strimzi is running might not provide the right hostname or port through which Kafka can be accessed.
You can specify a broker ID and customize the advertised hostname and port in the configuration property of the external listener.
Strimzi will then automatically configure the advertised address in the Kafka brokers and add it to the broker certificates so it can be used for TLS hostname verification.
Overriding the advertised host and ports is available for all types of external listeners.
Example of an external
route listener configured with overrides for advertised addresseslisteners:
#...
- name: external
port: 9094
type: route
tls: true
authentication:
type: tls
configuration:
brokers:
- broker: 0
advertisedHost: example.hostname.0
advertisedPort: 12340
- broker: 1
advertisedHost: example.hostname.1
advertisedPort: 12341
- broker: 2
advertisedHost: example.hostname.2
advertisedPort: 12342
# ...| Property | Description |
|---|---|
broker |
ID of the kafka broker (broker identifier). Broker IDs start from 0 and correspond to the number of broker replicas. |
integer |
|
advertisedHost |
The host name which will be used in the brokers' |
string |
|
advertisedPort |
The port number which will be used in the brokers' |
integer |
|
host |
The broker host. This field will be used in the Ingress resource or in the Route resource to specify the desired hostname. This field can be used only with |
string |
|
nodePort |
Node port for the per-broker service. This field can be used only with |
integer |
|
loadBalancerIP |
The loadbalancer is requested with the IP address specified in this field. This feature depends on whether the underlying cloud provider supports specifying the |
string |
|
annotations |
Annotations that will be added to the |
map |
B.19. KafkaListeners schema reference
The type KafkaListeners has been deprecated.
Please use GenericKafkaListener instead.
Used in: KafkaClusterSpec
Refer to previous documentation for example configuration.
| Property | Description |
|---|---|
plain |
Configures plain listener on port 9092. |
tls |
Configures TLS listener on port 9093. |
external |
Configures external listener on port 9094. The type depends on the value of the |
|
B.20. KafkaListenerPlain schema reference
Used in: KafkaListeners
| Property | Description |
|---|---|
authentication |
Authentication configuration for this listener. Since this listener does not use TLS transport you cannot configure an authentication with |
|
|
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
B.21. KafkaListenerTls schema reference
Used in: KafkaListeners
| Property | Description |
|---|---|
authentication |
Authentication configuration for this listener. The type depends on the value of the |
|
|
configuration |
Configuration of TLS listener. |
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
B.22. TlsListenerConfiguration schema reference
Used in: KafkaListenerTls
| Property | Description |
|---|---|
brokerCertChainAndKey |
Reference to the |
B.23. KafkaListenerExternalRoute schema reference
Used in: KafkaListeners
The type property is a discriminator that distinguishes the use of the type KafkaListenerExternalRoute from KafkaListenerExternalLoadBalancer, KafkaListenerExternalNodePort, KafkaListenerExternalIngress.
It must have the value route for the type KafkaListenerExternalRoute.
| Property | Description |
|---|---|
type |
Must be |
string |
|
authentication |
Authentication configuration for Kafka brokers. The type depends on the value of the |
|
|
overrides |
Overrides for external bootstrap and broker services and externally advertised addresses. |
configuration |
External listener configuration. |
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
B.24. RouteListenerOverride schema reference
Used in: KafkaListenerExternalRoute
| Property | Description |
|---|---|
bootstrap |
External bootstrap service configuration. |
brokers |
External broker services configuration. |
B.25. RouteListenerBootstrapOverride schema reference
Used in: RouteListenerOverride
| Property | Description |
|---|---|
address |
Additional address name for the bootstrap service. The address will be added to the list of subject alternative names of the TLS certificates. |
string |
|
host |
Host for the bootstrap route. This field will be used in the |
string |
B.26. RouteListenerBrokerOverride schema reference
Used in: RouteListenerOverride
| Property | Description |
|---|---|
broker |
Id of the kafka broker (broker identifier). |
integer |
|
advertisedHost |
The host name which will be used in the brokers' |
string |
|
advertisedPort |
The port number which will be used in the brokers' |
integer |
|
host |
Host for the broker route. This field will be used in the |
string |
B.27. KafkaListenerExternalConfiguration schema reference
| Property | Description |
|---|---|
brokerCertChainAndKey |
Reference to the |
B.28. KafkaListenerExternalLoadBalancer schema reference
Used in: KafkaListeners
The type property is a discriminator that distinguishes the use of the type KafkaListenerExternalLoadBalancer from KafkaListenerExternalRoute, KafkaListenerExternalNodePort, KafkaListenerExternalIngress.
It must have the value loadbalancer for the type KafkaListenerExternalLoadBalancer.
| Property | Description |
|---|---|
type |
Must be |
string |
|
authentication |
Authentication configuration for Kafka brokers. The type depends on the value of the |
|
|
overrides |
Overrides for external bootstrap and broker services and externally advertised addresses. |
configuration |
External listener configuration. |
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
|
tls |
Enables TLS encryption on the listener. By default set to |
boolean |
B.29. LoadBalancerListenerOverride schema reference
Used in: KafkaListenerExternalLoadBalancer
| Property | Description |
|---|---|
bootstrap |
External bootstrap service configuration. |
brokers |
External broker services configuration. |
B.30. LoadBalancerListenerBootstrapOverride schema reference
Used in: LoadBalancerListenerOverride
| Property | Description |
|---|---|
address |
Additional address name for the bootstrap service. The address will be added to the list of subject alternative names of the TLS certificates. |
string |
|
dnsAnnotations |
Annotations that will be added to the |
map |
|
loadBalancerIP |
The loadbalancer is requested with the IP address specified in this field. This feature depends on whether the underlying cloud provider supports specifying the |
string |
B.31. LoadBalancerListenerBrokerOverride schema reference
Used in: LoadBalancerListenerOverride
| Property | Description |
|---|---|
broker |
Id of the kafka broker (broker identifier). |
integer |
|
advertisedHost |
The host name which will be used in the brokers' |
string |
|
advertisedPort |
The port number which will be used in the brokers' |
integer |
|
dnsAnnotations |
Annotations that will be added to the |
map |
|
loadBalancerIP |
The loadbalancer is requested with the IP address specified in this field. This feature depends on whether the underlying cloud provider supports specifying the |
string |
B.32. KafkaListenerExternalNodePort schema reference
Used in: KafkaListeners
The type property is a discriminator that distinguishes the use of the type KafkaListenerExternalNodePort from KafkaListenerExternalRoute, KafkaListenerExternalLoadBalancer, KafkaListenerExternalIngress.
It must have the value nodeport for the type KafkaListenerExternalNodePort.
| Property | Description |
|---|---|
type |
Must be |
string |
|
authentication |
Authentication configuration for Kafka brokers. The type depends on the value of the |
|
|
overrides |
Overrides for external bootstrap and broker services and externally advertised addresses. |
configuration |
External listener configuration. |
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
|
tls |
Enables TLS encryption on the listener. By default set to |
boolean |
B.33. NodePortListenerOverride schema reference
Used in: KafkaListenerExternalNodePort
| Property | Description |
|---|---|
bootstrap |
External bootstrap service configuration. |
brokers |
External broker services configuration. |
B.34. NodePortListenerBootstrapOverride schema reference
Used in: NodePortListenerOverride
| Property | Description |
|---|---|
address |
Additional address name for the bootstrap service. The address will be added to the list of subject alternative names of the TLS certificates. |
string |
|
dnsAnnotations |
Annotations that will be added to the |
map |
|
nodePort |
Node port for the bootstrap service. |
integer |
B.35. NodePortListenerBrokerOverride schema reference
Used in: NodePortListenerOverride
| Property | Description |
|---|---|
broker |
Id of the kafka broker (broker identifier). |
integer |
|
advertisedHost |
The host name which will be used in the brokers' |
string |
|
advertisedPort |
The port number which will be used in the brokers' |
integer |
|
nodePort |
Node port for the broker service. |
integer |
|
dnsAnnotations |
Annotations that will be added to the |
map |
B.36. NodePortListenerConfiguration schema reference
Used in: KafkaListenerExternalNodePort
| Property | Description |
|---|---|
brokerCertChainAndKey |
Reference to the |
preferredAddressType |
Defines which address type should be used as the node address. Available types are: This field can be used to select the address type which will be used as the preferred type and checked first. In case no address will be found for this address type, the other types will be used in the default order.. |
string (one of [ExternalDNS, ExternalIP, Hostname, InternalIP, InternalDNS]) |
B.37. KafkaListenerExternalIngress schema reference
Used in: KafkaListeners
The type property is a discriminator that distinguishes the use of the type KafkaListenerExternalIngress from KafkaListenerExternalRoute, KafkaListenerExternalLoadBalancer, KafkaListenerExternalNodePort.
It must have the value ingress for the type KafkaListenerExternalIngress.
| Property | Description |
|---|---|
type |
Must be |
string |
|
authentication |
Authentication configuration for Kafka brokers. The type depends on the value of the |
|
|
class |
Configures the |
string |
|
configuration |
External listener configuration. |
networkPolicyPeers |
List of peers which should be able to connect to this listener. Peers in this list are combined using a logical OR operation. If this field is empty or missing, all connections will be allowed for this listener. If this field is present and contains at least one item, the listener only allows the traffic which matches at least one item in this list. See external documentation of networking.k8s.io/v1 networkpolicypeer. |
NetworkPolicyPeer array |
B.38. IngressListenerConfiguration schema reference
Used in: KafkaListenerExternalIngress
| Property | Description |
|---|---|
bootstrap |
External bootstrap ingress configuration. |
brokers |
External broker ingress configuration. |
brokerCertChainAndKey |
Reference to the |
B.39. IngressListenerBootstrapConfiguration schema reference
Used in: IngressListenerConfiguration
| Property | Description |
|---|---|
address |
Additional address name for the bootstrap service. The address will be added to the list of subject alternative names of the TLS certificates. |
string |
|
dnsAnnotations |
Annotations that will be added to the |
map |
|
host |
Host for the bootstrap route. This field will be used in the Ingress resource. |
string |
B.40. IngressListenerBrokerConfiguration schema reference
Used in: IngressListenerConfiguration
| Property | Description |
|---|---|
broker |
Id of the kafka broker (broker identifier). |
integer |
|
advertisedHost |
The host name which will be used in the brokers' |
string |
|
advertisedPort |
The port number which will be used in the brokers' |
integer |
|
host |
Host for the broker ingress. This field will be used in the Ingress resource. |
string |
|
dnsAnnotations |
Annotations that will be added to the |
map |
B.41. KafkaAuthorizationSimple schema reference
Used in: KafkaClusterSpec
Simple authorization in Strimzi uses the AclAuthorizer plugin, the default Access Control Lists (ACLs) authorization plugin provided with Apache Kafka.
ACLs allow you to define which users have access to which resources at a granular level.
Configure the Kafka custom resource to use simple authorization.
Set the type property in the authorization section to the value simple,
and configure a list of super users.
Access rules are configured for the KafkaUser, as described in the ACLRule schema reference.
B.41.1. superUsers
A list of user principals treated as super users, so that they are always allowed without querying ACL rules. For more information see Kafka authorization.
An example of simple authorization configuration
authorization:
type: simple
superUsers:
- CN=client_1
- user_2
- CN=client_3|
Note
|
The super.user configuration option in the config property in Kafka.spec.kafka is ignored.
Designate super users in the authorization property instead.
For more information, see Kafka broker configuration.
|
The type property is a discriminator that distinguishes the use of the type KafkaAuthorizationSimple from KafkaAuthorizationOpa, KafkaAuthorizationKeycloak.
It must have the value simple for the type KafkaAuthorizationSimple.
| Property | Description |
|---|---|
type |
Must be |
string |
|
superUsers |
List of super users. Should contain list of user principals which should get unlimited access rights. |
string array |
B.42. KafkaAuthorizationOpa schema reference
Used in: KafkaClusterSpec
To use Open Policy Agent authorization, set the type property in the authorization section to the value opa,
and configure OPA properties as required.
B.42.1. url
The URL used to connect to the Open Policy Agent server. The URL has to include the policy which will be queried by the authorizer. Required.
B.42.2. allowOnError
Defines whether a Kafka client should be allowed or denied by default when the authorizer fails to query the Open Policy Agent, for example, when it is temporarily unavailable.
Defaults to false - all actions will be denied.
B.42.3. initialCacheCapacity
Initial capacity of the local cache used by the authorizer to avoid querying the Open Policy Agent for every request.
Defaults to 5000.
B.42.4. maximumCacheSize
Maximum capacity of the local cache used by the authorizer to avoid querying the Open Policy Agent for every request.
Defaults to 50000.
B.42.5. expireAfterMs
The expiration of the records kept in the local cache to avoid querying the Open Policy Agent for every request.
Defines how often the cached authorization decisions are reloaded from the Open Policy Agent server.
In milliseconds.
Defaults to 3600000 milliseconds (1 hour).
B.42.6. superUsers
A list of user principals treated as super users, so that they are always allowed without querying the open Policy Agent policy. For more information see Kafka authorization.
An example of Open Policy Agent authorizer configuration
authorization:
type: opa
url: http://opa:8181/v1/data/kafka/allow
allowOnError: false
initialCacheCapacity: 1000
maximumCacheSize: 10000
expireAfterMs: 60000
superUsers:
- CN=fred
- sam
- CN=edwardThe type property is a discriminator that distinguishes the use of the type KafkaAuthorizationOpa from KafkaAuthorizationSimple, KafkaAuthorizationKeycloak.
It must have the value opa for the type KafkaAuthorizationOpa.
| Property | Description |
|---|---|
type |
Must be |
string |
|
url |
The URL used to connect to the Open Policy Agent server. The URL has to include the policy which will be queried by the authorizer. This option is required. |
string |
|
allowOnError |
Defines whether a Kafka client should be allowed or denied by default when the authorizer fails to query the Open Policy Agent, for example, when it is temporarily unavailable). Defaults to |
boolean |
|
initialCacheCapacity |
Initial capacity of the local cache used by the authorizer to avoid querying the Open Policy Agent for every request Defaults to |
integer |
|
maximumCacheSize |
Maximum capacity of the local cache used by the authorizer to avoid querying the Open Policy Agent for every request. Defaults to |
integer |
|
expireAfterMs |
The expiration of the records kept in the local cache to avoid querying the Open Policy Agent for every request. Defines how often the cached authorization decisions are reloaded from the Open Policy Agent server. In milliseconds. Defaults to |
integer |
|
superUsers |
List of super users, which is specifically a list of user principals that have unlimited access rights. |
string array |
B.43. KafkaAuthorizationKeycloak schema reference
Used in: KafkaClusterSpec
The type property is a discriminator that distinguishes the use of the type KafkaAuthorizationKeycloak from KafkaAuthorizationSimple, KafkaAuthorizationOpa.
It must have the value keycloak for the type KafkaAuthorizationKeycloak.
| Property | Description |
|---|---|
type |
Must be |
string |
|
clientId |
OAuth Client ID which the Kafka client can use to authenticate against the OAuth server and use the token endpoint URI. |
string |
|
tokenEndpointUri |
Authorization server token endpoint URI. |
string |
|
tlsTrustedCertificates |
Trusted certificates for TLS connection to the OAuth server. |
|
|
disableTlsHostnameVerification |
Enable or disable TLS hostname verification. Default value is |
boolean |
|
delegateToKafkaAcls |
Whether authorization decision should be delegated to the 'Simple' authorizer if DENIED by Keycloak Authorization Services policies. Default value is |
boolean |
|
grantsRefreshPeriodSeconds |
The time between two consecutive grants refresh runs in seconds. The default value is 60. |
integer |
|
grantsRefreshPoolSize |
The number of threads to use to refresh grants for active sessions. The more threads, the more parallelism, so the sooner the job completes. However, using more threads places a heavier load on the authorization server. The default value is 5. |
integer |
|
superUsers |
List of super users. Should contain list of user principals which should get unlimited access rights. |
string array |
B.44. Rack schema reference
Used in: KafkaClusterSpec, KafkaConnectS2ISpec, KafkaConnectSpec
| Property | Description |
|---|---|
topologyKey |
A key that matches labels assigned to the Kubernetes cluster nodes. The value of the label is used to set the broker’s |
string |
B.45. Probe schema reference
Used in: CruiseControlSpec, EntityTopicOperatorSpec, EntityUserOperatorSpec, KafkaBridgeSpec, KafkaClusterSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaExporterSpec, KafkaMirrorMaker2Spec, KafkaMirrorMakerSpec, TlsSidecar, TopicOperatorSpec, ZookeeperClusterSpec
| Property | Description |
|---|---|
failureThreshold |
Minimum consecutive failures for the probe to be considered failed after having succeeded. Defaults to 3. Minimum value is 1. |
integer |
|
initialDelaySeconds |
The initial delay before first the health is first checked. |
integer |
|
periodSeconds |
How often (in seconds) to perform the probe. Default to 10 seconds. Minimum value is 1. |
integer |
|
successThreshold |
Minimum consecutive successes for the probe to be considered successful after having failed. Defaults to 1. Must be 1 for liveness. Minimum value is 1. |
integer |
|
timeoutSeconds |
The timeout for each attempted health check. |
integer |
B.46. JvmOptions schema reference
Used in: CruiseControlSpec, EntityTopicOperatorSpec, EntityUserOperatorSpec, KafkaBridgeSpec, KafkaClusterSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2Spec, KafkaMirrorMakerSpec, TopicOperatorSpec, ZookeeperClusterSpec
| Property | Description |
|---|---|
-XX |
A map of -XX options to the JVM. |
map |
|
-Xms |
-Xms option to to the JVM. |
string |
|
-Xmx |
-Xmx option to to the JVM. |
string |
|
gcLoggingEnabled |
Specifies whether the Garbage Collection logging is enabled. The default is false. |
boolean |
|
javaSystemProperties |
A map of additional system properties which will be passed using the |
|
B.47. SystemProperty schema reference
Used in: JvmOptions
| Property | Description |
|---|---|
name |
The system property name. |
string |
|
value |
The system property value. |
string |
B.48. KafkaJmxOptions schema reference
Used in: KafkaClusterSpec
| Property | Description |
|---|---|
authentication |
Authentication configuration for connecting to the Kafka JMX port. The type depends on the value of the |
B.49. KafkaJmxAuthenticationPassword schema reference
Used in: KafkaJmxOptions
The type property is a discriminator that distinguishes the use of the type KafkaJmxAuthenticationPassword from other subtypes which may be added in the future.
It must have the value password for the type KafkaJmxAuthenticationPassword.
| Property | Description |
|---|---|
type |
Must be |
string |
B.50. InlineLogging schema reference
Used in: CruiseControlSpec, EntityTopicOperatorSpec, EntityUserOperatorSpec, KafkaBridgeSpec, KafkaClusterSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2Spec, KafkaMirrorMakerSpec, TopicOperatorSpec, ZookeeperClusterSpec
The type property is a discriminator that distinguishes the use of the type InlineLogging from ExternalLogging.
It must have the value inline for the type InlineLogging.
| Property | Description |
|---|---|
type |
Must be |
string |
|
loggers |
A Map from logger name to logger level. |
map |
B.51. ExternalLogging schema reference
Used in: CruiseControlSpec, EntityTopicOperatorSpec, EntityUserOperatorSpec, KafkaBridgeSpec, KafkaClusterSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2Spec, KafkaMirrorMakerSpec, TopicOperatorSpec, ZookeeperClusterSpec
The type property is a discriminator that distinguishes the use of the type ExternalLogging from InlineLogging.
It must have the value external for the type ExternalLogging.
| Property | Description |
|---|---|
type |
Must be |
string |
|
name |
The name of the |
string |
B.52. TlsSidecar schema reference
Used in: CruiseControlSpec, EntityOperatorSpec, KafkaClusterSpec, TopicOperatorSpec, ZookeeperClusterSpec
| Property | Description |
|---|---|
image |
The docker image for the container. |
string |
|
livenessProbe |
Pod liveness checking. |
logLevel |
The log level for the TLS sidecar. Default value is |
string (one of [emerg, debug, crit, err, alert, warning, notice, info]) |
|
readinessProbe |
Pod readiness checking. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
B.53. KafkaClusterTemplate schema reference
Used in: KafkaClusterSpec
| Property | Description |
|---|---|
statefulset |
Template for Kafka |
pod |
Template for Kafka |
bootstrapService |
Template for Kafka bootstrap |
brokersService |
Template for Kafka broker |
externalBootstrapService |
Template for Kafka external bootstrap |
perPodService |
Template for Kafka per-pod |
externalBootstrapRoute |
Template for Kafka external bootstrap |
perPodRoute |
Template for Kafka per-pod |
externalBootstrapIngress |
Template for Kafka external bootstrap |
perPodIngress |
Template for Kafka per-pod |
persistentVolumeClaim |
Template for all Kafka |
podDisruptionBudget |
Template for Kafka |
kafkaContainer |
Template for the Kafka broker container. |
tlsSidecarContainer |
The property |
initContainer |
Template for the Kafka init container. |
B.54. StatefulSetTemplate schema reference
Used in: KafkaClusterTemplate, ZookeeperClusterTemplate
| Property | Description |
|---|---|
metadata |
Metadata applied to the resource. |
podManagementPolicy |
PodManagementPolicy which will be used for this StatefulSet. Valid values are |
string (one of [OrderedReady, Parallel]) |
B.55. MetadataTemplate schema reference
Used in: ExternalServiceTemplate, PodDisruptionBudgetTemplate, PodTemplate, ResourceTemplate, StatefulSetTemplate
Labels and Annotations are used to identify and organize resources, and are configured in the metadata property.
For example:
# ...
template:
statefulset:
metadata:
labels:
label1: value1
label2: value2
annotations:
annotation1: value1
annotation2: value2
# ...The labels and annotations fields can contain any labels or annotations that do not contain the reserved string strimzi.io.
Labels and annotations containing strimzi.io are used internally by Strimzi and cannot be configured.
| Property | Description |
|---|---|
labels |
Labels added to the resource template. Can be applied to different resources such as |
map |
|
annotations |
Annotations added to the resource template. Can be applied to different resources such as |
map |
B.56. PodTemplate schema reference
Used in: CruiseControlTemplate, EntityOperatorTemplate, JmxTransTemplate, KafkaBridgeTemplate, KafkaClusterTemplate, KafkaConnectTemplate, KafkaExporterTemplate, KafkaMirrorMakerTemplate, ZookeeperClusterTemplate
An example showing the
PodTemplate# ...
template:
pod:
metadata:
labels:
label1: value1
annotations:
anno1: value1
imagePullSecrets:
- name: my-docker-credentials
securityContext:
runAsUser: 1000001
fsGroup: 0
terminationGracePeriodSeconds: 120
# ...| Property | Description |
|---|---|
metadata |
Metadata applied to the resource. |
imagePullSecrets |
List of references to secrets in the same namespace to use for pulling any of the images used by this Pod. When the |
LocalObjectReference array |
|
securityContext |
Configures pod-level security attributes and common container settings. See external documentation of core/v1 podsecuritycontext. |
terminationGracePeriodSeconds |
The grace period is the duration in seconds after the processes running in the pod are sent a termination signal, and the time when the processes are forcibly halted with a kill signal. Set this value to longer than the expected cleanup time for your process. Value must be a non-negative integer. A zero value indicates delete immediately. You might need to increase the grace period for very large Kafka clusters, so that the Kafka brokers have enough time to transfer their work to another broker before they are terminated. Defaults to 30 seconds. |
integer |
|
affinity |
The pod’s affinity rules. See external documentation of core/v1 affinity. |
tolerations |
The pod’s tolerations. See external documentation of core/v1 toleration. |
Toleration array |
|
priorityClassName |
The name of the priority class used to assign priority to the pods. For more information about priority classes, see Pod Priority and Preemption. |
string |
|
schedulerName |
The name of the scheduler used to dispatch this |
string |
|
hostAliases |
The pod’s HostAliases. HostAliases is an optional list of hosts and IPs that will be injected into the pod’s hosts file if specified. See external documentation of core/v1 HostAlias. |
HostAlias array |
B.57. ResourceTemplate schema reference
Used in: CruiseControlTemplate, EntityOperatorTemplate, JmxTransTemplate, KafkaBridgeTemplate, KafkaClusterTemplate, KafkaConnectTemplate, KafkaExporterTemplate, KafkaMirrorMakerTemplate, KafkaUserTemplate, ZookeeperClusterTemplate
| Property | Description |
|---|---|
metadata |
Metadata applied to the resource. |
B.58. ExternalServiceTemplate schema reference
Used in: KafkaClusterTemplate
When exposing Kafka outside of Kubernetes using loadbalancers or node ports, you can use properties, in addition to labels and annotations, to customize how a Service is created.
An example showing customized external services
# ...
template:
externalBootstrapService:
externalTrafficPolicy: Local
loadBalancerSourceRanges:
- 10.0.0.0/8
- 88.208.76.87/32
perPodService:
externalTrafficPolicy: Local
loadBalancerSourceRanges:
- 10.0.0.0/8
- 88.208.76.87/32
# ...| Property | Description |
|---|---|
metadata |
Metadata applied to the resource. |
externalTrafficPolicy |
The property |
string (one of [Local, Cluster]) |
|
loadBalancerSourceRanges |
The property |
string array |
B.59. PodDisruptionBudgetTemplate schema reference
Used in: CruiseControlTemplate, KafkaBridgeTemplate, KafkaClusterTemplate, KafkaConnectTemplate, KafkaMirrorMakerTemplate, ZookeeperClusterTemplate
Strimzi creates a PodDisruptionBudget for every new StatefulSet or Deployment.
By default, pod disruption budgets only allow a single pod to be unavailable at a given time.
You can increase the amount of unavailable pods allowed by changing the default value of the maxUnavailable property in the PodDisruptionBudget.spec resource.
An example of
PodDisruptionBudget template# ...
template:
podDisruptionBudget:
metadata:
labels:
key1: label1
key2: label2
annotations:
key1: label1
key2: label2
maxUnavailable: 1
# ...| Property | Description |
|---|---|
metadata |
Metadata to apply to the |
maxUnavailable |
Maximum number of unavailable pods to allow automatic Pod eviction. A Pod eviction is allowed when the |
integer |
B.60. ContainerTemplate schema reference
Used in: CruiseControlTemplate, EntityOperatorTemplate, JmxTransTemplate, KafkaBridgeTemplate, KafkaClusterTemplate, KafkaConnectTemplate, KafkaExporterTemplate, KafkaMirrorMakerTemplate, ZookeeperClusterTemplate
You can set custom security context and environment variables for a container.
The environment variables are defined under the env property as a list of objects with name and value fields.
The following example shows two custom environment variables and a custom security context set for the Kafka broker containers:
# ...
template:
kafkaContainer:
env:
- name: EXAMPLE_ENV_1
value: example.env.one
- name: EXAMPLE_ENV_2
value: example.env.two
securityContext:
runAsUser: 2000
# ...Environment variables prefixed with KAFKA_ are internal to Strimzi and should be avoided.
If you set a custom environment variable that is already in use by Strimzi, it is ignored and a warning is recorded in the log.
| Property | Description |
|---|---|
env |
Environment variables which should be applied to the container. |
|
|
securityContext |
Security context for the container. See external documentation of core/v1 securitycontext. |
B.61. ContainerEnvVar schema reference
Used in: ContainerTemplate
| Property | Description |
|---|---|
name |
The environment variable key. |
string |
|
value |
The environment variable value. |
string |
B.62. ZookeeperClusterSpec schema reference
Used in: KafkaSpec
| Property | Description |
|---|---|
replicas |
The number of pods in the cluster. |
integer |
|
image |
The docker image for the pods. |
string |
|
storage |
Storage configuration (disk). Cannot be updated. The type depends on the value of the |
config |
The ZooKeeper broker config. Properties with the following prefixes cannot be set: server., dataDir, dataLogDir, clientPort, authProvider, quorum.auth, requireClientAuthScheme, snapshot.trust.empty, standaloneEnabled, reconfigEnabled, 4lw.commands.whitelist, secureClientPort, ssl., serverCnxnFactory, sslQuorum (with the exception of: ssl.protocol, ssl.quorum.protocol, ssl.enabledProtocols, ssl.quorum.enabledProtocols, ssl.ciphersuites, ssl.quorum.ciphersuites, ssl.hostnameVerification, ssl.quorum.hostnameVerification). |
map |
|
affinity |
The property |
tolerations |
The property |
Toleration array |
|
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
jvmOptions |
JVM Options for pods. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
metrics |
The Prometheus JMX Exporter configuration. See https://github.com/prometheus/jmx_exporter for details of the structure of this configuration. |
map |
|
logging |
Logging configuration for ZooKeeper. The type depends on the value of the |
template |
Template for ZooKeeper cluster resources. The template allows users to specify how are the |
tlsSidecar |
The property |
B.63. ZookeeperClusterTemplate schema reference
Used in: ZookeeperClusterSpec
| Property | Description |
|---|---|
statefulset |
Template for ZooKeeper |
pod |
Template for ZooKeeper |
clientService |
Template for ZooKeeper client |
nodesService |
Template for ZooKeeper nodes |
persistentVolumeClaim |
Template for all ZooKeeper |
podDisruptionBudget |
Template for ZooKeeper |
zookeeperContainer |
Template for the ZooKeeper container. |
tlsSidecarContainer |
The property |
B.64. TopicOperatorSpec schema reference
The type TopicOperatorSpec has been deprecated.
Please use EntityTopicOperatorSpec instead.
Used in: KafkaSpec
| Property | Description |
|---|---|
watchedNamespace |
The namespace the Topic Operator should watch. |
string |
|
image |
The image to use for the Topic Operator. |
string |
|
reconciliationIntervalSeconds |
Interval between periodic reconciliations. |
integer |
|
zookeeperSessionTimeoutSeconds |
Timeout for the ZooKeeper session. |
integer |
|
affinity |
Pod affinity rules. See external documentation of core/v1 affinity. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
topicMetadataMaxAttempts |
The number of attempts at getting topic metadata. |
integer |
|
tlsSidecar |
TLS sidecar configuration. |
logging |
Logging configuration. The type depends on the value of the |
jvmOptions |
JVM Options for pods. |
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
B.65. EntityOperatorSpec schema reference
Used in: KafkaSpec
| Property | Description |
|---|---|
topicOperator |
Configuration of the Topic Operator. |
userOperator |
Configuration of the User Operator. |
affinity |
The property |
tolerations |
The property |
Toleration array |
|
tlsSidecar |
TLS sidecar configuration. |
template |
Template for Entity Operator resources. The template allows users to specify how is the |
B.66. EntityTopicOperatorSpec schema reference
Used in: EntityOperatorSpec
| Property | Description |
|---|---|
watchedNamespace |
The namespace the Topic Operator should watch. |
string |
|
image |
The image to use for the Topic Operator. |
string |
|
reconciliationIntervalSeconds |
Interval between periodic reconciliations. |
integer |
|
zookeeperSessionTimeoutSeconds |
Timeout for the ZooKeeper session. |
integer |
|
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
topicMetadataMaxAttempts |
The number of attempts at getting topic metadata. |
integer |
|
logging |
Logging configuration. The type depends on the value of the |
jvmOptions |
JVM Options for pods. |
B.67. EntityUserOperatorSpec schema reference
Used in: EntityOperatorSpec
| Property | Description |
|---|---|
watchedNamespace |
The namespace the User Operator should watch. |
string |
|
image |
The image to use for the User Operator. |
string |
|
reconciliationIntervalSeconds |
Interval between periodic reconciliations. |
integer |
|
zookeeperSessionTimeoutSeconds |
Timeout for the ZooKeeper session. |
integer |
|
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
logging |
Logging configuration. The type depends on the value of the |
jvmOptions |
JVM Options for pods. |
B.68. EntityOperatorTemplate schema reference
Used in: EntityOperatorSpec
| Property | Description |
|---|---|
deployment |
Template for Entity Operator |
pod |
Template for Entity Operator |
tlsSidecarContainer |
Template for the Entity Operator TLS sidecar container. |
topicOperatorContainer |
Template for the Entity Topic Operator container. |
userOperatorContainer |
Template for the Entity User Operator container. |
B.69. CertificateAuthority schema reference
Used in: KafkaSpec
Configuration of how TLS certificates are used within the cluster. This applies to certificates used for both internal communication within the cluster and to certificates used for client access via Kafka.spec.kafka.listeners.tls.
| Property | Description |
|---|---|
generateCertificateAuthority |
If true then Certificate Authority certificates will be generated automatically. Otherwise the user will need to provide a Secret with the CA certificate. Default is true. |
boolean |
|
validityDays |
The number of days generated certificates should be valid for. The default is 365. |
integer |
|
renewalDays |
The number of days in the certificate renewal period. This is the number of days before the a certificate expires during which renewal actions may be performed. When |
integer |
|
certificateExpirationPolicy |
How should CA certificate expiration be handled when |
string (one of [replace-key, renew-certificate]) |
B.70. CruiseControlSpec schema reference
Used in: KafkaSpec
| Property | Description |
|---|---|
image |
The docker image for the pods. |
string |
|
tlsSidecar |
TLS sidecar configuration. |
resources |
CPU and memory resources to reserve for the Cruise Control container. See external documentation of core/v1 resourcerequirements. |
livenessProbe |
Pod liveness checking for the Cruise Control container. |
readinessProbe |
Pod readiness checking for the Cruise Control container. |
jvmOptions |
JVM Options for the Cruise Control container. |
logging |
Logging configuration (log4j1) for Cruise Control. The type depends on the value of the |
template |
Template to specify how Cruise Control resources, |
brokerCapacity |
The Cruise Control |
config |
The Cruise Control configuration. For a full list of configuration options refer to https://github.com/linkedin/cruise-control/wiki/Configurations. Note that properties with the following prefixes cannot be set: bootstrap.servers, client.id, zookeeper., network., security., failed.brokers.zk.path,webserver.http., webserver.api.urlprefix, webserver.session.path, webserver.accesslog., two.step., request.reason.required,metric.reporter.sampler.bootstrap.servers, metric.reporter.topic, partition.metric.sample.store.topic, broker.metric.sample.store.topic,capacity.config.file, self.healing., anomaly.detection., ssl. |
map |
|
metrics |
The Prometheus JMX Exporter configuration. See https://github.com/prometheus/jmx_exporter for details of the structure of this configuration. |
map |
B.71. CruiseControlTemplate schema reference
Used in: CruiseControlSpec
| Property | Description |
|---|---|
deployment |
Template for Cruise Control |
pod |
Template for Cruise Control |
apiService |
Template for Cruise Control API |
podDisruptionBudget |
Template for Cruise Control |
cruiseControlContainer |
Template for the Cruise Control container. |
tlsSidecarContainer |
Template for the Cruise Control TLS sidecar container. |
B.72. BrokerCapacity schema reference
Used in: CruiseControlSpec
| Property | Description |
|---|---|
disk |
Broker capacity for disk in bytes, for example, 100Gi. |
string |
|
cpuUtilization |
Broker capacity for CPU resource utilization as a percentage (0 - 100). |
integer |
|
inboundNetwork |
Broker capacity for inbound network throughput in bytes per second, for example, 10000KB/s. |
string |
|
outboundNetwork |
Broker capacity for outbound network throughput in bytes per second, for example 10000KB/s. |
string |
B.73. JmxTransSpec schema reference
Used in: KafkaSpec
| Property | Description |
|---|---|
image |
The image to use for the JmxTrans. |
string |
|
outputDefinitions |
Defines the output hosts that will be referenced later on. For more information on these properties see, |
logLevel |
Sets the logging level of the JmxTrans deployment.For more information see, JmxTrans Logging Level. |
string |
|
kafkaQueries |
Queries to send to the Kafka brokers to define what data should be read from each broker. For more information on these properties see, |
|
|
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
template |
Template for JmxTrans resources. |
B.74. JmxTransOutputDefinitionTemplate schema reference
Used in: JmxTransSpec
| Property | Description |
|---|---|
outputType |
Template for setting the format of the data that will be pushed.For more information see JmxTrans OutputWriters. |
string |
|
host |
The DNS/hostname of the remote host that the data is pushed to. |
string |
|
port |
The port of the remote host that the data is pushed to. |
integer |
|
flushDelayInSeconds |
How many seconds the JmxTrans waits before pushing a new set of data out. |
integer |
|
typeNames |
Template for filtering data to be included in response to a wildcard query. For more information see JmxTrans queries. |
string array |
|
name |
Template for setting the name of the output definition. This is used to identify where to send the results of queries should be sent. |
string |
B.75. JmxTransQueryTemplate schema reference
Used in: JmxTransSpec
| Property | Description |
|---|---|
targetMBean |
If using wildcards instead of a specific MBean then the data is gathered from multiple MBeans. Otherwise if specifying an MBean then data is gathered from that specified MBean. |
string |
|
attributes |
Determine which attributes of the targeted MBean should be included. |
string array |
|
outputs |
List of the names of output definitions specified in the spec.kafka.jmxTrans.outputDefinitions that have defined where JMX metrics are pushed to, and in which data format. |
string array |
B.76. JmxTransTemplate schema reference
Used in: JmxTransSpec
| Property | Description |
|---|---|
deployment |
Template for JmxTrans |
pod |
Template for JmxTrans |
container |
Template for JmxTrans container. |
B.77. KafkaExporterSpec schema reference
Used in: KafkaSpec
| Property | Description |
|---|---|
image |
The docker image for the pods. |
string |
|
groupRegex |
Regular expression to specify which consumer groups to collect. Default value is |
string |
|
topicRegex |
Regular expression to specify which topics to collect. Default value is |
string |
|
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
logging |
Only log messages with the given severity or above. Valid levels: [ |
string |
|
enableSaramaLogging |
Enable Sarama logging, a Go client library used by the Kafka Exporter. |
boolean |
|
template |
Customization of deployment templates and pods. |
livenessProbe |
Pod liveness check. |
readinessProbe |
Pod readiness check. |
B.78. KafkaExporterTemplate schema reference
Used in: KafkaExporterSpec
| Property | Description |
|---|---|
deployment |
Template for Kafka Exporter |
pod |
Template for Kafka Exporter |
service |
Template for Kafka Exporter |
container |
Template for the Kafka Exporter container. |
B.79. KafkaStatus schema reference
Used in: Kafka
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
listeners |
Addresses of the internal and external listeners. |
|
B.80. Condition schema reference
Used in: KafkaBridgeStatus, KafkaConnectorStatus, KafkaConnectS2IStatus, KafkaConnectStatus, KafkaMirrorMaker2Status, KafkaMirrorMakerStatus, KafkaRebalanceStatus, KafkaStatus, KafkaTopicStatus, KafkaUserStatus
| Property | Description |
|---|---|
type |
The unique identifier of a condition, used to distinguish between other conditions in the resource. |
string |
|
status |
The status of the condition, either True, False or Unknown. |
string |
|
lastTransitionTime |
Last time the condition of a type changed from one status to another. The required format is 'yyyy-MM-ddTHH:mm:ssZ', in the UTC time zone. |
string |
|
reason |
The reason for the condition’s last transition (a single word in CamelCase). |
string |
|
message |
Human-readable message indicating details about the condition’s last transition. |
string |
B.81. ListenerStatus schema reference
Used in: KafkaStatus
| Property | Description |
|---|---|
type |
The type of the listener. Can be one of the following three types: |
string |
|
addresses |
A list of the addresses for this listener. |
|
|
bootstrapServers |
A comma-separated list of |
string |
|
certificates |
A list of TLS certificates which can be used to verify the identity of the server when connecting to the given listener. Set only for |
string array |
B.82. ListenerAddress schema reference
Used in: ListenerStatus
| Property | Description |
|---|---|
host |
The DNS name or IP address of the Kafka bootstrap service. |
string |
|
port |
The port of the Kafka bootstrap service. |
integer |
B.83. KafkaConnect schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka Connect cluster. |
status |
The status of the Kafka Connect cluster. |
B.84. KafkaConnectSpec schema reference
Used in: KafkaConnect
Configures a Kafka Connect cluster.
B.84.1. config
Use the config properties to configure Kafka options as keys.
Standard Apache Kafka Connect configuration may be provided, restricted to those properties not managed directly by Strimzi.
Configuration options that cannot be configured relate to:
-
Kafka cluster bootstrap address
-
Security (Encryption, Authentication, and Authorization)
-
Listener / REST interface configuration
-
Plugin path configuration
The values can be one of the following JSON types:
-
String
-
Number
-
Boolean
You can specify and configure the options listed in the Apache Kafka documentation with the exception of those options that are managed directly by Strimzi. Specifically, configuration options with keys equal to or starting with one of the following strings are forbidden:
-
ssl. -
sasl. -
security. -
listeners -
plugin.path -
rest. -
bootstrap.servers
When a forbidden option is present in the config property, it is ignored and a warning message is printed to the Cluster Operator log file.
All other options are passed to Kafka Connect.
|
Important
|
The Cluster Operator does not validate keys or values in the config object provided.
When an invalid configuration is provided, the Kafka Connect cluster might not start or might become unstable.
In this circumstance, fix the configuration in the KafkaConnect.spec.config or KafkaConnectS2I.spec.config object, then the Cluster Operator can roll out the new configuration to all Kafka Connect nodes.
|
Certain options have default values:
-
group.idwith default valueconnect-cluster -
offset.storage.topicwith default valueconnect-cluster-offsets -
config.storage.topicwith default valueconnect-cluster-configs -
status.storage.topicwith default valueconnect-cluster-status -
key.converterwith default valueorg.apache.kafka.connect.json.JsonConverter -
value.converterwith default valueorg.apache.kafka.connect.json.JsonConverter
These options are automatically configured in case they are not present in the KafkaConnect.spec.config or KafkaConnectS2I.spec.config properties.
There are exceptions to the forbidden options.
You can use three allowed ssl configuration options for client connection using a specific cipher suite for a TLS version.
A cipher suite combines algorithms for secure connection and data transfer.
You can also configure the ssl.endpoint.identification.algorithm property to enable or disable hostname verification.
Example Kafka Connect configuration
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
metadata:
name: my-connect
spec:
# ...
config:
group.id: my-connect-cluster
offset.storage.topic: my-connect-cluster-offsets
config.storage.topic: my-connect-cluster-configs
status.storage.topic: my-connect-cluster-status
key.converter: org.apache.kafka.connect.json.JsonConverter
value.converter: org.apache.kafka.connect.json.JsonConverter
key.converter.schemas.enable: true
value.converter.schemas.enable: true
config.storage.replication.factor: 3
offset.storage.replication.factor: 3
status.storage.replication.factor: 3
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384"
ssl.enabled.protocols: "TLSv1.2"
ssl.protocol: "TLSv1.2"
ssl.endpoint.identification.algorithm: HTTPS
# ...For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
You can also configure the ssl.endpoint.identification.algorithm property to enable or disable hostname verification.
B.84.2. logging
Kafka Connect (and Kafka Connect with Source2Image support) has its own configurable loggers:
-
connect.root.logger.level -
log4j.logger.org.reflections
Further loggers are added depending on the Kafka Connect plugins running.
Use a curl request to get a complete list of Kafka Connect loggers running from any Kafka broker pod:
curl -s http://<connect-cluster-name>-connect-api:8083/admin/loggers/Kafka Connect uses the Apache log4j logger implementation.
Use the logging property to configure loggers and logger levels.
You can set the log levels by specifying the logger and level directly (inline) or use a custom (external) ConfigMap.
If a ConfigMap is used, you set logging.name property to the name of the ConfigMap containing the external logging configuration. Inside the ConfigMap, the logging configuration is described using log4j.properties.
For more information about log levels, see Apache logging services.
Here we see examples of inline and external logging.
Inline logging
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
spec:
# ...
logging:
type: inline
loggers:
connect.root.logger.level: "INFO"
# ...External logging
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
spec:
# ...
logging:
type: external
name: customConfigMap
# ...Any available loggers that are not configured have their level set to OFF.
If Kafka Connect was deployed using the Cluster Operator, changes to Kafka Connect logging levels are applied dynamically.
If you use external logging, a rolling update is triggered when logging appenders are changed.
Garbage collector (GC)
Garbage collector logging can also be enabled (or disabled) using the jvmOptions property.
| Property | Description |
|---|---|
replicas |
The number of pods in the Kafka Connect group. |
integer |
|
version |
The Kafka Connect version. Defaults to 2.6.0. Consult the user documentation to understand the process required to upgrade or downgrade the version. |
string |
|
image |
The docker image for the pods. |
string |
|
bootstrapServers |
Bootstrap servers to connect to. This should be given as a comma separated list of <hostname>:<port> pairs. |
string |
|
tls |
TLS configuration. |
authentication |
Authentication configuration for Kafka Connect. The type depends on the value of the |
|
|
config |
The Kafka Connect configuration. Properties with the following prefixes cannot be set: ssl., sasl., security., listeners, plugin.path, rest., bootstrap.servers, consumer.interceptor.classes, producer.interceptor.classes (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
|
resources |
The maximum limits for CPU and memory resources and the requested initial resources. See external documentation of core/v1 resourcerequirements. |
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
jvmOptions |
JVM Options for pods. |
affinity |
The property |
tolerations |
The property |
Toleration array |
|
logging |
Logging configuration for Kafka Connect. The type depends on the value of the |
metrics |
The Prometheus JMX Exporter configuration. See https://github.com/prometheus/jmx_exporter for details of the structure of this configuration. |
map |
|
tracing |
The configuration of tracing in Kafka Connect. The type depends on the value of the |
template |
Template for Kafka Connect and Kafka Connect S2I resources. The template allows users to specify how the |
externalConfiguration |
Pass data from Secrets or ConfigMaps to the Kafka Connect pods and use them to configure connectors. |
clientRackInitImage |
The image of the init container used for initializing the |
string |
|
rack |
Configuration of the node label which will be used as the client.rack consumer configuration. |
B.85. KafkaConnectTls schema reference
Used in: KafkaConnectS2ISpec, KafkaConnectSpec
Configures TLS trusted certificates for connecting Kafka Connect to the cluster.
B.85.1. trustedCertificates
Provide a list of secrets using the trustedCertificates property.
| Property | Description |
|---|---|
trustedCertificates |
Trusted certificates for TLS connection. |
|
B.86. KafkaClientAuthenticationTls schema reference
Used in: KafkaBridgeSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2ClusterSpec, KafkaMirrorMakerConsumerSpec, KafkaMirrorMakerProducerSpec
To use TLS client authentication, set the type property to the value tls.
TLS client authentication uses a TLS certificate to authenticate.
B.86.1. certificateAndKey
The certificate is specified in the certificateAndKey property and is always loaded from a Kubernetes secret.
In the secret, the certificate must be stored in X509 format under two different keys: public and private.
You can use the secrets created by the User Operator,
or you can create your own TLS certificate file, with the keys used for authentication, then create a Secret from the file:
kubectl create secret generic MY-SECRET \
--from-file=MY-PUBLIC-TLS-CERTIFICATE-FILE.crt \
--from-file=MY-PRIVATE.key|
Note
|
TLS client authentication can only be used with TLS connections. |
Example TLS client authentication configuration
authentication:
type: tls
certificateAndKey:
secretName: my-secret
certificate: my-public-tls-certificate-file.crt
key: private.keyThe type property is a discriminator that distinguishes the use of the type KafkaClientAuthenticationTls from KafkaClientAuthenticationScramSha512, KafkaClientAuthenticationPlain, KafkaClientAuthenticationOAuth.
It must have the value tls for the type KafkaClientAuthenticationTls.
| Property | Description |
|---|---|
certificateAndKey |
Reference to the |
type |
Must be |
string |
B.87. KafkaClientAuthenticationScramSha512 schema reference
Used in: KafkaBridgeSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2ClusterSpec, KafkaMirrorMakerConsumerSpec, KafkaMirrorMakerProducerSpec
To configure SASL-based SCRAM-SHA-512 authentication, set the type property to scram-sha-512.
The SCRAM-SHA-512 authentication mechanism requires a username and password.
B.87.1. username
Specify the username in the username property.
B.87.2. passwordSecret
In the passwordSecret property, specify a link to a Secret containing the password.
You can use the secrets created by the User Operator.
If required, you can create a text file that contains the password, in cleartext, to use for authentication:
echo -n PASSWORD > MY-PASSWORD.txtYou can then create a Secret from the text file, setting your own field name (key) for the password:
kubectl create secret generic MY-CONNECT-SECRET-NAME --from-file=MY-PASSWORD-FIELD-NAME=./MY-PASSWORD.txtExample Secret for SCRAM-SHA-512 client authentication for Kafka Connect
apiVersion: v1
kind: Secret
metadata:
name: my-connect-secret-name
type: Opaque
data:
my-connect-password-field: LFTIyFRFlMmU2N2TmThe secretName property contains the name of the Secret, and the password property contains the name of the key under which the password is stored inside the Secret.
|
Important
|
Do not specify the actual password in the password property.
|
Example SASL-based SCRAM-SHA-512 client authentication configuration for Kafka Connect
authentication:
type: scram-sha-512
username: my-connect-username
passwordSecret:
secretName: my-connect-secret-name
password: my-connect-password-fieldThe type property is a discriminator that distinguishes the use of the type KafkaClientAuthenticationScramSha512 from KafkaClientAuthenticationTls, KafkaClientAuthenticationPlain, KafkaClientAuthenticationOAuth.
It must have the value scram-sha-512 for the type KafkaClientAuthenticationScramSha512.
| Property | Description |
|---|---|
passwordSecret |
Reference to the |
type |
Must be |
string |
|
username |
Username used for the authentication. |
string |
B.88. PasswordSecretSource schema reference
| Property | Description |
|---|---|
password |
The name of the key in the Secret under which the password is stored. |
string |
|
secretName |
The name of the Secret containing the password. |
string |
B.89. KafkaClientAuthenticationPlain schema reference
Used in: KafkaBridgeSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2ClusterSpec, KafkaMirrorMakerConsumerSpec, KafkaMirrorMakerProducerSpec
To configure SASL-based PLAIN authentication, set the type property to plain.
SASL PLAIN authentication mechanism requires a username and password.
|
Warning
|
The SASL PLAIN mechanism will transfer the username and password across the network in cleartext. Only use SASL PLAIN authentication if TLS encryption is enabled. |
B.89.1. username
Specify the username in the username property.
B.89.2. passwordSecret
In the passwordSecret property, specify a link to a Secret containing the password.
You can use the secrets created by the User Operator.
If required, create a text file that contains the password, in cleartext, to use for authentication:
echo -n PASSWORD > MY-PASSWORD.txtYou can then create a Secret from the text file, setting your own field name (key) for the password:
kubectl create secret generic MY-CONNECT-SECRET-NAME --from-file=MY-PASSWORD-FIELD-NAME=./MY-PASSWORD.txtExample Secret for PLAIN client authentication for Kafka Connect
apiVersion: v1
kind: Secret
metadata:
name: my-connect-secret-name
type: Opaque
data:
my-password-field-name: LFTIyFRFlMmU2N2TmThe secretName property contains the name of the Secret and the password property contains the name of the key under which the password is stored inside the Secret.
|
Important
|
Do not specify the actual password in the password property.
|
An example SASL based PLAIN client authentication configuration
authentication:
type: plain
username: my-connect-username
passwordSecret:
secretName: my-connect-secret-name
password: my-password-field-nameThe type property is a discriminator that distinguishes the use of the type KafkaClientAuthenticationPlain from KafkaClientAuthenticationTls, KafkaClientAuthenticationScramSha512, KafkaClientAuthenticationOAuth.
It must have the value plain for the type KafkaClientAuthenticationPlain.
| Property | Description |
|---|---|
passwordSecret |
Reference to the |
type |
Must be |
string |
|
username |
Username used for the authentication. |
string |
B.90. KafkaClientAuthenticationOAuth schema reference
Used in: KafkaBridgeSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2ClusterSpec, KafkaMirrorMakerConsumerSpec, KafkaMirrorMakerProducerSpec
To use OAuth client authentication, set the type property to the value oauth.
OAuth authentication can be configured using one of the following options:
-
Client ID and secret
-
Client ID and refresh token
-
Access token
-
TLS
Client ID and secret
You can configure the address of your authorization server in the tokenEndpointUri property together with the client ID and client secret used in authentication.
The OAuth client will connect to the OAuth server, authenticate using the client ID and secret and get an access token which it will use to authenticate with the Kafka broker.
In the clientSecret property, specify a link to a Secret containing the client secret.
An example of OAuth client authentication using client ID and client secret
authentication:
type: oauth
tokenEndpointUri: https://sso.myproject.svc:8443/auth/realms/internal/protocol/openid-connect/token
clientId: my-client-id
clientSecret:
secretName: my-client-oauth-secret
key: client-secretClient ID and refresh token
You can configure the address of your OAuth server in the tokenEndpointUri property together with the OAuth client ID and refresh token.
The OAuth client will connect to the OAuth server, authenticate using the client ID and refresh token and get an access token which it will use to authenticate with the Kafka broker.
In the refreshToken property, specify a link to a Secret containing the refresh token.
+ .An example of OAuth client authentication using client ID and refresh token
authentication:
type: oauth
tokenEndpointUri: https://sso.myproject.svc:8443/auth/realms/internal/protocol/openid-connect/token
clientId: my-client-id
refreshToken:
secretName: my-refresh-token-secret
key: refresh-tokenAccess token
You can configure the access token used for authentication with the Kafka broker directly.
In this case, you do not specify the tokenEndpointUri.
In the accessToken property, specify a link to a Secret containing the access token.
An example of OAuth client authentication using only an access token
authentication:
type: oauth
accessToken:
secretName: my-access-token-secret
key: access-tokenTLS
Accessing the OAuth server using the HTTPS protocol does not require any additional configuration as long as the TLS certificates used by it are signed by a trusted certification authority and its hostname is listed in the certificate.
If your OAuth server is using certificates which are self-signed or are signed by a certification authority which is not trusted, you can configure a list of trusted certificates in the custom resoruce.
The tlsTrustedCertificates property contains a list of secrets with key names under which the certificates are stored.
The certificates must be stored in X509 format.
An example of TLS certificates provided
authentication:
type: oauth
tokenEndpointUri: https://sso.myproject.svc:8443/auth/realms/internal/protocol/openid-connect/token
clientId: my-client-id
refreshToken:
secretName: my-refresh-token-secret
key: refresh-token
tlsTrustedCertificates:
- secretName: oauth-server-ca
certificate: tls.crtThe OAuth client will by default verify that the hostname of your OAuth server matches either the certificate subject or one of the alternative DNS names. If it is not required, you can disable the hostname verification.
An example of disabled TLS hostname verification
authentication:
type: oauth
tokenEndpointUri: https://sso.myproject.svc:8443/auth/realms/internal/protocol/openid-connect/token
clientId: my-client-id
refreshToken:
secretName: my-refresh-token-secret
key: refresh-token
disableTlsHostnameVerification: trueThe type property is a discriminator that distinguishes the use of the type KafkaClientAuthenticationOAuth from KafkaClientAuthenticationTls, KafkaClientAuthenticationScramSha512, KafkaClientAuthenticationPlain.
It must have the value oauth for the type KafkaClientAuthenticationOAuth.
| Property | Description |
|---|---|
accessToken |
Link to Kubernetes Secret containing the access token which was obtained from the authorization server. |
accessTokenIsJwt |
Configure whether access token should be treated as JWT. This should be set to |
boolean |
|
clientId |
OAuth Client ID which the Kafka client can use to authenticate against the OAuth server and use the token endpoint URI. |
string |
|
clientSecret |
Link to Kubernetes Secret containing the OAuth client secret which the Kafka client can use to authenticate against the OAuth server and use the token endpoint URI. |
disableTlsHostnameVerification |
Enable or disable TLS hostname verification. Default value is |
boolean |
|
maxTokenExpirySeconds |
Set or limit time-to-live of the access tokens to the specified number of seconds. This should be set if the authorization server returns opaque tokens. |
integer |
|
refreshToken |
Link to Kubernetes Secret containing the refresh token which can be used to obtain access token from the authorization server. |
scope |
OAuth scope to use when authenticating against the authorization server. Some authorization servers require this to be set. The possible values depend on how authorization server is configured. By default |
string |
|
tlsTrustedCertificates |
Trusted certificates for TLS connection to the OAuth server. |
|
|
tokenEndpointUri |
Authorization server token endpoint URI. |
string |
|
type |
Must be |
string |
B.91. JaegerTracing schema reference
Used in: KafkaBridgeSpec, KafkaConnectS2ISpec, KafkaConnectSpec, KafkaMirrorMaker2Spec, KafkaMirrorMakerSpec
The type property is a discriminator that distinguishes the use of the type JaegerTracing from other subtypes which may be added in the future.
It must have the value jaeger for the type JaegerTracing.
| Property | Description |
|---|---|
type |
Must be |
string |
B.92. KafkaConnectTemplate schema reference
| Property | Description |
|---|---|
deployment |
Template for Kafka Connect |
pod |
Template for Kafka Connect |
apiService |
Template for Kafka Connect API |
connectContainer |
Template for the Kafka Connect container. |
initContainer |
Template for the Kafka init container. |
podDisruptionBudget |
Template for Kafka Connect |
B.93. ExternalConfiguration schema reference
Configures external storage properties that define configuration options for Kafka Connect connectors.
You can mount ConfigMaps or Secrets into a Kafka Connect pod as environment variables or volumes.
Volumes and environment variables are configured in the externalConfiguration property in KafkaConnect.spec and KafkaConnectS2I.spec.
When applied, the environment variables and volumes are available for use when developing your connectors.
B.93.1. env
The env property is used to specify one or more environment variables.
These variables can contain a value from either a ConfigMap or a Secret.
Example Secret containing values for environment variables
apiVersion: v1
kind: Secret
metadata:
name: aws-creds
type: Opaque
data:
awsAccessKey: QUtJQVhYWFhYWFhYWFhYWFg=
awsSecretAccessKey: Ylhsd1lYTnpkMjl5WkE=|
Note
|
The names of user-defined environment variables cannot start with KAFKA_ or STRIMZI_.
|
To mount a value from a Secret to an environment variable, use the valueFrom property and the secretKeyRef.
Example environment variables set to values from a Secret
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
metadata:
name: my-connect
spec:
# ...
externalConfiguration:
env:
- name: AWS_ACCESS_KEY_ID
valueFrom:
secretKeyRef:
name: aws-creds
key: awsAccessKey
- name: AWS_SECRET_ACCESS_KEY
valueFrom:
secretKeyRef:
name: aws-creds
key: awsSecretAccessKeyA common use case for mounting Secrets to environment variables is when your connector needs to communicate with Amazon AWS and needs to read the AWS_ACCESS_KEY_ID and AWS_SECRET_ACCESS_KEY environment variables with credentials.
To mount a value from a ConfigMap to an environment variable, use configMapKeyRef in the valueFrom property as shown in the following example.
Example environment variables set to values from a ConfigMap
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
metadata:
name: my-connect
spec:
# ...
externalConfiguration:
env:
- name: MY_ENVIRONMENT_VARIABLE
valueFrom:
configMapKeyRef:
name: my-config-map
key: my-keyB.93.2. volumes
You can also mount ConfigMaps or Secrets to a Kafka Connect pod as volumes.
Using volumes instead of environment variables is useful in the following scenarios:
-
Mounting truststores or keystores with TLS certificates
-
Mounting a properties file that is used to configure Kafka Connect connectors
Example Secret with properties
apiVersion: v1
kind: Secret
metadata:
name: mysecret
type: Opaque
stringData:
connector.properties: |- (1)
dbUsername: my-user (2)
dbPassword: my-password-
The connector configuration in properties file format.
-
Database username and password properties used in the configuration.
In this example, a Secret named mysecret is mounted to a volume named connector-config.
In the config property, a configuration provider (FileConfigProvider) is specified, which will load configuration values from external sources.
The Kafka FileConfigProvider is given the alias file,
and will read and extract database username and password property values from the file to use in the connector configuration.
Example external volumes set to values from a Secret
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaConnect
metadata:
name: my-connect
spec:
# ...
config:
config.providers: file (1)
config.providers.file.class: org.apache.kafka.common.config.provider.FileConfigProvider (2)
#...
externalConfiguration:
volumes:
- name: connector-config (3)
secret:
secretName: mysecret (4)-
The alias for the configuration provider, which is used to define other configuration parameters. Use a comma-separated list if you want to add more than one provider.
-
The
FileConfigProvideris the configuration provider that provides values from properties files. The parameter uses the alias fromconfig.providers, taking the formconfig.providers.${alias}.class. -
The name of the volume containing the Secret. Each volume must specify a name in the
nameproperty and a reference to ConfigMap or Secret. -
The name of the Secret.
The volumes are mounted inside the Kafka Connect containers in the path /opt/kafka/external-configuration/<volume-name>.
For example, the files from a volume named connector-config would appear in the directory /opt/kafka/external-configuration/connector-config.
The FileConfigProvider is used to read the values from the mounted properties files in connector configurations.
| Property | Description |
|---|---|
env |
Allows to pass data from Secret or ConfigMap to the Kafka Connect pods as environment variables. |
|
|
volumes |
Allows to pass data from Secret or ConfigMap to the Kafka Connect pods as volumes. |
B.94. ExternalConfigurationEnv schema reference
Used in: ExternalConfiguration
| Property | Description |
|---|---|
name |
Name of the environment variable which will be passed to the Kafka Connect pods. The name of the environment variable cannot start with |
string |
|
valueFrom |
Value of the environment variable which will be passed to the Kafka Connect pods. It can be passed either as a reference to Secret or ConfigMap field. The field has to specify exactly one Secret or ConfigMap. |
B.95. ExternalConfigurationEnvVarSource schema reference
Used in: ExternalConfigurationEnv
| Property | Description |
|---|---|
configMapKeyRef |
Refernce to a key in a ConfigMap. See external documentation of core/v1 configmapkeyselector. |
secretKeyRef |
Reference to a key in a Secret. See external documentation of core/v1 secretkeyselector. |
B.96. ExternalConfigurationVolumeSource schema reference
Used in: ExternalConfiguration
| Property | Description |
|---|---|
configMap |
Reference to a key in a ConfigMap. Exactly one Secret or ConfigMap has to be specified. See external documentation of core/v1 configmapvolumesource. |
name |
Name of the volume which will be added to the Kafka Connect pods. |
string |
|
secret |
Reference to a key in a Secret. Exactly one Secret or ConfigMap has to be specified. See external documentation of core/v1 secretvolumesource. |
B.97. KafkaConnectStatus schema reference
Used in: KafkaConnect
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
url |
The URL of the REST API endpoint for managing and monitoring Kafka Connect connectors. |
string |
|
connectorPlugins |
The list of connector plugins available in this Kafka Connect deployment. |
|
|
labelSelector |
Label selector for pods providing this resource. |
string |
|
replicas |
The current number of pods being used to provide this resource. |
integer |
B.98. ConnectorPlugin schema reference
| Property | Description |
|---|---|
type |
The type of the connector plugin. The available types are |
string |
|
version |
The version of the connector plugin. |
string |
|
class |
The class of the connector plugin. |
string |
B.99. KafkaConnectS2I schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka Connect Source-to-Image (S2I) cluster. |
status |
The status of the Kafka Connect Source-to-Image (S2I) cluster. |
B.100. KafkaConnectS2ISpec schema reference
Used in: KafkaConnectS2I
Configures a Kafka Connect cluster with Source-to-Image (S2I) support.
When extending Kafka Connect with connector plugins on OpenShift (only), you can use OpenShift builds and S2I to create a container image that is used by the Kafka Connect deployment.
The configuration options are similar to Kafka Connect configuration using the KafkaConnectSpec schema.
| Property | Description |
|---|---|
replicas |
The number of pods in the Kafka Connect group. |
integer |
|
image |
The docker image for the pods. |
string |
|
buildResources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
jvmOptions |
JVM Options for pods. |
affinity |
The property |
logging |
Logging configuration for Kafka Connect. The type depends on the value of the |
metrics |
The Prometheus JMX Exporter configuration. See https://github.com/prometheus/jmx_exporter for details of the structure of this configuration. |
map |
|
template |
Template for Kafka Connect and Kafka Connect S2I resources. The template allows users to specify how the |
authentication |
Authentication configuration for Kafka Connect. The type depends on the value of the |
|
|
bootstrapServers |
Bootstrap servers to connect to. This should be given as a comma separated list of <hostname>:<port> pairs. |
string |
|
clientRackInitImage |
The image of the init container used for initializing the |
string |
|
config |
The Kafka Connect configuration. Properties with the following prefixes cannot be set: ssl., sasl., security., listeners, plugin.path, rest., bootstrap.servers, consumer.interceptor.classes, producer.interceptor.classes (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
|
externalConfiguration |
Pass data from Secrets or ConfigMaps to the Kafka Connect pods and use them to configure connectors. |
insecureSourceRepository |
When true this configures the source repository with the 'Local' reference policy and an import policy that accepts insecure source tags. |
boolean |
|
rack |
Configuration of the node label which will be used as the client.rack consumer configuration. |
resources |
The maximum limits for CPU and memory resources and the requested initial resources. See external documentation of core/v1 resourcerequirements. |
tls |
TLS configuration. |
tolerations |
The property |
Toleration array |
|
tracing |
The configuration of tracing in Kafka Connect. The type depends on the value of the |
version |
The Kafka Connect version. Defaults to 2.6.0. Consult the user documentation to understand the process required to upgrade or downgrade the version. |
string |
B.101. KafkaConnectS2IStatus schema reference
Used in: KafkaConnectS2I
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
url |
The URL of the REST API endpoint for managing and monitoring Kafka Connect connectors. |
string |
|
connectorPlugins |
The list of connector plugins available in this Kafka Connect deployment. |
|
|
buildConfigName |
The name of the build configuration. |
string |
|
labelSelector |
Label selector for pods providing this resource. |
string |
|
replicas |
The current number of pods being used to provide this resource. |
integer |
B.102. KafkaTopic schema reference
| Property | Description |
|---|---|
spec |
The specification of the topic. |
status |
The status of the topic. |
B.103. KafkaTopicSpec schema reference
Used in: KafkaTopic
| Property | Description |
|---|---|
partitions |
The number of partitions the topic should have. This cannot be decreased after topic creation. It can be increased after topic creation, but it is important to understand the consequences that has, especially for topics with semantic partitioning. |
integer |
|
replicas |
The number of replicas the topic should have. |
integer |
|
config |
The topic configuration. |
map |
|
topicName |
The name of the topic. When absent this will default to the metadata.name of the topic. It is recommended to not set this unless the topic name is not a valid Kubernetes resource name. |
string |
B.104. KafkaTopicStatus schema reference
Used in: KafkaTopic
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
B.105. KafkaUser schema reference
| Property | Description |
|---|---|
spec |
The specification of the user. |
status |
The status of the Kafka User. |
B.106. KafkaUserSpec schema reference
Used in: KafkaUser
| Property | Description |
|---|---|
authentication |
Authentication mechanism enabled for this Kafka user. The type depends on the value of the |
|
|
authorization |
Authorization rules for this Kafka user. The type depends on the value of the |
quotas |
Quotas on requests to control the broker resources used by clients. Network bandwidth and request rate quotas can be enforced.Kafka documentation for Kafka User quotas can be found at http://kafka.apache.org/documentation/#design_quotas. |
template |
Template to specify how Kafka User |
B.107. KafkaUserTlsClientAuthentication schema reference
Used in: KafkaUserSpec
The type property is a discriminator that distinguishes the use of the type KafkaUserTlsClientAuthentication from KafkaUserScramSha512ClientAuthentication.
It must have the value tls for the type KafkaUserTlsClientAuthentication.
| Property | Description |
|---|---|
type |
Must be |
string |
B.108. KafkaUserScramSha512ClientAuthentication schema reference
Used in: KafkaUserSpec
The type property is a discriminator that distinguishes the use of the type KafkaUserScramSha512ClientAuthentication from KafkaUserTlsClientAuthentication.
It must have the value scram-sha-512 for the type KafkaUserScramSha512ClientAuthentication.
| Property | Description |
|---|---|
type |
Must be |
string |
B.109. KafkaUserAuthorizationSimple schema reference
Used in: KafkaUserSpec
The type property is a discriminator that distinguishes the use of the type KafkaUserAuthorizationSimple from other subtypes which may be added in the future.
It must have the value simple for the type KafkaUserAuthorizationSimple.
| Property | Description |
|---|---|
type |
Must be |
string |
|
acls |
List of ACL rules which should be applied to this user. |
|
B.110. AclRule schema reference
Used in: KafkaUserAuthorizationSimple
Configures access control rule for a KafkaUser when brokers are using the AclAuthorizer.
Example
KafkaUser configuration with authorizationapiVersion: kafka.strimzi.io/v1beta1
kind: KafkaUser
metadata:
name: my-user
labels:
strimzi.io/cluster: my-cluster
spec:
# ...
authorization:
type: simple
acls:
- resource:
type: topic
name: my-topic
patternType: literal
operation: Read
- resource:
type: topic
name: my-topic
patternType: literal
operation: Describe
- resource:
type: group
name: my-group
patternType: prefix
operation: ReadB.110.1. resource
Use the resource property to specify the resource that the rule applies to.
Simple authorization supports four resource types, which are specified in the type property:
-
Topics (
topic) -
Consumer Groups (
group) -
Clusters (
cluster) -
Transactional IDs (
transactionalId)
For Topic, Group, and Transactional ID resources you can specify the name of the resource the rule applies to in the name property.
Cluster type resources have no name.
A name is specified as a literal or a prefix using the patternType property.
-
Literal names are taken exactly as they are specified in the
namefield. -
Prefix names use the value from the
nameas a prefix, and will apply the rule to all resources with names starting with the value.
B.110.2. type
The type of rule, which is to allow or deny (not currently supported) an operation.
The type field is optional.
If type is unspecified, the ACL rule is treated as an allow rule.
B.110.3. operation
Specify an operation for the rule to allow or deny.
The following operations are supported:
-
Read
-
Write
-
Delete
-
Alter
-
Describe
-
All
-
IdempotentWrite
-
ClusterAction
-
Create
-
AlterConfigs
-
DescribeConfigs
Only certain operations work with each resource.
For more details about AclAuthorizer, ACLs and supported combinations of resources and operations, see Authorization and ACLs.
B.110.4. host
Use the host property to specify a remote host from which the rule is allowed or denied.
Use an asterisk (*) to allow or deny the operation from all hosts.
The host field is optional. If host is unspecified, the * value is used by default.
| Property | Description |
|---|---|
host |
The host from which the action described in the ACL rule is allowed or denied. |
string |
|
operation |
Operation which will be allowed or denied. Supported operations are: Read, Write, Create, Delete, Alter, Describe, ClusterAction, AlterConfigs, DescribeConfigs, IdempotentWrite and All. |
string (one of [Read, Write, Delete, Alter, Describe, All, IdempotentWrite, ClusterAction, Create, AlterConfigs, DescribeConfigs]) |
|
resource |
Indicates the resource for which given ACL rule applies. The type depends on the value of the |
|
|
type |
The type of the rule. Currently the only supported type is |
string (one of [allow, deny]) |
B.111. AclRuleTopicResource schema reference
Used in: AclRule
The type property is a discriminator that distinguishes the use of the type AclRuleTopicResource from AclRuleGroupResource, AclRuleClusterResource, AclRuleTransactionalIdResource.
It must have the value topic for the type AclRuleTopicResource.
| Property | Description |
|---|---|
type |
Must be |
string |
|
name |
Name of resource for which given ACL rule applies. Can be combined with |
string |
|
patternType |
Describes the pattern used in the resource field. The supported types are |
string (one of [prefix, literal]) |
B.112. AclRuleGroupResource schema reference
Used in: AclRule
The type property is a discriminator that distinguishes the use of the type AclRuleGroupResource from AclRuleTopicResource, AclRuleClusterResource, AclRuleTransactionalIdResource.
It must have the value group for the type AclRuleGroupResource.
| Property | Description |
|---|---|
type |
Must be |
string |
|
name |
Name of resource for which given ACL rule applies. Can be combined with |
string |
|
patternType |
Describes the pattern used in the resource field. The supported types are |
string (one of [prefix, literal]) |
B.113. AclRuleClusterResource schema reference
Used in: AclRule
The type property is a discriminator that distinguishes the use of the type AclRuleClusterResource from AclRuleTopicResource, AclRuleGroupResource, AclRuleTransactionalIdResource.
It must have the value cluster for the type AclRuleClusterResource.
| Property | Description |
|---|---|
type |
Must be |
string |
B.114. AclRuleTransactionalIdResource schema reference
Used in: AclRule
The type property is a discriminator that distinguishes the use of the type AclRuleTransactionalIdResource from AclRuleTopicResource, AclRuleGroupResource, AclRuleClusterResource.
It must have the value transactionalId for the type AclRuleTransactionalIdResource.
| Property | Description |
|---|---|
type |
Must be |
string |
|
name |
Name of resource for which given ACL rule applies. Can be combined with |
string |
|
patternType |
Describes the pattern used in the resource field. The supported types are |
string (one of [prefix, literal]) |
B.115. KafkaUserQuotas schema reference
Used in: KafkaUserSpec
Kafka allows a user to set quotas to control the use of resources by clients.
B.115.1. quotas
Quotas split into two categories:
-
Network usage quotas, which are defined as the byte rate threshold for each group of clients sharing a quota
-
CPU utilization quotas, which are defined as the percentage of time a client can utilize on request handler I/O threads and network threads of each broker within a quota window
Using quotas for Kafka clients might be useful in a number of situations. Consider a wrongly configured Kafka producer which is sending requests at too high a rate. Such misconfiguration can cause a denial of service to other clients, so the problematic client ought to be blocked. By using a network limiting quota, it is possible to prevent this situation from significantly impacting other clients.
Strimzi supports user-level quotas, but not client-level quotas.
An example Kafka user quotas
spec:
quotas:
producerByteRate: 1048576
consumerByteRate: 2097152
requestPercentage: 55For more info about Kafka user quotas, refer to the Apache Kafka documentation.
| Property | Description |
|---|---|
consumerByteRate |
A quota on the maximum bytes per-second that each client group can fetch from a broker before the clients in the group are throttled. Defined on a per-broker basis. |
integer |
|
producerByteRate |
A quota on the maximum bytes per-second that each client group can publish to a broker before the clients in the group are throttled. Defined on a per-broker basis. |
integer |
|
requestPercentage |
A quota on the maximum CPU utilization of each client group as a percentage of network and I/O threads. |
integer |
B.116. KafkaUserTemplate schema reference
Used in: KafkaUserSpec
Specify additional labels and annotations for the secret created by the User Operator.
An example showing the
KafkaUserTemplateapiVersion: kafka.strimzi.io/v1beta1
kind: KafkaUser
metadata:
name: my-user
labels:
strimzi.io/cluster: my-cluster
spec:
authentication:
type: tls
template:
secret:
metadata:
labels:
label1: value1
annotations:
anno1: value1
# ...| Property | Description |
|---|---|
secret |
Template for KafkaUser resources. The template allows users to specify how the |
B.117. KafkaUserStatus schema reference
Used in: KafkaUser
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
username |
Username. |
string |
|
secret |
The name of |
string |
B.118. KafkaMirrorMaker schema reference
| Property | Description |
|---|---|
spec |
The specification of Kafka MirrorMaker. |
status |
The status of Kafka MirrorMaker. |
B.119. KafkaMirrorMakerSpec schema reference
Used in: KafkaMirrorMaker
Configures Kafka MirrorMaker.
B.119.1. whitelist
Use the whitelist property to configure a list of topics that Kafka MirrorMaker mirrors from the source to the target Kafka cluster.
The property allows any regular expression from the simplest case with a single topic name to complex patterns. For example, you can mirror topics A and B using "A|B" or all topics using "*". You can also pass multiple regular expressions separated by commas to the Kafka MirrorMaker.
B.119.2. KafkaMirrorMakerConsumerSpec and KafkaMirrorMakerProducerSpec
Use the KafkaMirrorMakerConsumerSpec and KafkaMirrorMakerProducerSpec to configure source (consumer) and target (producer) clusters.
Kafka MirrorMaker always works together with two Kafka clusters (source and target).
To establish a connection, the bootstrap servers for the source and the target Kafka clusters are specified as comma-separated lists of HOSTNAME:PORT pairs.
Each comma-separated list contains one or more Kafka brokers or a Service pointing to Kafka brokers specified as a HOSTNAME:PORT pair.
B.119.3. logging
Kafka MirrorMaker has its own configurable logger:
-
mirrormaker.root.logger
MirrorMaker uses the Apache log4j logger implementation.
Use the logging property to configure loggers and logger levels.
You can set the log levels by specifying the logger and level directly (inline) or use a custom (external) ConfigMap.
If a ConfigMap is used, you set logging.name property to the name of the ConfigMap containing the external logging configuration. Inside the ConfigMap, the logging configuration is described using log4j.properties.
For more information about log levels, see Apache logging services.
Here we see examples of inline and external logging:
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaMirrorMaker
spec:
# ...
logging:
type: inline
loggers:
mirrormaker.root.logger: "INFO"
# ...apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaMirrorMaker
spec:
# ...
logging:
type: external
name: customConfigMap
# ...Garbage collector (GC)
Garbage collector logging can also be enabled (or disabled) using the jvmOptions property.
| Property | Description |
|---|---|
replicas |
The number of pods in the |
integer |
|
image |
The docker image for the pods. |
string |
|
whitelist |
List of topics which are included for mirroring. This option allows any regular expression using Java-style regular expressions. Mirroring two topics named A and B is achieved by using the whitelist |
string |
|
consumer |
Configuration of source cluster. |
producer |
Configuration of target cluster. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
affinity |
The property |
tolerations |
The property |
Toleration array |
|
jvmOptions |
JVM Options for pods. |
logging |
Logging configuration for MirrorMaker. The type depends on the value of the |
metrics |
The Prometheus JMX Exporter configuration. See JMX Exporter documentation for details of the structure of this configuration. |
map |
|
tracing |
The configuration of tracing in Kafka MirrorMaker. The type depends on the value of the |
template |
Template to specify how Kafka MirrorMaker resources, |
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
version |
The Kafka MirrorMaker version. Defaults to 2.6.0. Consult the documentation to understand the process required to upgrade or downgrade the version. |
string |
B.120. KafkaMirrorMakerConsumerSpec schema reference
Used in: KafkaMirrorMakerSpec
Configures a MirrorMaker consumer.
B.120.1. numStreams
Use the consumer.numStreams property to configure the number of streams for the consumer.
You can increase the throughput in mirroring topics by increasing the number of consumer threads. Consumer threads belong to the consumer group specified for Kafka MirrorMaker. Topic partitions are assigned across the consumer threads, which consume messages in parallel.
B.120.2. offsetCommitInterval
Use the consumer.offsetCommitInterval property to configure an offset auto-commit interval for the consumer.
You can specify the regular time interval at which an offset is committed after Kafka MirrorMaker has consumed data from the source Kafka cluster. The time interval is set in milliseconds, with a default value of 60,000.
B.120.3. config
Use the consumer.config properties to configure Kafka options for the consumer.
The config property contains the Kafka MirrorMaker consumer configuration options as keys, with values set in one of the following JSON types:
-
String
-
Number
-
Boolean
For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
You can also configure the ssl.endpoint.identification.algorithm property to enable or disable hostname verification.
Exceptions
You can specify and configure the options listed in the Apache Kafka configuration documentation for consumers.
However, there are exceptions for options automatically configured and managed directly by Strimzi related to:
-
Kafka cluster bootstrap address
-
Security (encryption, authentication, and authorization)
-
Consumer group identifier
-
Interceptors
Specifically, all configuration options with keys equal to or starting with one of the following strings are forbidden:
-
bootstrap.servers -
group.id -
interceptor.classes -
sasl. -
security.
When a forbidden option is present in the config property, it is ignored and a warning message is printed to the Cluster Operator log file.
All other options are passed to Kafka MirrorMaker.
|
Important
|
The Cluster Operator does not validate keys or values in the provided config object.
When an invalid configuration is provided, the Kafka MirrorMaker might not start or might become unstable.
In such cases, the configuration in the KafkaMirrorMaker.spec.consumer.config object should be fixed and the Cluster Operator will roll out the new configuration for Kafka MirrorMaker.
|
B.120.4. groupId
Use the consumer.groupId property to configure a consumer group identifier for the consumer.
Kafka MirrorMaker uses a Kafka consumer to consume messages, behaving like any other Kafka consumer client. Messages consumed from the source Kafka cluster are mirrored to a target Kafka cluster. A group identifier is required, as the consumer needs to be part of a consumer group for the assignment of partitions.
| Property | Description |
|---|---|
numStreams |
Specifies the number of consumer stream threads to create. |
integer |
|
offsetCommitInterval |
Specifies the offset auto-commit interval in ms. Default value is 60000. |
integer |
|
groupId |
A unique string that identifies the consumer group this consumer belongs to. |
string |
|
bootstrapServers |
A list of host:port pairs for establishing the initial connection to the Kafka cluster. |
string |
|
authentication |
Authentication configuration for connecting to the cluster. The type depends on the value of the |
|
|
config |
The MirrorMaker consumer config. Properties with the following prefixes cannot be set: ssl., bootstrap.servers, group.id, sasl., security., interceptor.classes (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
|
tls |
TLS configuration for connecting MirrorMaker to the cluster. |
B.121. KafkaMirrorMakerTls schema reference
Configures TLS trusted certificates for connecting MirrorMaker to the cluster.
B.121.1. trustedCertificates
Provide a list of secrets using the trustedCertificates property.
| Property | Description |
|---|---|
trustedCertificates |
Trusted certificates for TLS connection. |
|
B.122. KafkaMirrorMakerProducerSpec schema reference
Used in: KafkaMirrorMakerSpec
Configures a MirrorMaker producer.
B.122.1. abortOnSendFailure
Use the producer.abortOnSendFailure property to configure how to handle message send failure from the producer.
By default, if an error occurs when sending a message from Kafka MirrorMaker to a Kafka cluster:
-
The Kafka MirrorMaker container is terminated in Kubernetes.
-
The container is then recreated.
If the abortOnSendFailure option is set to false, message sending errors are ignored.
B.122.2. config
Use the producer.config properties to configure Kafka options for the producer.
The config property contains the Kafka MirrorMaker producer configuration options as keys, with values set in one of the following JSON types:
-
String
-
Number
-
Boolean
For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
You can also configure the ssl.endpoint.identification.algorithm property to enable or disable hostname verification.
Exceptions
You can specify and configure the options listed in the Apache Kafka configuration documentation for producers.
However, there are exceptions for options automatically configured and managed directly by Strimzi related to:
-
Kafka cluster bootstrap address
-
Security (encryption, authentication, and authorization)
-
Interceptors
Specifically, all configuration options with keys equal to or starting with one of the following strings are forbidden:
-
bootstrap.servers -
interceptor.classes -
sasl. -
security.
When a forbidden option is present in the config property, it is ignored and a warning message is printed to the Cluster Operator log file.
All other options are passed to Kafka MirrorMaker.
|
Important
|
The Cluster Operator does not validate keys or values in the provided config object.
When an invalid configuration is provided, the Kafka MirrorMaker might not start or might become unstable.
In such cases, the configuration in the KafkaMirrorMaker.spec.producer.config object should be fixed and the Cluster Operator will roll out the new configuration for Kafka MirrorMaker.
|
| Property | Description |
|---|---|
bootstrapServers |
A list of host:port pairs for establishing the initial connection to the Kafka cluster. |
string |
|
abortOnSendFailure |
Flag to set the MirrorMaker to exit on a failed send. Default value is |
boolean |
|
authentication |
Authentication configuration for connecting to the cluster. The type depends on the value of the |
|
|
config |
The MirrorMaker producer config. Properties with the following prefixes cannot be set: ssl., bootstrap.servers, sasl., security., interceptor.classes (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
|
tls |
TLS configuration for connecting MirrorMaker to the cluster. |
B.123. KafkaMirrorMakerTemplate schema reference
Used in: KafkaMirrorMakerSpec
| Property | Description |
|---|---|
deployment |
Template for Kafka MirrorMaker |
pod |
Template for Kafka MirrorMaker |
mirrorMakerContainer |
Template for Kafka MirrorMaker container. |
podDisruptionBudget |
Template for Kafka MirrorMaker |
B.124. KafkaMirrorMakerStatus schema reference
Used in: KafkaMirrorMaker
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
labelSelector |
Label selector for pods providing this resource. |
string |
|
replicas |
The current number of pods being used to provide this resource. |
integer |
B.125. KafkaBridge schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka Bridge. |
status |
The status of the Kafka Bridge. |
B.126. KafkaBridgeSpec schema reference
Used in: KafkaBridge
Configures a Kafka Bridge cluster.
Configuration options relate to:
-
Kafka cluster bootstrap address
-
Security (Encryption, Authentication, and Authorization)
-
Consumer configuration
-
Producer configuration
-
HTTP configuration
B.126.1. logging
Kafka Bridge has its own configurable loggers:
-
logger.bridge -
logger.<operation-id>
You can replace <operation-id> in the logger.<operation-id> logger to set log levels for specific operations:
-
createConsumer -
deleteConsumer -
subscribe -
unsubscribe -
poll -
assign -
commit -
send -
sendToPartition -
seekToBeginning -
seekToEnd -
seek -
healthy -
ready -
openapi
Each operation is defined according OpenAPI specification, and has a corresponding API endpoint through which the bridge receives requests from HTTP clients. You can change the log level on each endpoint to create fine-grained logging information about the incoming and outgoing HTTP requests.
Each logger has to be configured assigning it a name as http.openapi.operation.<operation-id>.
For example, configuring the logging level for the send operation logger means defining the following:
logger.send.name = http.openapi.operation.send
logger.send.level = DEBUGKafka Bridge uses the Apache log4j2 logger implementation.
Loggers are defined in the log4j2.properties file, which has the following default configuration for healthy and ready endpoints:
logger.healthy.name = http.openapi.operation.healthy
logger.healthy.level = WARN
logger.ready.name = http.openapi.operation.ready
logger.ready.level = WARNThe log level of all other operations is set to INFO by default.
Use the logging property to configure loggers and logger levels.
You can set the log levels by specifying the logger and level directly (inline) or use a custom (external) ConfigMap.
If a ConfigMap is used, you set logging.name property to the name of the ConfigMap containing the external logging configuration.
Inside the ConfigMap, the logging configuration is described using log4j.properties.
For more information about log levels, see Apache logging services.
Here we see examples of inline and external logging.
Inline logging
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaBridge
spec:
# ...
logging:
type: inline
loggers:
logger.bridge.level: "INFO"
# enabling DEBUG just for send operation
logger.send.name: "http.openapi.operation.send"
logger.send.level: "DEBUG"
# ...External logging
apiVersion: kafka.strimzi.io/v1beta1
kind: KafkaBridge
spec:
# ...
logging:
type: external
name: customConfigMap
# ...Any available loggers that are not configured have their level set to OFF.
If the Kafka Bridge was deployed using the Cluster Operator, changes to Kafka Bridge logging levels are applied dynamically.
If you use external logging, a rolling update is triggered when logging appenders are changed.
Garbage collector (GC)
Garbage collector logging can also be enabled (or disabled) using the jvmOptions property.
| Property | Description |
|---|---|
replicas |
The number of pods in the |
integer |
|
image |
The docker image for the pods. |
string |
|
bootstrapServers |
A list of host:port pairs for establishing the initial connection to the Kafka cluster. |
string |
|
tls |
TLS configuration for connecting Kafka Bridge to the cluster. |
authentication |
Authentication configuration for connecting to the cluster. The type depends on the value of the |
|
|
http |
The HTTP related configuration. |
consumer |
Kafka consumer related configuration. |
producer |
Kafka producer related configuration. |
resources |
CPU and memory resources to reserve. See external documentation of core/v1 resourcerequirements. |
jvmOptions |
Currently not supported JVM Options for pods. |
logging |
Logging configuration for Kafka Bridge. The type depends on the value of the |
enableMetrics |
Enable the metrics for the Kafka Bridge. Default is false. |
boolean |
|
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
template |
Template for Kafka Bridge resources. The template allows users to specify how is the |
tracing |
The configuration of tracing in Kafka Bridge. The type depends on the value of the |
B.127. KafkaBridgeTls schema reference
Used in: KafkaBridgeSpec
| Property | Description |
|---|---|
trustedCertificates |
Trusted certificates for TLS connection. |
|
B.128. KafkaBridgeHttpConfig schema reference
Used in: KafkaBridgeSpec
Configures HTTP access to a Kafka cluster for the Kafka Bridge.
The default HTTP configuration is for the Kafka Bridge to listen on port 8080.
B.128.1. cors
As well as enabling HTTP access to a Kafka cluster, HTTP properties provide the capability to enable and define access control for the Kafka Bridge through Cross-Origin Resource Sharing (CORS). CORS is a HTTP mechanism that allows browser access to selected resources from more than one origin. To configure CORS, you define a list of allowed resource origins and HTTP access methods. For the origins, you can use a URL or a Java regular expression.
Example Kafka Bridge HTTP configuration
apiVersion: kafka.strimzi.io/v1alpha1
kind: KafkaBridge
metadata:
name: my-bridge
spec:
# ...
http:
port: 8080
cors:
allowedOrigins: "https://strimzi.io"
allowedMethods: "GET,POST,PUT,DELETE,OPTIONS,PATCH"
# ...| Property | Description |
|---|---|
port |
The port which is the server listening on. |
integer |
|
cors |
CORS configuration for the HTTP Bridge. |
B.129. KafkaBridgeHttpCors schema reference
Used in: KafkaBridgeHttpConfig
| Property | Description |
|---|---|
allowedOrigins |
List of allowed origins. Java regular expressions can be used. |
string array |
|
allowedMethods |
List of allowed HTTP methods. |
string array |
B.130. KafkaBridgeConsumerSpec schema reference
Used in: KafkaBridgeSpec
Configures consumer options for the Kafka Bridge as keys.
The values can be one of the following JSON types:
-
String
-
Number
-
Boolean
You can specify and configure the options listed in the Apache Kafka configuration documentation for consumers with the exception of those options which are managed directly by Strimzi. Specifically, all configuration options with keys equal to or starting with one of the following strings are forbidden:
-
ssl. -
sasl. -
security. -
bootstrap.servers -
group.id
When one of the forbidden options is present in the config property, it is ignored and a warning message will be printed to the Cluster Operator log file.
All other options will be passed to Kafka
|
Important
|
The Cluster Operator does not validate keys or values in the config object.
If an invalid configuration is provided, the Kafka Bridge cluster might not start or might become unstable.
Fix the configuration so that the Cluster Operator can roll out the new configuration to all Kafka Bridge nodes.
|
There are exceptions to the forbidden options.
For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
Example Kafka Bridge consumer configuration
apiVersion: kafka.strimzi.io/v1alpha1
kind: KafkaBridge
metadata:
name: my-bridge
spec:
# ...
consumer:
config:
auto.offset.reset: earliest
enable.auto.commit: true
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384"
ssl.enabled.protocols: "TLSv1.2"
ssl.protocol: "TLSv1.2"
ssl.endpoint.identification.algorithm: HTTPS
# ...| Property | Description |
|---|---|
config |
The Kafka consumer configuration used for consumer instances created by the bridge. Properties with the following prefixes cannot be set: ssl., bootstrap.servers, group.id, sasl., security. (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
B.131. KafkaBridgeProducerSpec schema reference
Used in: KafkaBridgeSpec
Configures producer options for the Kafka Bridge as keys.
The values can be one of the following JSON types:
-
String
-
Number
-
Boolean
You can specify and configure the options listed in the Apache Kafka configuration documentation for producers with the exception of those options which are managed directly by Strimzi. Specifically, all configuration options with keys equal to or starting with one of the following strings are forbidden:
-
ssl. -
sasl. -
security. -
bootstrap.servers
When one of the forbidden options is present in the config property, it is ignored and a warning message will be printed to the Cluster Operator log file.
All other options will be passed to Kafka
|
Important
|
The Cluster Operator does not validate keys or values in the config object.
If an invalid configuration is provided, the Kafka Bridge cluster might not start or might become unstable.
Fix the configuration so that the Cluster Operator can roll out the new configuration to all Kafka Bridge nodes.
|
There are exceptions to the forbidden options.
For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
Example Kafka Bridge producer configuration
apiVersion: kafka.strimzi.io/v1alpha1
kind: KafkaBridge
metadata:
name: my-bridge
spec:
# ...
producer:
config:
acks: 1
delivery.timeout.ms: 300000
ssl.cipher.suites: "TLS_ECDHE_RSA_WITH_AES_256_GCM_SHA384"
ssl.enabled.protocols: "TLSv1.2"
ssl.protocol: "TLSv1.2"
ssl.endpoint.identification.algorithm: HTTPS
# ...| Property | Description |
|---|---|
config |
The Kafka producer configuration used for producer instances created by the bridge. Properties with the following prefixes cannot be set: ssl., bootstrap.servers, sasl., security. (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
B.132. KafkaBridgeTemplate schema reference
Used in: KafkaBridgeSpec
| Property | Description |
|---|---|
deployment |
Template for Kafka Bridge |
pod |
Template for Kafka Bridge |
apiService |
Template for Kafka Bridge API |
bridgeContainer |
Template for the Kafka Bridge container. |
podDisruptionBudget |
Template for Kafka Bridge |
B.133. KafkaBridgeStatus schema reference
Used in: KafkaBridge
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
url |
The URL at which external client applications can access the Kafka Bridge. |
string |
|
labelSelector |
Label selector for pods providing this resource. |
string |
|
replicas |
The current number of pods being used to provide this resource. |
integer |
B.134. KafkaConnector schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka Connector. |
status |
The status of the Kafka Connector. |
B.135. KafkaConnectorSpec schema reference
Used in: KafkaConnector
| Property | Description |
|---|---|
class |
The Class for the Kafka Connector. |
string |
|
tasksMax |
The maximum number of tasks for the Kafka Connector. |
integer |
|
config |
The Kafka Connector configuration. The following properties cannot be set: connector.class, tasks.max. |
map |
|
pause |
Whether the connector should be paused. Defaults to false. |
boolean |
B.136. KafkaConnectorStatus schema reference
Used in: KafkaConnector
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
connectorStatus |
The connector status, as reported by the Kafka Connect REST API. |
map |
|
tasksMax |
The maximum number of tasks for the Kafka Connector. |
integer |
B.137. KafkaMirrorMaker2 schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka MirrorMaker 2.0 cluster. |
status |
The status of the Kafka MirrorMaker 2.0 cluster. |
B.138. KafkaMirrorMaker2Spec schema reference
Used in: KafkaMirrorMaker2
| Property | Description |
|---|---|
replicas |
The number of pods in the Kafka Connect group. |
integer |
|
version |
The Kafka Connect version. Defaults to 2.6.0. Consult the user documentation to understand the process required to upgrade or downgrade the version. |
string |
|
image |
The docker image for the pods. |
string |
|
connectCluster |
The cluster alias used for Kafka Connect. The alias must match a cluster in the list at |
string |
|
clusters |
Kafka clusters for mirroring. |
mirrors |
Configuration of the MirrorMaker 2.0 connectors. |
resources |
The maximum limits for CPU and memory resources and the requested initial resources. See external documentation of core/v1 resourcerequirements. |
livenessProbe |
Pod liveness checking. |
readinessProbe |
Pod readiness checking. |
jvmOptions |
JVM Options for pods. |
affinity |
The property |
tolerations |
The property |
Toleration array |
|
logging |
Logging configuration for Kafka Connect. The type depends on the value of the |
metrics |
The Prometheus JMX Exporter configuration. See https://github.com/prometheus/jmx_exporter for details of the structure of this configuration. |
map |
|
tracing |
The configuration of tracing in Kafka Connect. The type depends on the value of the |
template |
Template for Kafka Connect and Kafka Connect S2I resources. The template allows users to specify how the |
externalConfiguration |
Pass data from Secrets or ConfigMaps to the Kafka Connect pods and use them to configure connectors. |
B.139. KafkaMirrorMaker2ClusterSpec schema reference
Used in: KafkaMirrorMaker2Spec
Configures Kafka clusters for mirroring.
B.139.1. config
Use the config properties to configure Kafka options.
Standard Apache Kafka configuration may be provided, restricted to those properties not managed directly by Strimzi.
For client connection using a specific cipher suite for a TLS version, you can configure allowed ssl properties.
You can also configure the ssl.endpoint.identification.algorithm property to enable or disable hostname verification.
| Property | Description |
|---|---|
alias |
Alias used to reference the Kafka cluster. |
string |
|
bootstrapServers |
A comma-separated list of |
string |
|
config |
The MirrorMaker 2.0 cluster config. Properties with the following prefixes cannot be set: ssl., sasl., security., listeners, plugin.path, rest., bootstrap.servers, consumer.interceptor.classes, producer.interceptor.classes (with the exception of: ssl.endpoint.identification.algorithm, ssl.cipher.suites, ssl.protocol, ssl.enabled.protocols). |
map |
|
tls |
TLS configuration for connecting MirrorMaker 2.0 connectors to a cluster. |
authentication |
Authentication configuration for connecting to the cluster. The type depends on the value of the |
|
B.140. KafkaMirrorMaker2Tls schema reference
Used in: KafkaMirrorMaker2ClusterSpec
| Property | Description |
|---|---|
trustedCertificates |
Trusted certificates for TLS connection. |
|
B.141. KafkaMirrorMaker2MirrorSpec schema reference
Used in: KafkaMirrorMaker2Spec
| Property | Description |
|---|---|
sourceCluster |
The alias of the source cluster used by the Kafka MirrorMaker 2.0 connectors. The alias must match a cluster in the list at |
string |
|
targetCluster |
The alias of the target cluster used by the Kafka MirrorMaker 2.0 connectors. The alias must match a cluster in the list at |
string |
|
sourceConnector |
The specification of the Kafka MirrorMaker 2.0 source connector. |
checkpointConnector |
The specification of the Kafka MirrorMaker 2.0 checkpoint connector. |
heartbeatConnector |
The specification of the Kafka MirrorMaker 2.0 heartbeat connector. |
topicsPattern |
A regular expression matching the topics to be mirrored, for example, "topic1|topic2|topic3". Comma-separated lists are also supported. |
string |
|
topicsBlacklistPattern |
A regular expression matching the topics to exclude from mirroring. Comma-separated lists are also supported. |
string |
|
groupsPattern |
A regular expression matching the consumer groups to be mirrored. Comma-separated lists are also supported. |
string |
|
groupsBlacklistPattern |
A regular expression matching the consumer groups to exclude from mirroring. Comma-separated lists are also supported. |
string |
B.142. KafkaMirrorMaker2ConnectorSpec schema reference
Used in: KafkaMirrorMaker2MirrorSpec
| Property | Description |
|---|---|
tasksMax |
The maximum number of tasks for the Kafka Connector. |
integer |
|
config |
The Kafka Connector configuration. The following properties cannot be set: connector.class, tasks.max. |
map |
|
pause |
Whether the connector should be paused. Defaults to false. |
boolean |
B.143. KafkaMirrorMaker2Status schema reference
Used in: KafkaMirrorMaker2
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
url |
The URL of the REST API endpoint for managing and monitoring Kafka Connect connectors. |
string |
|
connectorPlugins |
The list of connector plugins available in this Kafka Connect deployment. |
|
|
connectors |
List of MirrorMaker 2.0 connector statuses, as reported by the Kafka Connect REST API. |
map array |
|
labelSelector |
Label selector for pods providing this resource. |
string |
|
replicas |
The current number of pods being used to provide this resource. |
integer |
B.144. KafkaRebalance schema reference
| Property | Description |
|---|---|
spec |
The specification of the Kafka rebalance. |
status |
The status of the Kafka rebalance. |
B.145. KafkaRebalanceSpec schema reference
Used in: KafkaRebalance
| Property | Description |
|---|---|
goals |
A list of goals, ordered by decreasing priority, to use for generating and executing the rebalance proposal. The supported goals are available at https://github.com/linkedin/cruise-control#goals. If an empty goals list is provided, the goals declared in the default.goals Cruise Control configuration parameter are used. |
string array |
|
skipHardGoalCheck |
Whether to allow the hard goals specified in the Kafka CR to be skipped in optimization proposal generation. This can be useful when some of those hard goals are preventing a balance solution being found. Default is false. |
boolean |
|
excludedTopics |
A regular expression where any matching topics will be excluded from the calculation of optimization proposals. This expression will be parsed by the java.util.regex.Pattern class; for more information on the supported formar consult the documentation for that class. |
string |
|
concurrentPartitionMovementsPerBroker |
The upper bound of ongoing partition replica movements going into/out of each broker. Default is 5. |
integer |
|
concurrentIntraBrokerPartitionMovements |
The upper bound of ongoing partition replica movements between disks within each broker. Default is 2. |
integer |
|
concurrentLeaderMovements |
The upper bound of ongoing partition leadership movements. Default is 1000. |
integer |
|
replicationThrottle |
The upper bound, in bytes per second, on the bandwidth used to move replicas. There is no limit by default. |
integer |
|
replicaMovementStrategies |
A list of strategy class names used to determine the execution order for the replica movements in the generated optimization proposal. By default BaseReplicaMovementStrategy is used, which will execute the replica movements in the order that they were generated. |
string array |
B.146. KafkaRebalanceStatus schema reference
Used in: KafkaRebalance
| Property | Description |
|---|---|
conditions |
List of status conditions. |
|
|
observedGeneration |
The generation of the CRD that was last reconciled by the operator. |
integer |
|
sessionId |
The session identifier for requests to Cruise Control pertaining to this KafkaRebalance resource. This is used by the Kafka Rebalance operator to track the status of ongoing rebalancing operations. |
string |
|
optimizationResult |
A JSON object describing the optimization result. |
map |